Protesis de codo Carolina Huertas
Contents
Desarrolladores y Recursos
| Jefes de Proyecto | Desarrolladores | Contabilidad | |||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
|




Etapas
Objetivos

- El presente proyecto se enfoca en realizar una prótesis de miembro superior trans-humeral (a nivel medio del brazo) para la beneficiaria Carolina Huertas de 26 años que habita en la ciudad de Tunja, en la entrevista ella expresa su necesidad de una mano fuerte y que le genere confianza a la hora de tomar objetos de peso mediano, entre los usos cotidianos que podría tener la prótesis se contempla el uso de la bicicleta
Requerimientos
- Implementar materiales que permitan el uso seguro de la cicla.
- Voltaje de trabajo máximo de 24V .
- Realizar una respuesta rápida en movimientos (Codo-Mano) programados en la tarjeta electrónica.
- Movimiento independiente de cada motor mediante señal del usuario.
Evaluación Antropométrica
.jpg)
Según el análisis de las dimensiones de la extremidad y después de un repaso por los diferentes tipos de actuadores disponibles en el mercado, se ha logrado integrar un motor-reductor en la parte baja del socket, este motor tiene torque suficiente para levantar la extremidad, gracias a su tamaño reducido ayudara a suplir los requerimientos de simetría y gracias a su composición de polímero resistente reducirá el peso total de la prótesis.
Con la ayuda de un dispositivo scanner 3D (Kinect) se ha digitalizado la muestra de la extremidad tomada en yeso, se editó la malla resultante del scan con el software ZBrush y fotografías de referencia, para lograr una representación tridimensional aproximada a la extremidad, este será la parte principal sobre la que se construye la prótesis propuesta.

Medida prótesis mecánica Carolina Huertas

Molde de extremidad, vista lateral

Molde de extremidad, vista frontal
Modelo 3D extremidad
Modelo 3D extremidad
Modelo 3D extremidad



.jpg)
.jpg)
Diseño de Prótesis e Impresión 3D

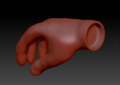
Al inicio del proceso de diseño de la mano mecánica, se tuvo en cuenta los requerimientos del usuario. Los materiales de la mano mecánica deben de soportar esfuerzos considerables debido a la actividad relacionada con uso de la bicicleta, por lo cual decidió construir un prototipo de una mano con piezas metálicas y polímeros de alta resistencia para mantener un agarre fuerte y seguro de los objetos. En esta parte de la prótesis se utiliza la impresión 3D solamente como método de prototipado mas no como el producto final.
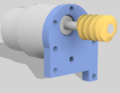
Con respecto al actuador a cargo del movimiento de la muñeca, se ha encontrado una compatibilidad entre un motor DC de alto torque (37GB) y el prototipo de la mano existente, se logra esto por medio de una transmisión tipo Worm Gear que toma la fuerza torsional del motor y lo transmite linealmente al mecanismo.

Diseño Inicial de Mano Mecánica

Render con Simulación de Texturas

Transmisión Tipo Worm Gear
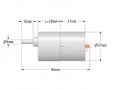
Motor con Caja Reductora 12V

Motor 37GB

Ensamble Motor-Transmision.




_37mm_Low_RPM_DC_Geared_Motor_with_gearbox_12VDC_200RPM_37GB.png)

Para el modelado 3D se utilizaron los programas Fusion 360, Rhinoceros 6 y ZBrush 4R8 para la modificación de piezas existentes y la generación de nuevos complementos para el prototipo. El mecanismo original se compone de los dedos pulgar, índice y medio, los cuales se utilizan para hacer el movimiento de agarre necesario para montar en bicicleta, este modelo se modifico para tener un mejor agarre colocándole un motor al mecanismo, a su vez el prototipo va cubierto por un diseño de una mano elástica como se evidencia en las imágenes, es importante mencionar que esta mano tiene los dedos anular y meñique rígidos.

Guante estético


Modelo 3D


Modelo de la mano con el diseño mecánico

Modelo de la mano







Se realizo una representación tridimensional de las medidas reales del caso en software de modelado 3D (Rhinoceros 5 y Fusion360), con el objetivo de realizar ensambles y simulaciones requeridas (Etapas 1 - X) manteniendo las medidas antropométricas ideales.

Visualización de medidas

- Etapa 1 (Revisión de mano y soporte de muñeca)
Durante los intentos de implementación de esta mano se realizaron correcciones al mecanismo de función de cierre alterando las poleas que permitían este movimiento, se decidió implementar un Piñón-Polea con 10° de inclinación en crestas impreso en 3D para reemplazar y optimizar el mecanismo existente, el resultado permitió la conservación del perímetro ideal en la circunferencia de la muñeca según medidas antropométricas tomadas a Carolina Huertas.

