Protesis Erika Garcia
Contents
Desarrolladores y Recursos
| Profile | Photo |
|---|---|
| Johan Garcia Tutor |
|
| Erika García Jefe de Proyecto |


| Profile | Photo |
|---|---|
| Fabian Bustos (Diseño Electrónico, Mecánico y Programación) |

|
| Valentina Suarez (Practicante) |

Objetivos

- El presente proyecto se enfoca en realizar una prótesis de miembro superior trans-radial (a nivel medio del antebrazo)para la beneficiaria Erika García Bolivar de 23 años, habita en la ciudad de Medellín, en la entrevista ella expresa su necesidad de una mano fuerte y que le genere confianza a la hora de tomar objetos de peso mediano, entre los usos cotidianos que podría tener la prótesis se contempla el uso de la bicicleta por lo que un análisis y una elección de los materiales apropiados debe hacerse.
- Se deben utilizar motores DC con caja reductora, que no superen un voltaje de trabajo de 24v, que proporcionen una respuesta rápida para ejecutar tareas de manera mas natural en las partes móviles, se utilizara una tarjeta electrónica programable que recibirá señales del usuario y controlara los motores de manera proporcional al estimulo recibido por el sensor muscular y un botón selector que se activará con un movimiento específico del usuario.
Evaluación Antropométrica
Con la ayuda de un dispositivo scanner 3D (Kinect) se ha digitalizado la muestra de la extremidad tomada en yeso, se editó la malla resultante del scan con el software ZBrush y fotografías de referencia, para lograr una representación tridimensional aproximada de la extremidad, este será la parte principal sobre la que se construye la prótesis propuesta.

Molde extremidad frontal

Molde extremidad bilateral

Medidas anatomicas de los miembros superiores de la beneficiaria



Diseño de Prótesis e Impresión 3D
Se ha iniciado el proceso de diseño de la mano mecánica teniendo en cuenta los requerimientos del usuario. Los materiales de la mano mecánica deben soportar esfuerzos considerables debido a la actividad relacionada con el uso de la bicicleta, por lo cual se ha decidido construir un prototipo de una mano con polímeros de alta resistencia para mantener un agarre fuerte y seguro de los objetos o en este caso el manubrio. Debido a que esta prótesis se diseñará de forma sencilla solo teniendo en cuenta la parte mecánica se realizo una búsqueda en la plataforma Thingiverse de un prótesis transradial encontrando el mecanismo que se evidencia en las fotos, cada componente fue ensamblado y escalado a las medidas anatómicas de la beneficiara en el software Fusion 360.
Para el modelado 3D se utilizaron los programas Fusion 360 para la modificación de piezas existentes y la generación de nuevos complementos para el prototipo. El mecanismo original se compone de los todos los dedos los cuales se utilizan para hacer el movimiento de agarre necesario para montar en bicicleta, e brazo y el manguito. Se debe agregar que para la rotación de la muñeca el diseño encontrado en Thingiverse se modifico, con el objetivo de cumplir esta función se creo una pieza adicional que une el brazo con la mano y permite realizar esta rotación a esa pieza se le denomino muñeca. Es importante mencionar que esta pieza cuenta con dos partes, una que esta ensamblada al brazo y la otra esta ensamblada a la mano, la parte que esta ensamblada en la mano es la que permite a rotación, la otra pieza esta rigida al brazo.

Diseño de mano

Diseño del brazo completo
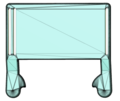
Diseño del manguito
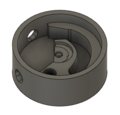
Diseño de la muñeca parte del brazo

Diseño de la muñeca parte de la mano




Todas las piezas de la prótesis fueron impresas en la Fundación Materialización 3D, estas las piezas exceptuando la parte de la muñeca fueron impresas solo una vez, ya que, estaban ajustadas a las medidas correspondientes a la beneficiaria. La pieza de la muñeca se imprimió en diferentes ocasiones con el fin de lograr su funcionamiento de rotación. Cabe agregar que las piezas de los dedos, la mano, el brazo y el manguito se imprimieron en PLA y las piezas de unión entre los dedos se imprimieron en TPU.

Falange proximal

Manguito

Brazo

Piezas de unión en TPU




Ensamble
Al tener las piezas impresas se procedió a ensamblar la prótesis, la primera parte en unir fue la mano, es importante mencionar que para el movimiento de los dedos se utilizo cáñamo como se evidencia en las imágenes, para que los dedos se cerraran de una manera correcta, se realizaron varias pruebas en donde se colocaba el cañamo de diferentes formas, en las primeras pruebas se colocaron piezas de tensión para mejorar el cierre de la mano, sin embargo, esta pieza se quito debido a que el cañamo se estiraba, por lo cual se opto por dejarlo directo.

Ensamble de la mano



Después, se continuo con el ensamble del manguito al brazo para lo cual se realizo la termo deformación del manguito teniendo como base una botella para que tomara una forma circular, al realizar esto se ensamblo a la pieza del brazo con pernos de metal. Para finalizar se ensamblo la pieza correspondiente de la muñeca al brazo y después a la mano con un tornillo que atravesaba todas las piezas, este tornillo tenia un rodamiento que esta ubicado en la parte de la muñeca para permitir el movimiento de la rotación, además se coloco el cañamo hasta el final del brazo.

