| Jefes de Proyecto
|
Desarrolladores
|
Contabilidad
|
|
|
|
| Componente
|
Valor Unitario
|
Cant
|
Valor Total
|
Comentario
|
| Placa de alimentación (Power Supply)
|
10600 COP
|
1
|
10600 COP
|
Detalles en Contenido
|
| Placa de sensores (Sensors Board)
|
13000 COP
|
1
|
13000 COP
|
Detalles en Contenido
|
| Placa de motores(Motor Shield)
|
29000 COP
|
1
|
29000 COP
|
Detalles en Contenido
|
| Total
|
|
|
52.600 COP
|
|
Exiii-hackberry
Diseño Prótesis.
Esta prótesis es un prototipo establecido el cual se quiere implementar de tal manera en que este brazo se pueda presentar en diferentes exposiciones o charlas de la fundación. Info: https://github.com/mission-arm/HACKberry
Ensamble de la prótesis.
Este ensamble se realizo con ayuda de diferentes videos y blogs donde ya han trabajado esta prótesis.
info: https://myhumankit.org/en/tutoriels/myoelectric-exiii-hand/ & http://exiii-hackberry.com/forums/topic/assembling/
Componentes de la prótesis
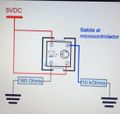
Para este tipo de prótesis, como sensor se utilizo un CNY70 el cual es un sensor de infrarrojo, el cual detecta objetos a determinado rango de distancia, dependiendo de la configuración de las resistencias genera un rango de detección, en este caso se utilizaron dos resistencias una de 47k ohm y otra de 330 ohm. Se utilizaron 2 servomotores MG90S, uno de ellos se encargaba de generar la flexión de los dedos exteriores (medio, anular y meñique) y el otro se encarga de cambiar de posición el dedo pulgar. Para el dedo índice se utilizo un SG-5010 para poder generar un movimiento y un agarre con mas fuerza. Como microcontrolador que se utilizo para generar la programación de los motores fue un ARDUINO NANO.
Configuración de infrarrojo.
Los motores estarán conectados 3 pines digitales de Arduino en este caso se utilizaran los pines 8, 9 y 10. La señal que se enviara a estos pines dependerá del dato tomado por el sensor el cual estará en un pin análogo del Arduino que en este caso usaremos el A3, por otro lado los pulsadores están conectados a dos pines digitales en este caso usaremos el pin 3 y 4, donde en el pin 3 estará ubicado el pulsador que genera la suma en los modos para poder aumentar el modo y en el pin 4 estará el pulsador encargado de restar en el modo en que se encuentre para así poder devolverse al modo anterior en casi de necesitarlo, estos pulsadores requieren una resistencia para poder protegerlos y proteger el circuito, pero para ahorrar espacio y componentes para esto se puede utilizar las resistencias internas que tiene el Arduino.
Montaje de componentes y circuito.
Para este proceso el circuito fue pasado de una protoboard a una baquela, donde se soldaron las diferentes ruta para el paso de la corriente y poder completar el circuito, en esta baquela encontramos los dos pulsadores para subir y bajar los modos programados con anterioridad. El sensor esta en la parte que simula ser el antebrazo, donde descansara el muñón del paciente y al acercarlo al sensor este activara los motores para generar el movimiento de la mano, el circuito será alimentado con una power bank la cual estará ubicada ya sea en el brazo del paciente.
Circuito Final en Baquela
Protesis Hackberry parte externa del brazo y dorsal de la mano.
Protesis Hackberry parte interna del brazo y palma de la mano.
Explicación de funcionamiento
La mano Hackberry, tiene tres de sus 5 dedos unidos (Meñique, anular y medio), los cuales serán movidos por un servomotor, los otros dos dedos eran independientes y así mismo seria su movimiento, este dependerá del estado del sensor, si el beneficiario hace fuerza o acerca el muñón al sensor este captara determinados datos que son convertidos a los movimientos angulares de los motores, estos irán de 80° (dedos estirados) a 180° (dedos recogidos) en el caso de los 3 dedos, el servomotor del dedo índice se moverá de 10°(dedos estirados) a 170° (dedos recogidos) y el dedo pulgar se moverá de 80° (dedos estirados) a 180° (dedos recogidos). Esta mano cuenta con 4 modos:
* Primer modo y modo inicial el dedo oponible queda abierto en la mano y los demás dedos se flexionaran con la acción del beneficiario.
