Difference between revisions of "Segunda protesis para Matias"
(→Motores) |
(→Motores) |
||
| Line 207: | Line 207: | ||
Motor DAIICHI vista Isometrica.PNG |Vista isométrica el motor DAIICHI | Motor DAIICHI vista Isometrica.PNG |Vista isométrica el motor DAIICHI | ||
Motor DAIICHI.PNG|Vista Lateral el motor DAIICHI | Motor DAIICHI.PNG|Vista Lateral el motor DAIICHI | ||
| − | Motor m.PNG|Modelado aproximado de motor DAIICHI | + | Motor m.PNG|Modelado aproximado de motor DAIICHI vista frontal |
| + | Motor mm.PNG|Modelado aproximado de motor DAIICHI vista isométrica | ||
</gallery> | </gallery> | ||
Revision as of 18:43, 12 March 2020
Contents
Jefe de proyecto
| Maker | Image | Profile |
|---|---|---|
| Rojas Julian |

Presentacion

Historico
Matias a sus 10 años, en la ciudad de Bogotá, ha sido beneficiario de la primera prótesis 3D mioelectrica de brazo completo hecha en Colombia con la fundación M3D. En agosto de 2017 los voluntarios de M3D , Andres tolosa, Javier Garzon, Jaime Galindo, Cristina Aceveda y Nicolas Huchet participaron a la fabricación la prótesis de Matias.
Objetivo
Este proyecto es un proyecto de vida para Matias. Vamos a documentar aqui todos los modelos de protesis que va a recibir Matias durante su proceso de crecimiento, tratando de tener para él siempre los mejores avances de la tecnologia, para que el uso de la prótesis puede ser cada vez más util para él.
Recursos necesarios
* Recursos humanos: * Coordinadores que recepcionan y administran el dia a dia del fablab, del lunes al sabado: 3 horas en la mañana y 3 en la tarde. * fisioterapeuta: 2 horas * Psicologo: 5 horas * ingenieros: 90 horas * Fablab manager: 20 horas * diseñador: 90 horas
* Recursos financieros:
* Servomotor, baterias, sensores para la protesis:700.000cop(200€)
* Materiales para impresion y diversas heramientas: 350.000cop(100€)
Total presupuesto: 1.050.000cop(300€)
Equipo
Ingenieros y fablab managers:
| Maker | Foto |
|---|---|
| Luna León |

| Maker | Foto |
|---|---|
| Jeferson Hernandez |

| Maker | Foto |
|---|---|
| Kraszewski Nicolas |

| Maker | Foto |
|---|---|
| Bustos Fabian |

| Maker | Foto |
|---|---|
| mabloc |

| Maker | Foto |
|---|---|
| Cris |

Fisioterapeuta:
| Maker | Foto |
|---|---|
| Lorena13 |

Psicologo:
Diseño y planos
- Link Diseño: https://www.thingiverse.com/thing:3836109
Etapas
Evaluación Psicológica
Matias es un niño muy activo y apasionado por los deportes, su deporte favorito es el fútbol por lo cual ha elegido a Santa fe como temática para su nueva prótesis, se espera que esta ayude de manera funcional a su movilidad y que lo represente como un sello de su personalidad y gustos
Evaluación Antropométrica
Matías tiene una amputación a nivel del codo en el brazo derecho, esta prótesis sera una extensión de la extremidad a modo de codo y antebrazo la cual permitirá el movimiento de codo en un grado de libertad y mano flexible con un movimiento de pinza básico inicialmente.

