Prótesis Erick
Jefe de proyecto
| Profile | Photo |
|---|---|
| Margarita Yate |

Presentación

Erick es un niño de 14 años y habita en la ciudad de Bogota, en el pasado ha sido beneficiario de la fundación con una protesis mecanica personalizada con motivo del personaje Optimus Prime de la pelicula Transformers. En este proyecto se desarrollará una prótesis mioeléctrica para su brazo izquierdo, la cual le servirá para mejorar su movilidad y será la plataforma de entrenamiento para futuras prótesis mas avanzadas.
Recursos
Para llevar a cabo la producción de esta solución se deben tener en cuenta los siguientes perfiles profesionales y el tiempo requerido para hacer entrega de la prótesis en un tiempo no mayor a 30 días.
- Psicólogo
- Fisioterapeuta
- Ingeniero Mecatrónico
- Ingeniero Electrónico
- Diseñador Industrial
- Artista Gráfico
Desarrolladores
| Maker | Photo | Profile |
|---|---|---|
| Bustos Fabian (Diseño Electrónico, Mecánico y Programación) |  |
|
| Duran Miguel (Impresión 3D y Ensamble) |  |
|
| Sebastian Martinez (Diseño 3D y Documentación ) |  |
Etapas
Evaluación Psicológica
Erick y su madre nos cuentan que la Fundación ya ha construido una prótesis para el muchacho hace algunos años, con motivo del robot Optimus Prime de la serie Transformers, nos han explicado que a causa de un incendio la protesis lamentablemente ya no existe y Erick necesita su protesis para mejorar su desempeño en las tareas diarias.
Evaluación Antropométrica
Presenta malformación al nivel de la muñeca. Por petición del beneficiario la prótesis que se va a producir sera corta, empezando en la parte media del antebrazo, y deberá ejecutar al menos 3 posiciones diferentes en la mano. Utilizará un sensor electromiográfico para controlar los movimientos de la mano.

Medidas Erick Campos

Captura de Scan Original

Modelo Procesado de Extremidad

Medidas en modelo final




Se ha tomado el scan 3D con un sensor tipo Kinect, el modelo resultante presenta imperfecciones en la superficie y se debe recortar para obtener solamente la superficie sobre la que se diseñara la prótesis, se utilizó el software Rhinoceros 6 para limpiar el modelo y se elimino la malla no necesaria.
- Link scan 3D Extremidad: [[1]]
Diseño de Prótesis
Tomando como base el Scan 3D y las medidas tomadas el día Sabado 21 de Septiembre, hemos hecho un modelo base de la prótesis sobre el cual se empezarán a diseñar los componentes de esta solución, bajo solicitud del beneficiario se respetará la superficie exterior del socket y se conservará un diámetro no mayor a ___mm para que su utilización con la ropa sea una experiencia más comoda comparada con su anterior prótesis, hasta el momento el único elemento que puede aumentar el tamaño del brazo es la batería, se hara lo posible por mantener las tolerancias de volumen dentro del límite permitido.

Diseño de Socket

Vista Previa de Ensamble




20/11/2019
Erick ha elegido el estilo que quiere para su prótesis, se trata de el modelo de brazo biónico futurista presentado por 3D Systems en Junio de 2015, en la imagen de la derecha se puede apreciar el modelo de prótesis mecánica diseñada para beneficiarios con extremidad a nivel medio de la mano, se tomarán los datos de la evaluación antropométrica para escalar los modelos de los dedos, palma y brazo a las medidas reales, se modificará el diseño original de la palma para alojar los actuadores y el circuito electrónico, la batería se posicionará a la altura del brazo o se definirá si es más viable dejarla para conectar y cargarla en el bolsillo mientras esta alimenta la prótesis por medio de un cable, esto se hace pensando en la facil utilización e interacción con las vestiduras , se utilizarán materiales rígidos y flexibles en diferentes zonas de la protesis dependiendo del análisis mecánico.