*Segundo modo el dedo pulgar pasa al interior de la mano y los 4 restantes flexionan generando un agarre de pinza entre el índice y el pulgar
*Tercer modo los dedos que están conectados y el dedo pulgar se estarán flexionados, el único dedo en movimiento será el índice el cual genera un
agarre de pinza pero sin los 3 dedos restantes.
*Cuarto modo es similar, se genera el mismo agarra de pinza entre el pulgar e índice pero
con los dedos restantes estarán estirados.
Cabe resaltar que en esta prótesis en dedo pulgar tiene un movimiento mecánico, el cual se genera
oprimiendo el botón que esta en la unión de lo que podríamos llamar falanges, esto para abrir el dedo y al flexionar el dedo índice este pueda
continuar su movimiento y no realizar agarre de pinza, ese movimiento le podría ayudar a coger cualquier forma cilíndrica o esférica. Estos
modos estarán controlados con dos pulsadores donde uno de ellos (Blanco) es para aumentar el modo, y el negro que se encargara de restar el
modo en el que este, esos serán regulados por el beneficiario dependiendo del requerimiento que tenga.
Nueva prótesis 2
El diseño de esta prótesis se puede encontrar a continuación. https://www.thingiverse.com/thing:1294517
Donde se tomo la palma y la tapa de esta prótesis, se edita para poder utilizar otros componentes que puedan ser locales, se usara cuerda de cáñamo para poder generar la flexión del dedo, este hilo será halado por servomotores, donde se utilizaron 3 exactamente, uno de ellos será el encargado de mover el dedo meñique y el anular en conjunto, otro moverá los dedos índice y medio de manera sincronizada y el ultimo será el encargado de generar el movimiento del dedo pulgar. Para accionar los servomotores se utiliza un CNY70 este para poder detectar el movimiento muscular y con esto poder generar la flexión de los dedos, para esto se debe tener en cuenta la configuración de las resistencias a utilizar debido a que de estas van a depender nuestro rango de medición.
Nuevo mecanismo
Para este se tomo el mismo circuito de la Hackberry pero teniendo en cuenta que solo se utilizarían dos motores, los cuales uno de ellos (pulgar) será controlado con un pulsador conectado al pin digital 4, y el dedo índice actuara dependiendo del estimulo del sensor el cual estará conectado al pin análogo 4, la configuración del sensor será igual a la expuesta anteriormente. se realizaran las modificaciones al diseño para poder generar mejor en movimiento y poder avanzar en la investigación de un nuevo mecanismo para las prótesis, los motores están conectados a los pines digitales 8,9 respectivamente.
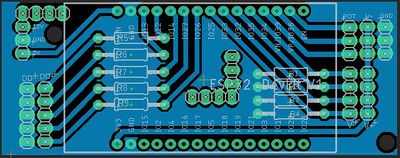
PCB Prótesis
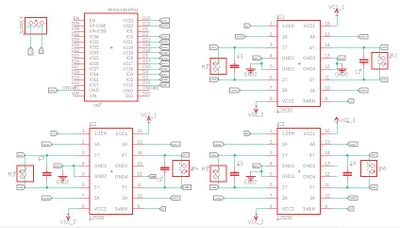
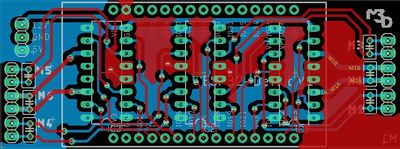
Estructura general del sistema electrónico
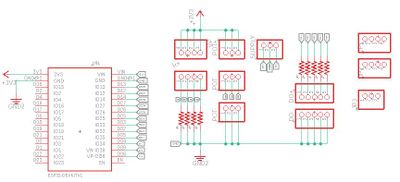
Los circuitos impresos fueron diseñados para funcionar como Shields para la tarjeta de desarrollo ESP32 DevKit V1, esto con el fin de minimizar el espacio total que ocupa el sistema electrónico dentro de la prótesis. Se diseñó tres PCB para el cumplimiento de procesos generales:
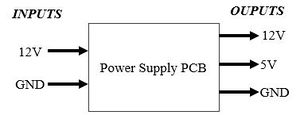
- Power Supply Board: Esta placa fue diseñada para dar los voltajes de alimentación que requiere el sistema electrónico para funcionar correctamente.
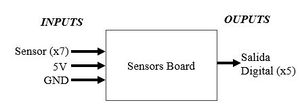
- Sensors Board : Esta placa permite la lectura analógica de sensores y la escritura de variables digitales.