Vista Frontal

Vista Lateral

Vista Superior

Medidas tomadas




Diseño de Extremidad
Para tener un modelo tridimensional del muñón de Matías se utilizó el software Skanect el cual realiza un scaner en 3D de la extremidad permitiendo recrearla digitalmente y así tener un referente al modelar la prótesis y sobretodo el socket para que las dimensiones sean adecuadas a las corporales del beneficiario, este modelo se escalo deacuerdo a las medidas antripometricas de Matias para asi tener en cuena los volumenes que ocupan los componentes mecánicos y el circuito electrónico para el correcto funcionamiento de la prótesis

Escaner extremidad superior derecha Matías

Diseño de la Prótesis
Teniendo en cuenta las mediciones antropométricas tomadas y el scaner realizado se empezo el proceso de modelamiento de la prótesis y socket, para esto se tuvo en cuenta el espacio para la adecuación de los circuitos funcionales y la mecánica de funcionamiento de la prótesis, ademas se busco que la prótesis fuera mas corta y que se asemeje lo mayor posible a sus medidas antropometricas reales.
En segunda instancia se busco implementar un diseño del equipo de fútbol Santa Fe basado en la imagen .... con el fin de personalizar la prótesis de acuerdo al gusto de Matias
Modelo preeliminar Prótesis antebrazo de Matias
Modelo preeliminar socket Matias

Modelo preeliminar Prótesis antebrazo y socket Matias



Posteriormente se empezaron a realizar modificaciones a estos diseños ya que se encontraban fallas en su funcionalidad y/o resistencia.
Materiales de construcción
Para los materiales de construcción se tuvieron en cuenta cada una de las funciones que iba a desempeñar cada parte. Así, el socket, el antebrazo, la muñeca y algunas partes de la mano se imprimieron en el material PLA que es el más resistente
Socket
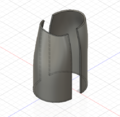
En un principio el socket se había diseñado con base en la forma del muñón de Matías, buscando cubrirlo en su totalidad (imágenes 1 y 2). En él se encuentran dos piezas que unen el socket con la prótesis del antebrazo y permiten el movimiento de ésta, una pieza se encarga de anclar el servomotor que moverá la prótesis y que hará de codo, y la otra, es un eje rotatorio de apoyo al socket. Sin embargo, este diseño no presentaba mucha firmeza y resistencia frente a esfuerzos mecánicos altos, por lo cual se descartó la idea de tener dos partes del socket.

Imagen1: Primera modificación socket

Imagen2: Primera modificación socket


Posteriormente, se rediseñó el socket con el fin de que una sola pieza cubriera más área del brazo y así mejorar su resistencia a esfuerzos, adicional a esto se le hizo un espacio al sensor mioeléctrico que se va a utilizar ya que antes no se había tenido en cuenta y se mejoraron los anclajes al socket de las piezas de unión a la prótesis. Se imprimió la pieza de unión al servo para verificar que encajara bien.

Imagen3: Segunda modificación socket

Después se volvió a rediseñar el socket debido a que en una sola pieza la impresión era complicada y no quedaba bien, por lo cual, se diseñaron unas muescas para poder anclas las piezas de unión y así poder imprimir el socket y quedara bien.

Imagen4: Modificación final del socket

Antebrazo
Para el diseño del antebrazo se tuvo en cuenta el registro fotografico, el cual se inserto en el programa de modelamiento fusion 360 con el fin de diseñar la protesis lo mas similiar a su extremidad izquierda como se ve en las imagenes 1 y 2, una vez realizado el modelamiento se escalo a las medidas antropometricas reales de Matias y se procedio a realizar las piezas internas para el adecuameinto de los sistemas electronicos, mecanicos, y de energia.

thumb

thumb
Inicialmente se diseño una pieza interna para la adecuación del servomotor que cumple la funcion de movimiento de codo y para las baterias de alimentacion de la protesis, para ello se tuvo en cuenta que esta pieza ajustara exactamente en el modelo de antebrazo ya que sobre la misma se ensamblaria el socket y se ejecutaria la mayor fuerza al momento de mover el antebrazo (flexión en el codo). Para este diseño de protesis se busca que el eje del servomotor sobresalga del diseño de antebrazo, esto debido a que debe ir unido a las extenciones del socket las cuales son rigidas y de esta manera permitir el movimiento, por otra parte en el lado opuesto de la pieza se realiza una extencion a modo de eje con el fin que sobresalga del modelo de antebrazo ya que esto permitira que se genere rotación, esta pieza es de gran importancia ya que sin ella no exixtiria movimiento del antrebazo, mano y muñeca.