Modelo base de la prótesis






Analisis Mecánico
Esta prótesis sera mioelectrica y tendra un movimiento de agarre progresivo, se trata de una estrategia cinemática con la que es posible tener varios niveles de agarre con una sola señal de entrada y un solo actuador mecanico, de este modo la prótesis al recibir un estimulo electromiográfico de nivel bajo, el motor realizaria un agarre tipo pinza tripode (dedos pulgar, indice y medio) y en el momento de recibir una señal de biopotencial mas alto el mecanismo engrana los dedos restantes (dedos anular y meñique), para terminar en una posicion de agarre cilíndrica/esférica, con esto se espera que el beneficiario con un poco de control sobre su actividad muscular en la extremidad, pueda tomar y sostener tanto objetos pequeños utilizando la punta de los tres dedos iniciales o objetos no mayores a la palma de la mano y de un peso no mayor a 150gr. Es posible dejar un grado de libertad de inclinación de 45 grados de extensión en la muñeca, este avance sera opcional dependiendo del espacio que tengamos disponible para un motor adicional.

Agarre Pinza Trípode

Agarre Esférico

Posición de Servos Dactilares

Movimientos de Flexión y Extensión de la Muñeca

Diseño de mecanismo de Flexión y Extensión de la Muñeca






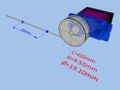
Esta prótesis utilizara actuadores tipo servo de los utilizados en modelos de RC, estos motores flexionaran los dedos por medio de hilos que se enrollan sobre poleas cuando los motores se activan, el movimiento de los dedos se reduce a un desplazamiento lineal menor a 4cm de longitud en los hilos, que es el rango entre dedos extendidos y completamente contraidos, al utilizar motores de este tipo se debe diseñar una polea compatible con el mismo teniendo en cuenta que la mitad de la circunferencia sea igual al desplazamiento del dedo, esto se debe a que el servo tiene un giro controlable de 0 a 180 grados como se muestra en la siguiente imagen.
Diseño de polea

Analisis Electrónico
21/11/2019

Analisis de posicionamiento de bateria





Impresión 3D
11/12/2019 Se ha realizado una impresión de prueba de la palma y algunos dedos del modelo publicado por 3D Systems y e-Nable, se encuentran defectos de estabilidad en el movimiento de flexión de los dedos y poca resistencia del modelo, dado que las protesis normalmente estan sometidas a esfuerzos considerables y requieren cierta precisión en los movimientos, se modificará el diseño original de los dedos para que sean impresos en material flexible, con el concepto de los dedos utilizados en la prótesis Flexy-Hand 2, que hasta el momento ha mostrado buen desempeño en el agarre de pequeños y medianos objetos, para mejorar la efectividad del agarre aún más se tratara de instalar en la superficie de las falanges distales unos fingergrips (Imagen 4 y 5), los cuales han sido muy utiles en las prótesis mecánicas antes producidas en la fundación.

Impresión de palma y dedos


Flexy Fingers

Fingergrips





Ensamble
Calibración y Entrega
Actividades
Reportes y TS 2019
Diciembre
| Miercoles 11 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Impresión y prueba de palma y dedos | 4 Horas | 12 TS |
TODO: Preparar los modelos finales disponibles para impresión en FabLab M3D Bogota. Modificar modelos de los dedos para impresión en material flexible
| Lunes 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Diseño final de Socket y mecanismo de inclinación de la muñeca | 4 Horas | 12 TS |
TODO: Finalización de modelos para impresión y diseño de manual de ensamble.
| Domingo 8 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Diseño final de Socket y mecanismo de inclinación de la muñeca | 8 Horas | 24 TS |
TODO: Finalización de modelos para impresión y diseño de manual de ensamble.
Noviembre
| Miercoles 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Escalado de los nuevos dedos para impresión, Simulacion en software para analisis de posición de batería | 3 Horas | 9 TS |
TODO: Diseño del sistema mecánico y adecuación de espacios para circuitos, actuadores, sensor y batería
| Viernes 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Diseño básico de Socket y adaptacion a la mano | 3 Horas | 9 TS |
| Sebastian Martinez | Escalado de palma y dedos a medida de la extremidad derecha | 3 Horas | 9 TS |
TODO: Diseño del sistema mecánico y adecuación de espacios para circuitos, actuadores, sensor y batería
Octubre
| Miercoles 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Edición de Scan 3D en Rhinoceros | 4 Horas | 12 TS |
| Sebastian Martinez | Procesamiento del escaneo y actualizacion de la Wiki | 1 Hora 40 minutos | 5 TS |
TODO: Diseño de socket con el scan 3D disponible
Septiembre
| Sabado 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Scanner 3D y Toma de Medidas | 2 Horas | 6 TS |
Comentarios: Queda pendiente la asignación de colaboradores