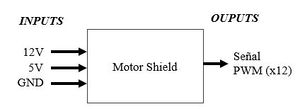
- Motor Shield : Esta placa permite la administración de potencia y control de motorreductores .
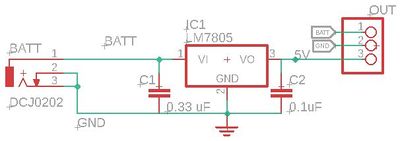
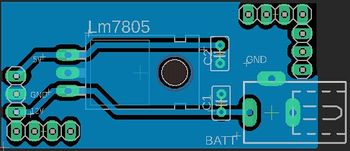
Placa de alimentación (Power Supply)
Esta placa es un circuito de regulación de voltaje mediante el componente LM7805, dando como salida 5V y 12V necesarios para el funcionamiento de la tarjeta de desarrollo, integrados, sensores ,salidas digitales, y motorreductores.
| Componente
|
Descripción
|
Precio
|
| LM7805 |
Regulador de voltaje |
1500 COP
|
| JACK DC |
Conector hembra 2.5 x 5.5 mm |
2500 COP
|
| C104 |
Condensador cerámico 0.1uF (x2) |
100 COP
|
| Disipador |
El mas pequeño, para LM7805 |
500 COP
|
| Pin Header |
Regleta macho macho |
2000 COP
|
| PCB |
Fabricación del circuito en Baquela |
4000 COP
|
|
TOTAL |
10600 COP
|
Placa de sensores (Sensors Board)
Esta placa consiste en una extensión de los pines de la tarjeta de desarrollo, permitiendo la lectura de hasta 4 sensores de presión resistivos mediante divisores de tensión , lectura de hasta 3 potenciómetros, además, cuenta con la posibilidad de utilizar 5 puertos como entradas o salidas digitales, por ejemplo, leer estados de pulsadores, encender o apagar LEDS, entre otros. Esta placa se conecta directamente con la placa Power Supply y con la placa Motor Shield.
| Componente
|
Descripción
|
Precio
|
| Pin Header |
M/M y M/H largos |
4000 COP
|
| Resistencias |
10k Ohms (x4) y 5k Ohms (x4) |
1000 COP
|
| PCB |
Fabricación del circuito en Baquela |
8000 COP
|
|
TOTAL |
13000 COP
|
Placa de motores(Motor Shield)
Esta placa permite el control del sentido y velocidad de giro de hasta 6 motorreductores, con una entrega máxima de corriente de 600 mA por motor. Para esto, se utiliza el integrado L293D.
| Componente
|
Descripción
|
Precio
|
| Pin Header |
M/M y M/H largos |
4000 COP
|
| C104 |
Capacitor 0.1uF (x6) |
600 COP
|
| Socket |
DIP de 16 pines (x3) |
900 COP
|
| L293 |
Driver para motores DC (x3) |
9000 COP
|
| PCB |
Fabricación del circuito en Baquela |
14000 COP
|
| Cable |
Para soldar puentes |
500 COP
|
|
TOTAL |
29000 COP
|
| Componente
|
Imagen
|
Componente
|
Imagen
|
Componente
|
Imagen
|
Componente
|
Imagen
|
Componente
|
Imagen
|
| Header M/M |
 |
LM7805 |
 |
Jack DC |
 |
C104 |
 |
Disipador |

|
| Header M/F |
 |
Resistencia |
 |
L293D |
 |
Socket |
 |
ESP32 |

|
Lista de pines usados: ESP32 Devkit V1
| GPIO
|
Nombre
|
I/O
|
Descripción
|
GPIO
|
Nombre
|
I/O
|
Descripción
|
| 13 |
LED2 |
I/O |
Entrada o salida Digital |
23 |
SM1A |
O |
Señal PWM Motor 1 pin A
|
| 12 |
LED1 |
I/O |
Entrada o salida Digital |
22 |
SM1B |
O |
Señal PWM Motor 1 pin B
|
| 14 |
LED3 |
I/O |
Entrada o salida Digital |
3 |
SM2A |
O |
Señal PWM Motor 2 pin A
|
| 27 |
LED4 |
I/O |
Entrada o salida Digital |
21 |
SM2B |
O |
Señal PWM Motor 2 pin B
|
| 26 |
LED5 |
I/O |
Entrada o salida Digital |
19 |
SM3A |
O |
Señal PWM motor 3 pin A
|
| 25 |
SG4 |
I |
Lectura de sensor 4 |
18 |
SM3B |
O |
Señal PWM motor 3 pin B
|
| 33 |
SG3 |
I |
Lectura de sensor 3 |
5 |
SM4B |
O |
Señal PWM motor 4 pin B
|
| 32 |
SG2 |
I |
Lectura de sensor 2 |
17 |
SM4A |
O |
Señal PWM motor 4 pin A
|
| 35 |
SG1 |
I |
Lectura de sensor 1 |
16 |
SM5B |
O |
Señal PWM motor 5 pin B
|
| 34 |
SP1 |
I |
Lectura de Pot 1 |
4 |
SM5A |
O |
Señal PWM motor 5 pin A
|
| 39 |
SP2 |
I |
Lectura de Pot 2 |
2 |
SM6B |
O |
Señal PWM motor 6 pin B
|
| 36 |
SP3 |
I |
Lectura de Pot 3 |
15 |
SM6A |
O |
Señal PWM motor 6 pin A
|
Diseño prótesis
Video Tutorial
En este espacio encontramos los conceptos principales y los detalles de planeación para la producción videográfica de la Fundación M3D, orientada especificamente al tema de diseño y fabricación de prótesis mioelectrica para miembro superior.