Pieza interna para acople motor y baterías
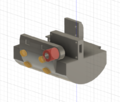
Diseño de eje de rotación (rojo) y modificaciones de encaje a antebrazo (naranja)
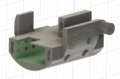
Compartimiento para baterías(verde)

Perforaciones para tuercas(azul) y tornillos para acople de servomotor(verde)

Ensamblaje de servomotor a pieza de acople

Ensamblaje de servomotor y pieza a antebrazo
Vista de ensamblaje de servomotor
Vista de ensamblaje final al antebrazo
Adecuación de pieza interior a antebrazo









Para la adecuación de la parte mecánica se realizo el diseño de una pieza en forma de lamina en la que se fijaron tanto los piñones como los motoreductores los cuales ejercerían el movimiento de los dedos para generar dos tipos de agarre

Pieza en forma de Lamina
Adecuación de motores y piñones vista diagonal

Adecuación de motores y piñones vista superior

Adecuación de motores y piñones vista lateral
Adecuación de motores y piñones vista diagonal con ensamble a antebrazo





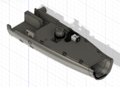
Vista isométrica del antebrazo diseñado para la prótesis de Matias

Vista lateral del antebrazo diseñado para la prótesis de Matias

Vista superior del antebrazo diseñado para la prótesis de Matias

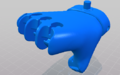
Codo
Para el diseño del codo se tuvo presente las medidas que aparecen anexas en la wiki. Posteriormente se realizó el modelado en Fusion 360 con el din de que el paciente logre a partir de esta hacer movimientos "normales" con el codo, acoplando el mismo al antebrazo anteriormente diseñado. Una vez realizado el modelamiento se escaló a las medidas antropométricas reales de Matías y se procedió a realizar las piezas internas para el adecuamiento de los sistemas electrónicos, mecánicos, y de energía.

Vista lateral del diseño del codo
Vista superior del diseño del codo

Vista isométrica del diseño del codo

Vista isometrica del diseño del codo acoplado al antebrazo

Vista superior del diseño del codo acoplado al antebrazo

Vista Lateral del diseño del codo acoplado al antebrazo




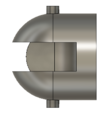
Motores
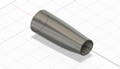
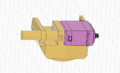
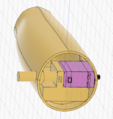
En cuanto al movimiento de la zona del codo que el paciente podrá realizar, se implementará el motor DAIICHI el cual cuenta por un voltaje de 24v, torque de 1.47N y 0.4 rpm (Vista isométrica el motor DAIICHI - Vista Lateral el motor DAIICHI). A partir de lo anterior se realiza el modelado del motor en Fusion 360 con el fin de lograr acoplarlo a las piezas anteriormente diseñadas (Acople del antebrazo con el codo). Una vez más, con el objetivo de lograr el tamaño correcto, escaló a las medidas antropométricas actuales y reales de Matías y se procedió a realizar las piezas internas para el adecuamiento de los demás sistemas electrónicos, mecánicos, y de energía.

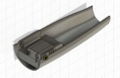
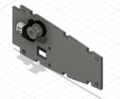
Vista isométrica el motor DAIICHI

Vista Lateral el motor DAIICHI

Modelado aproximado de motor DAIICHI vista frontal

Modelado aproximado de motor DAIICHI vista isométrica




Análisis Mecánico
Para esta prótesis se busca inicialmente dos tipos de movimientos, el primero el movimiento del codo.... y en segundo lugar el movimiento de los dedos generando dos tipos de agarre.....

