Protesis biomimética
Contents
Project manager
| Maker | Image | Profile |
|---|---|---|
| Bustos Fabian |

Introducción
Es muy importante para la fundación y es de mucha utilidad tener un modelo fisico que sirva de guía para las futuras soluciones a beneficiarios de protesis de miembro superior, se ha llamado al proyecto Protesis biomimética ya que el objetivo es asemejar con la mayor precision posible la cinematica del brazo humano y que este conocimiento oriente a los colaboradores hacia los conceptos a tener en cuenta en el proceso de creación de soluciones protésicas electromecánicas de miembro superior, los metodos de diseño y su fabricación.
Recursos
* humanos
xxxxxxxxxxxxxxxxxxxxxxxxxxxxx
- 1 maker
* materiales
- impresora Bogohack comprada en 2014
- Impresora fabricada por Jesus para M3D en 2019
| materiales | procedencia | fecha | costo
|
|---|---|---|---|
| xxxxxxxxxxxxxxxxxxxx | xxxxxxxxxxxxxxxxxxxxxxx | xxxxxxxxxxxxxxxxxxx | xxxxxxxxxx |
| xxxxxxxxxxxxxxxxxxxx | xxxxxxxxxxxxxxxxxxxxxxx | xxxxxxxxxxxxxxxxxxx | xxxxxxxxxx |
| filamento | protolab | 2/08/19 | 50 000 |
Diseño y planos
- Link Diseño Actual: https://www.thingiverse.com/thing:
Etapas
Diseño 3D
Modelo base

Modelo base


Analisis Mecánico
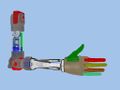
Este modelo de brazo se construirá desde el hombro hasta las falanges distales de la mano de la extremidad superior izquierda, se tendran en cuenta las imagenes No. 1 y 2 para observar los diferentes movimientos que este brazo puede ejecutar, por tratarse de un prototipo experimental y dado su tamaño, alcances y la posibilidad de generar accidentes durante las exposiciones se ha restringido su movimiento a una zona de seguridad (imagen No.3), que es ademas la mas adecuada para ejercicios basicos y experimentos de movimientos de motricidad fina.
Dentro del estudio cinemático que se realiza se tienen en cuenta la rotación angular de los actuadores de todos los grados de libertad y se define la capacidad de peso que la protesis puede levantar en determinada posición de este modo se mantiene la fuerza de trabajo normal de los motores lo que alarga la vida su vida util y la de los demas componentes estructurales de la protesis, este diseño puede ser igualmente replicado de una manera mas robusta para labores de trabajo de alto rendimiento.

1.Posiciones Posibles

2.Posiciones Posibles

3.Limites de Seguridad

4.Fuerzas celda de carga




Diseño Electrónico
Se instalarán multiples sensores en la prótesis para hacer un acercamiento a la capacidad sensorial del cuerpo humano, se utiliza un sensor para tener referencia de la temperatura de los objetos que tocan los dedos, multiples datos de fuerza se obtienen de la celda de carga que se procesan dependiendo de la posición generando una respuesta para recuperar el control. Esta extremidad integra diferentes dispositivos electronicos de medida de la rotación angular y el desplazamiento lineal, de este modo se controla su movimiento en lazo cerrado.
Sensores de Angulo y Longitud
Los sensores de ángulo del brazo se componen de un resistor variable como un potenciometro, se utiliza en distintos modelos siendo los trimmer los mas pequeños y de mayor resolución. Con este tipo de sensores se puede obtener una resolución de 8 bits (1024 muestras), se deben alimentar con una fuente de voltaje de 5V regulados y constantes para obtener una señal confiable.

Trimmer

Trimmer


Sensor de peso y tacto
En la zona posterior de la muñecase instala una celda de carga que le da al controlador de la mano, la capacidad de medir el peso levantado y asi analizar comportamientos de respuesta a determinados datos de entrada como por ejemplo, determinar si es necesario aumentar la tension en los motores para mejorar el agarre o levantar suavemente un huevo sin exceder la fuerza y romperlo. siempre que la protesis este encendida se puede utilizar la señal generada por la celda de carga para obtener sensación de toque y hasta vibración en la superficie de la palma, el resto de componentes mecanicos que esten en contacto directo con la celda transferiran ruido mecanicamente, esto sirve para que la protesis tenga una sensación basica del tacto.

1.Celda instalada

2.Celda de carga

3.Conexión común con Arduino



Actividades de ayudantes
Reportes y TS Octubre 2019
| Martes 22 Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Diseño basico de prótesis y Actualización de wiki | 6 Horas | 18 TS |