Termodeformación del manguito

Ensamble del manguito al brazo


Correcciones y entrega
El día 13 de noviembre la beneficiaria se dirigió a la Fundación Materialización 3D con el fin de medirse la prótesis, se realizaron diferentes pruebas. La primera fue determinar si el tamaño del socket correspondía con el muñón, se determino que la pieza del socket era más grade, sin embargo, se realizaron otras pruebas de funcionamiento donde la beneficiaria monto bicicleta con la prótesis y se observo que pudo realizar dicha acción. Teniendo en cuenta que tocaba hacerle diferentes correcciones a la prótesis se determino con la beneficiara enviar la prótesis una semana después.
Las correcciones que se realizaron fueron en primer lugar colocar fomi para que el socket se ajustara mejor al brazo, después se colocaron dos arandelas en la unión entre el manguito y el brazo para que esta fuera más estable y por ultimó se tenso más el cañamo para poder realizar un mejor cierre de la muñeca. La prótesis fue enviada a Medellín el día 22 de noviembre.

Ensamble completo de la prótesis



Actividades
Reportes y TS 2020
Noviembre
| Jueves 4 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Búsqueda del resorte adecuado para el funcionamiento de giro e impresión final de pieza de la muñeca | 7 Horas | 21 TS |
| Miércoles 3 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Impresión de la pieza de la muñeca y pruebas de funcionamiento respecto al giro | 7 Horas | 21 TS |
| Martes 2 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Rediseño de la pieza de la muñeca deacuerdo al mecanismo de botón comprado | 7 Horas | 21 TS |
Octubre
| Viernes 29 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Ajustes del encadenado de la mano | 4 Horas | 12 TS |
| Jueves 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Impresión de piezas en TPU para el ensamble de los dedos y encadenado de la mano | 7 Horas | 21 TS |
| Miércoles 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Impresión de piezas en TPU para el ensamble de los dedos | 7 Horas | 21 TS |
| Martes 26 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Ajustes físicos a la pieza de la mano para ensamblar el rodamiento | 7 Horas | 21 TS |
| Viernes 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Rediseño de piezas del brazo e impresión | 4 Horas | 12 TS |
| Jueves 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Ensamble de piezas al brazo y pruebas de funcionamiento del brazo con el manguito | 7 Horas | 21 TS |
| Miércoles 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Ajustes del ensamble del manguito y el brazo | 7 Horas | 21 TS |
| Martes 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Ensamble del manguito con el brazo, compra de tornillos necesarios para el ensamble | 7 Horas | 21 TS |
| Viernes 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Termo deformación del manguito y ajustes físicos de la pieza | 4 Horas | 12 TS |
| Jueves 14 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Pruebas de funcionamiento de la pieza impresa | 7 Horas | 21 TS |
| Miércoles 13 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Impresión de la pieza de unión y pruebas de funcionamiento | 7 Horas | 21 TS |
| Martes 12 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Rediseño de la pieza de unión que hace referencia a la muñeca | 7 Horas | 21 TS |
| Viernes 8 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Rediseño de la pieza de unión que hace referencia a la muñeca | 4 Horas | 12 TS |
| Jueves 7 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Impresión de las piezas 3D y ensamble con los tornillos adquiridos | 7 Horas | 21 TS |
| Miércoles 6 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Cambios en el diseño de 3D de la prótesis de acuerdo a las piezas adquiridas | 7 Horas | 21 TS |
| Martes 5 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Cambios en el diseño de 3D de la prótesis de acuerdo a las piezas adquiridas | 7 Horas | 21 TS |
| Viernes 1 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Medición de piezas necesarias para la prótesis y su diseño en Fusion 360 | 4 Horas | 12 TS |
Septiembre
| Jueves 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Impresión de piezas y ensamble | 7 Horas | 21 TS |
| Miercoles 29 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Ajustes mecánicos en software 3D e impresión de piezas | 7 Horas | 21 TS |
| Martes 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Diseño de prótesis en software 3D | 7 Horas | 21 TS |
| Viernes 24 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Impresión de piezas | 4 Horas | 12 TS |
| Jueves 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Ajustes mecánicos en software 3D | 7 Horas | 21 TS |
| Miercoles 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Impresión de piezas | 7 Horas | 21 TS |
| Martes 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Diseño de prótesis en software 3D e impresión de piezas | 7 Horas | 21 TS |
| Viernes 17 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Diseño de prótesis en software 3D | 4 Horas | 12 TS |
| Jueves 16 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Análisis del caso, diseño de prótesis en software 3D | 7 Horas | 21 TS |
| Miércoles 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suárez | Análisis del caso | 7 Horas | 21 TS |
| Martes 14 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Montaje de medidas en software 3D, Análisis del caso | 2 Horas | 6 TS |
| Lunes 13 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Montaje de medidas en software 3D, Análisis del caso | 2 Horas | 6 TS |