Movimiento que se busca generar por el codo diseñado en la prótesis

Movimiento tip de los dedos para generar un primer agarre
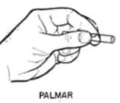
Movimiento palmar los dedos para generar un segundo agarre


Para la ejecución de los movimientos presentados anteriormente se utilizan diferentes motores y adecuaciones como se muestran a continuación:
- Movimiento de flexión y extensión del brazo:
Para el movimiento de flexion y extension se utiliza el servomotor Tower Pro MG 996R... con el fin de generar la fuerza suficiente para el movimiento del antebrazo, teniendo en cuenta su peso, ya que en el antebrazo es donde se adecua la mayor parte electrica, electronica y mecanica, ademas se busca generar la rapida ejecucion del movimiento...
- Movimiento Tip y palamar de los dedos para generar agarres:
Para la ejecucionn de lo movimientos de piza de la mano se utilizaron motoreductores debido a su alo torique y capacidad de generar compresion de los dedods, genrando la suficiente fuerza para levantar objetos de peso liviano, ademas de una velocidad buena para la ejecicion de los movimientos
-Tip: Para este movimiento se implemento un motoreductores.... el cual lleva en el eje un piñon linela y a su vez va unido a un piños de ... deintes el cual lleva una polea, en la cual se uniran los hilos que moveran los dedos pulgar, indice y corazon.
-Palmar: Para este movimiento se implementaron dos motoreductores, el primero es el motoreductor implementado en el movimiento tip pero adicionalmentre se implemento un mtoreductor el cual lleva en el eje un piñon linela y a su vez va unido a un piños de ... deintes el cual lleva una polea, en la cual se uniran los hilos que moveran los dedos anular y meñique de esta manera el movimiento generado sera de todos los dedos a la vez
Mano
Para el diseño de la mano se tuvo en cuenta que se pudieran realizar los movimientos (TIP y Palmar) de la mejor manera y que cumplan correctamente su función de agarre; por ello, se realizó un análisis de los movimientos con el fin de saber desde dónde se realizan, de qué manera se hacen y las partes involucradas en éste, posteriormente se definieron los requerimientos para cada movimiento (Tabla 1). Teniendo en cuenta lo anterior, se realizó una búsqueda de los posibles modelos que ayudaran a cumplir dichos requerimientos, de allí se presenta el primer prototipo de la mano que se obtuvo de https://www.thingiverse.com/thing:1679539.
Palma para la mano que se usara
Dedos de la mano que se usara