Simulación de mano antes de cambio de piñón y poleas

Piñón-polea en soporte para dedos, vista latera

Piñón-polea, vista frontal


- Etapa 2 (Construcción de mano a antebrazo)
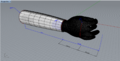
Durante el inicio de la esta etapa y pensando en la libertad anatómica que requiere la mano frente al movimiento de la muñeca, se pensó en un sistema de estrías como se puede ver en la imagen de abajo, las cuales funcionarían como guías para el desplazamiento circular, este mecanismo fue montado en la zona transradial/ulnar para evitar dañar el sistema de movimiento pinza en la mano; se implemento además un sistema tipo palanca de primer grado para asegurar las 2 piezas del antebrazo y evitar posibles movimientos no deseados durante el uso de la protesis.

Simulación hasta zona transradial, vista lateral con aristas ocultas

Simulación hasta zona transradial, vita isométrica con aristas ocultas

Seguro tipo palanca, vista lateral

Seguro tipo palanca, vista isométrica

Sistema de asegurado en antebrazo a codo, vista superior

Muñeca a antebrazo, vista isométrica con aristas ocultas






- Etapa 3 (Construcción de antebrazo a codo)
Dado que es la zona que tiene mayor espacio para disponer objetos posee varios espacios diseñados exclusivamente para baterías, tarjetas de carga, tarjeta controladora y puerto de carga, además de claramente el motor que generara el movimiento y sostén de todo el antebrazo a la zona del brazo y socket.

Posicionamiento de elementos en antebrazo, vista posterior

Posicionamiento de elementos en antebrazo, vista isométrica con aristas ocultas


- Etapa 4 (construcción de codo a socket)
- Etapa 5 (Impresión y ensamble)
Una vez se han completado las anteriores etapas, es posible comenzar a generar el ensamblaje total de la prótesis, siguiendo el orden adecuado se inicia con la mano (etapa 1) y su soporte lo cual ayuda a la conexión entre la muñeca y la primera parte del antebrazo (Imagen xx)

Muñeca a antebrazo impreso y montado con motor y switch
.jpg)
Análisis Mecánico
10/09/2021
Después de realizar el montaje de la mano con el motor se han realizando las pruebas de de desempeño del ensamble, con respecto a la fuerza de agarre se evidencia una presión considerable en la pinza. Se encuentra un problema en cuanto al tamaño del piñon , ya que afecta la velocidad de ejecución y por ende el carácter mecánico/eléctrico del prototipo, por lo cual, se decidió reducir el piñón de 45 mm a 30 mm de diámetro y de esta forma disminuir la velocidad de ejecución con el fin de tener un mejor agarre, es importante tener en cuenta que esta modificación requiere un mayor voltaje el mecanismo.
Debido a este ajuste se realizaron diferentes modificaciones en el prototipo, por ejemplo, la pieza soporte se tuvo que reducir y además posicionar de una manera diferente algunos huecos de los tornillos como se evidencia en las imágenes, de esta forma el motor se acomodo a una altura más baja ocupando menos espacio en el guante elástico.
Ensamble Motor-Transmisión

Mecanismo ottobock diseñado en Fusion 360 y Rhinoceros
Prototipo del soporte de la muñeca



