Tutores
Desarrolladores
Jefe de proyecto
Presentación
Prótesis de miembro superior para el beneficiario Andrés Camilo Sánchez, reside en la ciudad de Bogotá, tiene 15 años y el diseño de la prótesis que se propone es con principio de funcionamiento mioeléctrico.
Objetivo
Este proyecto es un proyecto de vida para Camilo. El presente espacio se dispone para documentar los modelos de prótesis que va a recibir en su proceso con la fundación materialización 3D, tratando de tener los mejores avances de la tecnología de una forma útil y asequible.
Plan de trabajo y fechas
- Investigación y planeación 24 al 25 de agosto 2020 (Mano - Mioelectrica)
- Busqueda y cotización de materiales 26 agosto 2020
- Impresión de mano tpu - Diseño antebrazo - Programación motor (codo) - Entrega de piezas impresas e implementos (7-11 agosto)
- Contrución de la máquina
- Entrega de prótesis 25 septiembre al 02 octubre
- Salomé: 25 entrega de diseño del Socket
- Entregar diseño del antebrazo 21 septiembre
Etapas
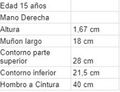
Evaluación Antropométrica
En esta etapa se dispuso a conocer el caso de Camilo, conocer sus medidas con respecto al miembro superior derecho, esto con el fin de plantear el diseño y el mecanismo con el que se desarrollará la prótesis.
Medidas miembro superior derecho
Diseño de prótesis
En el desarrollo de la propuesta del diseño de la mano para la prótesis de Andrés Camilo, se evaluaron los diseños ya antes realizados y se contemplaron las características a mejorar, es por esta razón que en este caso se propone un nuevo diseño el cual fue descargado por la plataforma Youmagine, este diseño fue modificado a las medidas del beneficiario y de igual forma se modifico para la adecuación del sistema electrónico propuesto en este caso.
En el caso del diseño de la mano se hizo una revisión bibliográfica, en la que en el documento titulado Análisis y mejora del diseño de una mano protésica se encontró la relación de las medidas de estatura y largo de la mano, para así definir que el largo de la mano.
Una vez realizado el diseño de la mano se realiza el diseño del antebrazo, para este diseño se calculó la medida del brazo, siendo desde la séptima vertebra hasta el codo, y del antebrazo que es desde el codo hasta el puño. Estos cálculos se hicieron a partir de la medida de la estatura en relación con el número phi p como se muestran a continuación:
Estatura: 1.67 m
p = 1.618
Medida de Suelo a ombligo = e/p= 1.67/1.618 = 1.03 m
Medida de Séptima vértebra a ombligo =((e-(e/p))/p)=((1.67-(1.67/1.618))/1.618)= 0.3955 m = 39.55 cm
Tronco (t)= (((e-(e/p))/p)+((((e/p)/p)/p)/p)) = (0.3955 m)+(0.2432 m) = 0.6386 m = 63.86 m
Medida de Codo a Puño = t-(t/p) = 0.6386 - (0.3955) = 0.2431 m = 24.31 cm
Desarrolladores
Septiembre 2020
Semana del 21 al 26 de septiembre
Semana del 14 al 18 de septiembre
| Viernes 18
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Diseño engranaje para servomotor de la mano y diseño antebrazo |
5 Horas |
15 TS
|
| Sebastian R. |
Se desarrollo el recorrido con el mismo sensor para ambos motores |
5 Horas |
15 TS
|
| Salomé Pérez |
Diseño de socket y corrección de imperfecciones en el escanner |
5 Horas |
15 TS
|
| Jueves 17
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Diseño de antebrazo, ajuste del espacio para los servo motores del antebrazo |
4 Horas |
12 TS
|
| Sebastian R. |
Se realizó un on/off para el circuito completo con el fin de no gastar energía y aprovecharla |
4 Horas |
12 TS
|
| Salomé Pérez |
Documentación y diseño de socket en Rhinoceros y ajustes del escaneado |
5 Horas |
15 TS
|
| Miércoles 16
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Corrección en el diseño en el momento de remover la marca de la tapa de la palma de la mano |
5 Horas |
15 TS
|
| Sebastian R. |
Finalmente se comprobó que el driver con el que venia la prótesis no se encuentra en buen estado, ademas, para mover el motor se necesita de una fuente de voltaje grande lo que genera mayor peso en el diseño de la prótesis ademas de un diseño mas robusto. Se esta buscando la forma de alternar entre eficiencia y peso utilizando los mismos componente. Ahora se proyecta utilizar baterías recargables en serie para mover el motor que hace parte del codo |
4 Horas |
12 TS
|
| Salomé Pérez |
Al hacer la reconstrucción en el programa skanect seguían quedando vacíos en aquellas partes que no fueron escaneadas correctamente, además de que quedaban secciones con irregularidades, por lo que se plantea hacer la reconstrucción en el programa Rhinoceros. |
6 Horas |
18 TS
|
| Martes 15
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Investigación de diseños para la parte del brazo y encaje con el antebrazo, ajustes del diseño de antebrazo para el brazo |
5 Horas |
15 TS
|
| Sebastian R. |