Cabe resaltar, que la muñeca no tendrá ningún tipo de movimiento y quedará fija en una misma posición al antebrazo.
Actividades
Marzo 2020
| Jueves 12 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Osorio | Caracteristicas del motor daiichi y modelado del motor | 3 Horas | 9 TS |
| Miercoles 11 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Modelado del socket y ajuste del antebrazo para acople de motores | 4 Horas | 12 TS |
| Martes 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Modelado del antebrazo y acople con el diseño del codo | 3 Horas 40 min | 11 TS |
| Valentina Osorio | Modelado antebrazo, organizar plataforma y subir diseños | 3 Horas 40 min | 11 TS |
| Lunes 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Modelado del codo para acople con el motor | 4 Horas | 12 TS |
| Valentina Osorio | Busqueda y caracterizaciòn del posible motor a usar para acople con el motor | 4 Horas | 12 TS |
| Viernes 06 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Modelado del antebrazo para acople de motores y ajuste de la muñeca, actualización de datos con respecto a la prótesis y modelos | 4 Horas | 12 TS |
| Miercoles 04 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Modelado del codo para acople de motor. | 4 Horas | 12 TS |
| Martes 3 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Modelado de la extremidad, acople hombre y placa | 5 Horas | 15 TS |
| Valentina Osorio | Modelado de la extremidad y acople motores | 4 Horas | 12 TS |
| Maria Jose | Modelado de la extremidad | 3 Horas | 9 TS |
| Lunes 2 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Modelado de la extremidad y el ajuste del codo | 4 Horas | 12 TS |
| Valentina Osorio | Modelado de la extremidad y el ajuste del codo | 4 Horas | 12 TS |
Febrero 2020
Reportes y TS
| Miercoles 26 | Descripción | Tiempo | TS |
|---|---|---|---|
| Manuela Mora | Modelado de la extremidad y el ajuste del codo | 4 Horas | 12 TS |
| Julián Medina | Modelado de la extremidad y el ajuste del codo | 4 Horas | 12 TS |
Diciembre 2019
Reportes y TS
| Martes 3 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Ajustes finales prótesis | 3 Horas | 9 TS |
| Juan Manuel Vargas | Ajustes finales prótesis | 3 Horas | 9 TS |
Noviembre 2019
Reportes y TS
| Martes 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Re impresión pieza de la mano | 3 Horas | 9 TS |
| Viernes 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Arreglo estético de la mano | 6 Horas | 18 TS |
| Jefersson Hernandez | Adecuación electrónica (regulador voltaje) | 6 Horas | 18 TS |
| Miercoles 13 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Union de piezas mano mediante cañamo | 6 Horas | 18 TS |
| Jefersson Hernandez | Adecuacion electronica (regulador voltaje) | 6 Horas | 18 TS |
| Martes 12 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Pulir y lijar piezas de la mano dedos | 6 Horas | 18 TS |
| Jefersson Hernandez | Pulir y lijar la muñeca, adecuación de baterías | 6 Horas | 18 TS |
| Jueves 7 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión de dedos y uniones dedos | 4 Horas | 12 TS |
| Miercoles 6 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jefersson Hernandez | Modificación muñeca e impresión muñeca | 7 Horas | 21 TS |
| Luna León | Modificaciones de mano | 7 Horas | 21 TS |
| Mario | Clasificación de señales y redes neuronales | 2 horas | 6 TS |
| martes 5 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión piezas de la mano | 5 Horas | 15 TS |
| Viernes 01 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jefersson Hernandez | Modificaciones diseño de muñeca, ya que la realizada presentaba complicaciones | 5 Horas | 15 TS |
Octubre 2019
Reportes y TS
| Miercoles 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jefersson Hernandez | Modificaciones en piñones y parte mecánica del antebrazo e impresión piezas de la mano | 8 Horas | 24 TS |
| Luna León | Impresión piezas de la mano | 6 Horas | 18 TS |
| Lunes 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión piezas de la mano | 5 Horas | 15 TS |
| Miércoles 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión dedos de la mano | 4 Horas | 12 TS |
| Jefersson Hernandez | Adecuación piñones y reimpresión de pieza centro de antebrazo | 6 Horas | 18 TS |
| Martes 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión dedos de la mano | 4 Horas | 12 TS |
| Jefersson Hernandez | Adecuación piñones y reimpresión de pieza centro de antebrazo | 5 Horas | 15 TS |
| Viernes 18 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión dedos de la mano | 4 Horas | 12 TS |
| Jueves 17 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jefersson Hernandez | Impresión pieza centro del antebrazo, mejoramiento piezas impresas y adecuacion de motores y piñones | 6 Horas | 18 TS |
| Miercoles 16 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión piezas mano | 4 Horas | 12 TS |
| Jefersson Hernandez | Impresión segunda parte antebrazo, mantenimiento y mejoramiento de la impresion | 6 Horas | 18 TS |
| Martes 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión piezas mano (falanges) | 4 Horas | 12 TS |
| Viernes 11 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión piezas mano | 4 Horas | 12 TS |
| Jueves 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión piezas mano | 4 Horas | 12 TS |
| Lunes 07 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión piezas mano | 4 Horas | 12 TS |