Mecanismo ottobock

Mecanismo ottobock de ejemplo


Soporte muñeca

Diferentes soportes de muñeca

Anillo de unión entre el mecanismo y el brazo






Analisis Electrónico
10/09/2021
La prótesis utiliza dos motores DC reductores, asignados a las funciones de flexión / extensión de codo y apertura /cierre de la mano, cada motor va controlado por un puente h y un sensor de posición, los mecanismos de entrada para control de usuario se componen de un botón selector de diferentes modos o actuadores y de un sensor de actividad muscular, en un primer modo de selección, el motor seleccionado será el del codo y ejecutará un movimiento proporcional a la actividad muscular de la extremidad, en el rango que va desde la posición de brazo extendido hasta una flexión de 90 grados, al presionar de nuevo el botón selector el control apuntará hacia el motor de la mano, de igual manera proporcional a la actividad muscular de la extremidad.
Calibración y Entrega
Actividades
Reportes y TS
Octubre 2021
| Sábado 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Acompañamiento en programación y electrónica e integración con diseño, documentación | 4 Horas | 12 TS |
| Juan Andrés Gonzales | Pruebas con programación y electrónica | 7 Horas | 21 TS |
| Viernes 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Acompañamiento en programación y electrónica e integración con diseño | 7 Horas | 21 TS |
| Juan Andrés Gonzales | Pruebas con programación y electrónica | 4 Horas | 12 TS |
| Jueves 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Acompañamiento en programación y electrónica e integración con diseño | 7 Horas | 21 TS |
| Juan Andrés Gonzales | Pruebas con programación y electrónica | 4 Horas | 12 TS |
| Miércoles 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Acompañamiento en programación y electrónica e integración con diseño | 7 Horas | 21 TS |
| Juan Andrés Gonzales | Inicio de programación y electrónica | 4 Horas | 12 TS |
| Martes 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Acompañamiento en programación y electrónica e integración con diseño | 7 Horas | 21 TS |
| Juan Andrés Gonzales | Inicio de programación y electrónica | 4 Horas | 12 TS |
| Jueves 14 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Compra de materiales generales de prótesis y ensamble parcial | 7 Horas | 21 TS |
| Miércoles 13 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Arreglos de diseños (Etapa 1, 2 y 3) | 7 Horas | 21 TS |
| Martes 12 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Arreglos de diseños (Etapa 1, 2 y 3) | 7 Horas | 21 TS |
| Lunes 11 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Ensamblaje etapa 1, 2 y 3 (Etapa 5) | 7 Horas | 21 TS |
| Sábado 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Impresión de etapa 3 y ensamblaje etapa 1 y 2 (Etapa 5) | 7 Horas | 21 TS |
| Viernes 8 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Impresión de etapa 3 y ensamblaje etapa 1 y 2 (Etapa 5) | 7 Horas | 21 TS |
| Jueves 7 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Impresión de etapa 3 y ensamblaje etapa 1 y 2 (Etapa 5) | 7 Horas | 21 TS |
| Miércoles 6 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Arreglos de 3, impresión de etapa 2 y ensamblaje etapa 1 (Etapa 3)(Etapa 5) | 7 Horas | 21 TS |
| Martes 5 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Arreglos de 3 e impresión de etapa 2 (Etapa 3)(Etapa 5) | 7 Horas | 21 TS |
| Lunes 4 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Arreglos de 3 (Etapa 3) | 7 Horas | 21 TS |
| Viernes 1 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Arreglos de etapas 2 y 3 (Etapa 2)(Etapa 3) | 7 Horas | 21 TS |
Septiembre 2021
| Jueves 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Arreglos de etapas 2 y 3 (Etapa 2)(Etapa 3) | 7 Horas | 21 TS |
| Miércoles 29 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Arreglos de etapas 2 y 3 (Etapa 2)(Etapa 3) | 7 Horas | 21 TS |
| Martes 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Impresión y prueba de etapa 1 y arreglos de etapa 3 (Etapa 3)(Etapa 5) | 7 Horas | 21 TS |
| Lunes 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Impresión y prueba de etapa 1 (Etapa 5) | 7 Horas | 21 TS |
| Sabado 25 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Prueba de etapa 2 impresa (Etapa 5) | 7 Horas | 21 TS |
| Viernes 24 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Prueba de etapa 2 impresa (Etapa 5) | 8 Horas | 24 TS |
| Jueves 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Mejora en diseño de muñeca a antebrazo e impresión (Etapa 2 y 5) | 8 Horas | 24 TS |
| Miércoles 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Mejora en diseño de muñeca a antebrazo (Etapa 2) | 8 Horas | 24 TS |
| Lunes 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Prueba de sistema giro y arreglos de unión a codo (Sensorica)(Etapa 3) | 7 Horas | 21 TS |
| Sábado 18 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Posicionamiento de relleno en antebrazo y arreglos de unión a codo (Etapa 3) | 4 Horas | 12 TS |