Se encontró en la electrónica que el motor se puede mover sin embargo no presenta na alta velocidad pero si un gran toque. Para corroborar eso se utilizo un puente H integrado que corresponde a la referencia L293D |
6 Horas |
18 TS
|
| Salomé Pérez |
De acuerdo con el escanner realizado se inicia la reconstrucción de las partes que no fueron escaneadas completamente ya que quedaban vacios, se hace la reconstrucción de esas partes en el programa skanect |
6 Horas |
18 TS
|
| Lunes 14
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Documentación, reunión con salome para la decisión del proyecto de la maquina de vaciado para socket, trabajo en el antebrazo |
6 Horas |
18 TS
|
| Sebastian R. |
El motor presentó de nuevo vibraciones pero en ningún momento presento un giro, para ello se opto por comprobar con otro motor si la programación estaba mal y resulta que el motor que se utilizó tampoco funcionaba |
6 Horas |
18 TS
|
| Salomé Pérez |
Reunión con Melissa para decidir entre el proyecto de máquina de inyección y la máquina de vaciado para socket, investigación y reunión con el beneficiario Andrés Camilo para toma del scanner y molde de yeso del muñón derecho |
12 Horas |
36 TS
|
Semana 7 de 11 de septiembre
| Viernes 11
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Ultimos arreglos en el diseño de la mano y revisión bibliografica acerca de la maquina de inyección |
5 Horas |
15 TS
|
| Sebastian R. |
Se desoldó los cables del motor paso a paso y se cambio por uno nuevos. Ahora el motor vibra por lo que se asume que esta funcional; es cuestión de trabajar en el sentido de giro del motor |
5 Horas |
15 TS
|
| Salomé Pérez |
Documentación y revisión de estrategias para el proyecto de máquina de vaciado para socket |
5 Horas |
15 TS
|
| Jueves 10
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Trabajo en palma de la mano |
4 Horas |
12 TS
|
| Sebastian R. |
Al utilizar la programación documentada por los compañeros anteriores se evidencio que hay un problema físico que debemos corregir. |
4 Horas |
12 TS
|
| Salomé Pérez |
Lectura del manual para impresión 3D y revisión de cómo usar el programa skanect |
5 Horas |
15 TS
|
| Miércoles 9
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Documentación y mejora en diseño de la mano |
5 Horas |
15 TS
|
| Sebastian R. |
Cambio de cables y de programación sobre el motor paso a paso |
4 Horas |
12 TS
|
| Salomé Pérez |
Visualización del video de escaneado en 3d con skanect (introducción), Lectura de material: Manuales de buenas prácticas para impresión 3D, Revisión de material ARTISTA |
6 Horas |
18 TS
|
| Martes 8
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Ajustes diseño antebrazo |
5 Horas |
15 TS
|
| Sebastian R. |
Cambio de driver para el motor |
6 Horas |
18 TS
|
| Salomé Pérez |
Investigación sobre tipos de prótesis y socket - Tipos de materiales que se utilizan |
5 Horas |
15 TS
|
| Lunes 7
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Modificaciones de diseño de antebrazo |
5 Horas |
15 TS
|
| Sebastian R. |
Investigación de una nueva programación y edición de la misma |
6 Horas |
18 TS
|
| Salomé Pérez |
Inducción de la plataforma de Utopia Maker e investigación |
6 Horas |
18 TS
|
Semana 31 de agosto 4 de septiembre
| Viernes 4
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Ajuste de diseño de antebrazo para encaje con la mano |
5 Horas |
15 TS
|
| Sebastian R. |
Se programo el motor paso a paso que se ubica en el codo del prototipo |
5 Horas |
15 TS
|
| Jueves 3
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Finalización en el diseño de la mano, encaje de la palma con la base |
4 Horas |
12 TS
|
| Sebastian R. |
Se investigo en nuevas alternativas a piezo electricos para poder someterlos a diferentes superficies y fuerzas para evaluar cual aporta un mejor resultado de acuerdo al diseño planteado |
4 Horas |
12 TS
|
| Miercoles 2
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Finalización diseño de la palma de la mano |
5 Horas |
15 TS
|
| Sebastian R. |
Se adquirió un motor nuevo por 15K COP, el motor fue sometido ante un nuevo programa y se obtuvieron resultados positivos pues logra evidenciar la fuerza, de forma binaria, que se le aplica al sensor. |
4 Horas |
12 TS
|
| Martes 1
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Trabajo en el diseño de la mano en rhinoceros |
5 Horas |
15 TS
|
| Sebastian R. |
Efectivamente el programa que se utilizo mas la aplicación de una fuerza sobre el motor termino por deteriorarlo. Se procede a investigar nuevas alternativas a estos motores |
6 Horas |
18 TS
|
| Lunes 31
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Trabajo en el diseño de la mano en tinkercad |
6 Horas |
18 TS
|
| Sebastian R. |
Se logró realizar un movimiento con el piezo electrico sobre el motor, sin embargo el programa no resulta estable |
6 Horas |
18 TS
|