| Viernes 04 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión piezas antebrazo | 4 Horas | 12 TS |
| Jueves 03 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jefersson Hernandez | Modificaciones y ajustes finales del antebrazo | 6 Horas | 18 TS |
| Luna León | Modificación final de la mano | 6 Horas | 18 TS |
| Miércoles 02 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jefersson Hernandez | Modificación y ajuste de antebrazo | 6 Horas | 18 TS |
| Luna León | Modificación de la mano | 6 Horas | 18 TS |
| Martes 01 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jefersson Hernandez | Finalizacion de modificacion y ajuste de muñeca a la prótesis e impresión del antebrazo | 6 Horas | 18 TS |
| Luna León | Modificación de la mano | 6 Horas | 18 TS |
Septiembre 2019
Reportes y TS
| Lunes 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jefersson Hernandez | Finalizacion de modificacion y ajuste de muñeca a la prótesis e intento de impresión del antebrazo | 6 Horas | 18 TS |
| Luna León | Modificación de la mano e intento de impresión del antebrazo | 6 Horas | 18 TS |
| Viernes 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jefersson Hernandez | Finalizacion de modificacion y ajuste de muñeca a la protesis te antebrazo e integracion de tematica a la protesis | 5 Horas | 15 TS |
comentarios: marcar a Julian pa definir un dia entre semana, proxima semana para una primera entrega el 3 de octubre si se puede.
| Miércoles 25 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión del socket | 3 Horas | 9 TS |
| Martes 24 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Modificación de socket e impresión de piezas del mismo | 6 Horas | 18 TS |
| Jeff | Modificación de muñeca para acople con antebrazo, modificación de antebrazo para ubicacion de segunda bateria | 6 Horas | 18 TS |
| Lunes 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Modificación de socket e impresión de piezas del mismo | 6 Horas | 18 TS |
| Viernes 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff | Intento de impresión del socket, no se pudo ya que no se logró arreglar un problema de impresión | 3 Horas | 9 TS |
| Jueves 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Modificaciones del diseño de la mano | 6 Horas | 18 TS |
| Jeff | Diseño de piezas para el posicionamiento de actuadores y diseño de muñeca | 6 Horas | 18 TS |
| Miércoles 18 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Definición de actuadores. Rediseño y ajuste del socket para una mejor funcionalidad | 6 Horas | 18 TS |
| Jeff | Impresión de pieza del antebrazo. Diseño de piezas para el posicionamiento de actuadores | 6 Horas | 18 TS |
| Martes 17 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Rediseño y ajuste del socket para una mejor funcionalidad | 6 Horas | 18 TS |
| Jeff | Últimos arreglos del diseño del antebrazo y diseño de piezas para el posicionamiento de actuadores | 6 Horas | 18 TS |
| Lunes 16 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión de pieza preeliminar del socket | 6 Horas | 18 TS |
| Jeff | Últimos arreglos del diseño del antebrazo | 6 Horas | 18 TS |
| Sábado 14 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Esperando la cita con Julian al lab para escanear a Matias | 2 Horas | 6 TS |
| DIego Chacón | Escaner de Matias Días después | 2 Horas | 6 TS |
Comentarios: marcar a Julian pa definir un dia entre semana, hasta tarde para una primera entrega antes el 28 de septiembre. Julian propone el jueves 26 en la noche.
| Jueves 12 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff | Modificacion preeliminar de mano | 6 Horas | 18 TS |
| Luna León | Modificacion preeliminar de mano | 6 Horas | 18 TS |
| Martes 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff | Realización de Perforaciones para adecuación de la pieza de soporte para el servomotor | 3 Horas | 9 TS |
| Luna León | Rediseño de las piezas de unión del socket al antebrazo | 3 Horas | 9 TS |
| Lunes 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff | Realización de Perforaciones para adecuación de la pieza de soporte para el servomotor | 6 Horas | 18 TS |
| Luna León | Rediseño de las piezas de unión del socket al antebrazo | 6 Horas | 18 TS |
| Jueves 5 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff | Realización de Perforaciones para adecuación de servomotor, junto con sus tornillos y tuercas; se realiza la adecuación del eje de movimiento de la prótesis | 6 Horas | 18 TS |
| Miercoles 4 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff y Luna León | Modificacion de socket para unirlo con el antebrazo | 6 Horas | 18 TS |
| Martes 3 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff y Luna León | Adecuación servomotor y batería prótesis antebrazo en modelo de fussion 360 | 6 Horas | 18 TS |
| Lunes 2 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff | Pruebas adquisición de la señal mediante circuito propuesto en ("Real-Time Pattern Recognition for prosthetic hand") por mabloc | 4 Horas | 12 TS |
| Luna León | Pruebas adquisición de la señal mediante circuito propuesto en ( "Real-Time Pattern Recognition for prosthetic hand") por mabloc | 6 Horas | 18 TS |
| mabloc | Pruebas adquisición de la señal mediante circuito propuesto en ("Real-Time Pattern Recognition for prosthetic hand") por mabloc | 6 Horas | 18 TS |