| Viernes 17 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Prueba de sistema giro y posicionamiento de relleno en antebrazo (Etapa 3) | 7 Horas | 21 TS |
| Jueves 16 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Modelado de seguro en sistema giro (Etapa 2) centrado en conexión a codo | 7 Horas | 21 TS |
| Miércoles 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Modelado de seguro en sistema giro (Etapa 2) | 7 Horas | 21 TS |
| Martes 14 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suarez | Diseño de dedo mecánico para impresión | 7 Horas | 21 TS |
| Juan Diego Peña | Modelado de seguro en sistema giro (Etapa 2) | 7 Horas | 21 TS |
| Lunes 13 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Modelado de sistema giro en antebrazo (Etapa 2) | 7 Horas | 21 TS |
| Viernes 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suarez | Diseño de dedo mecànico, Simulación de flexión / Extensión | 4 Horas | 12 TS |
| Juan Diego Peña | Montaje de medidas en software 3D, modelado de brazo base, corrección de partes de mano | 7 Horas | 21 TS |
| Fabian Bustos | Montaje de medidas en software 3D, modelado de brazo base, corrección de partes de mano | 7 Horas | 21 TS |
| Jueves 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suarez | Diseño de dedo mecànico, Simulación de flexión / Extensión | 7 Horas | 21 TS |
| Juan Diego Peña | Montaje de medidas en software 3D, modelado de brazo base, corrección de partes de mano | 7 Horas | 21 TS |
| Fabian Bustos | Montaje de medidas en software 3D, modelado de brazo base, corrección de partes de mano | 7 Horas | 21 TS |
| Miercoles 8 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Montaje de medidas en software 3D, modelado de brazo base, corrección de partes de mano | 7 Horas | 21 TS |
| Fabian Bustos | Montaje de medidas en software 3D, modelado de brazo base, corrección de partes de mano | 7 Horas | 21 TS |
| Martes 7 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suarez | Diseño de dedo mecànico, Simulación de flexión / Extensión | 7 Horas | 21 TS |
| Juan Diego Peña | Montaje de medidas en software 3D, modelado de brazo base, corrección de partes de mano | 7 Horas | 21 TS |
| Fabian Bustos | Montaje de medidas en software 3D, modelado de brazo base, corrección de partes de mano | 7 Horas | 21 TS |
| Lunes 6 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Montaje de medidas en software 3D, modelado de brazo base | 7 Horas | 21 TS |
| Fabian Bustos | Montaje de medidas en software 3D, modelado de brazo base, corrección de partes de mano | 7 Horas | 21 TS |
| Sabado 4 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Montaje de medidas en software 3D, modelado de brazo base | 4 Horas | 12 TS |
| Viernes 3 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suarez | Análisis de medidas, Diseño de Mano | 4 Horas | 12 TS |
| Juan Diego Peña | Diseño de Partes, Contacto para solicitud de medidas | 7 Horas | 21 TS |
| Fabian Bustos | Análisis de medidas, Diseño de Mano | 7 Horas | 21 TS |
| Jueves 2 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suarez | Análisis de medidas, Diseño de Mano | 7 Horas | 21 TS |
| Juan Diego Peña | Diseño de Partes de la Muñeca | 7 Horas | 21 TS |
| Fabian Bustos | Análisis de medidas, Diseño de Mano | 7 Horas | 21 TS |
| Miércoles 1 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suarez | Análisis de medidas, Diseño de Mano | 7 Horas | 21 TS |
| Juan Diego Peña | Diseño de Partes de la Muñeca | 7 Horas | 21 TS |
| Fabian Bustos | Análisis de medidas, Diseño de Mano | 7 Horas | 21 TS |
Agosto 2021
| Martes 31 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suarez | Análisis de medidas, Diseño de Mano | 7 Horas | 21 TS |
| Juan Diego Peña | Diseño de Partes de la Muñeca | 7 Horas | 21 TS |
| Fabian Bustos | Análisis de medidas, Diseño de Mano | 7 Horas | 21 TS |
| Lunes 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan Diego Peña | Diseño de Partes de la Muñeca | 7 Horas | 21 TS |
| Fabian Bustos | Análisis de medidas, Diseño de Mano | 6 Horas | 18 TS |
| Viernes 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suarez | Análisis de medidas, Diseño de Mano | 4 Horas | 12 TS |
| Juan Diego Peña | Preparación de Programación | 7 Horas | 21 TS |
| Fabian Bustos | Análisis de medidas, Diseño de Mano | 6 Horas | 18 TS |
| Jueves 26 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suarez | Análisis de medidas, Diseño de Mano | 8 Horas | 24 TS |
| Juan Diego Peña | Preparación de Programación | 7 Horas | 21 TS |
| Fabian Bustos | Análisis de medidas, Diseño de Mano | 4 Horas | 12 TS |
| Miercoles 25 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suarez | Análisis de medidas, Diseño de Mano | 8 Horas | 24 TS |
| Juan Diego Peña | Preparación de Programación | 7 Horas | 21 TS |
| Fabian Bustos | Scan 3D y Modelado de Extremidad | 4 Horas | 12 TS |
| Martes 24 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Suarez | Preparación de Programación | 8 Horas | 24 TS |
| Fabian Bustos | Análisis de datos | 4 Horas | 12 TS |