Pruebas circuito de adquisición utilizado en ("Real-Time Pattern Recognition for prosthetic hand") por mabloc

Agosto 2019
Reportes y TS
| Jueves 29 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff | Modelamiento antebrazo prótesis | 6 Horas | 18 TS |
| Luna León | Modelamiento socket | 3 Horas | 9 TS |
| Miércoles 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff y Luna León | Modelamiento socket y antebrazo prótesis | 3 Horas | 9 TS |
| Luna León mabloc | Investigación y charla sobre el trabajo de Mario a cerca de la caracterización de señales EMG para una posible implementación en la prótesis | 3 Horas | 9 TS |
| Martes 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff y Luna León | Comienzo del modelamiento de prótesis | 3 Horas | 9 TS |
| viernes 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Investigación sobre el tipo de socket adecuado para Matias | 3h | 9 TS |
TODO: Se realizo investigación acerca del modelo de socket mas apropiado para Matias dependiendo su tipo de amputación; todo esto con el fin de dar inicio a el modelado de la protesis
| jueves 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Lectura articulo de clasificación de señales de EMG de Matias, identificación de parámetros y metodología utilizada | 3h | 9 TS |
| Jefferson Hernández | Lectura articulo de clasificación de señales de EMG de Matias, identificación de paramatros y metodologia utilizada | 3h | 9 TS |
TODO: Se realizo la lectura del articulo "Real-Time Pattern Recognition for prosthetic hand" de Mario A. Benitez (mabloc), para identificar metodologías parámetros, características, tipos de movimiento y red neuronal utilizada para la calificación de movimientos a partir de señales de EMG
| miercoles 21 | Descripción | Tiempo | TS
|
|---|---|---|---|
| Jefferson Hernández | Contacto con Mario A. Benitez- (mabloc) (autor articulo "Real-Time Pattern Recognition for prosthetic hand") | 3h | 9 TS |
TODO: Se realizo el contacto con Mario A. Benitez, para obtencion de informacion acerca de la calsificacion se señales de EMG de matias
| Sabado 10 | Descripción | Tiempo | TS
|
|---|---|---|---|
| Fabian Bustos | Asistencia a evaluación de Matías | 3h | 9 TS |
| PI RAT | Asistencia a evaluación de Matías | 3h | 9 TS |
| Diego Chacon | Asistencia a evaluación de Matías | 3h | 9 TS |
TODO: Se empezara el proceso de diseño de la protesis
abril 2019
Fisioterapia:
- Lorena13
- Horas: dos
- Fecha: 13 de abril 2019
- validado el ? abril 2019
Psycologia:
- Andres?
- Horas: dos
- Fecha: 13 de abril 2019
- validado el ? abril 2019
Ingeneria:
- Juan Manuel Vargas
- Horas: 3
- Fecha: 13 de abril 2019
- validado el ? abril 2019