Este curso va dirigido a personas con conocimientos básicos en electrónica, mecánica y fabricación digital, lo cual aplica para estudiantes de carreras afines a Ing. Biomédica,
Ing. Mecatrónica, etc. El curso esta orientado a soluciones a nivel transradial, la posibilidad de generar una solución de prótesis mioeléctrica depende del espacio que tengamos disponible para alojar los sistemas funcionales eléctricos y mecánicos necesarios para hacerla util y confiable para el usuario.
Temas a documentar en video
ETAPA 1 (Diseño de la Solución)
-Factores Decisivos en el Diseño: (Fabian)
-Toma de medidas y scan 3D // http://humanproportions.com/
-Administración del espacio: Tener en cuenta las medidas tomadas en la evaluación antropomórfica
-Ergonomía : Interacción entre el usuario y el producto. Ergonomics and Design
-Biomecánica del Cuerpo Humano: El cuerpo humano como sistema biologico mecánico
-Analisis Mecánico de la Mano:
-Usabilidad : la manera en que se quita y se pone la prótesis, limpieza, mantenimiento)
-Reemplazo de hilos de tracción
-Peso de la Prótesis
-Calculo del Peso en Software de Diseño
-Superficie de Contacto
-Factores de Seguridad
-Posición de la batería
-Puntos de Giro y Conexiones Eléctricas Móviles
-Procedimientos de uso peligrosos
-Procedimientos en caso de falla
-Materiales de Contacto Directo con la Piel
-Temperatura y Sudoración
-Limpieza
ETAPA 2 (Fabricación y Ensamble Mecánico)
-Proceso de Impresión 3D
-Tolerancias en las Medidas
-Porcentajes de Relleno
-Material de Soporte
-Materiales FDM en Biomecánica
-Materiales Rigidos
-Materiales Flexibles
ETAPA 3 (Integración de Sistema Electrónico)
-Electrónica Basica y Buenas Practicas de Ensamble
-Tipos de Cable
-Empalme de Cables
-Administración de instalaciones con cableado
Soldadura
-Sensores -Introducción
-Tipos de sensores usados en prótesis
-Sensor Electromiográfico
-Sensor Myoware
-Sensor Myo
-Sensor Resistivo de Presión
-Sensor Infrarrojo de Proximidad
-Captura y Visualización de Señales
-Obtención de Señales por Lectura de Voltaje
-Obtención de Señales por Lectura de Corriente
-Obtención de Señales por Transferencia de Datos
-Resolución de Muestreo
-Frecuencia de Muestreo (Sampling Rate)
-Filtrado y Proceso de Señales
-Envolvente de Señal (Extracción)
-Filtro Promedio de X Muestras
-Filtro Promedio Ponderado de X Muestras
-Actuadores -Introducción
-Servo-motores
-Motores DC
-Tiempo de Ejecución de movimientos
-Posiciones de reposo/acción
-Fuentes de alimentación -Introducción
-Baterias
-Tipos de Baterías
-Baterias Extraibles
-Baterias Fijas
-Puerto de carga
-Cargadores y Circuitos de Carga
ETAPA 4 (Programación)
-Microcontroladores -Introducción
-Dispositivos Electrónicos programables
-Tarjetas Arduino
-Tarjetas ESP32(conectividad con aplicativo)
-Programación de Microcontroladores
-Estimación de variables: numero de dedos independientes
-PseudoCódigo
-Aalisis de Ejecución de Programa
-Utilización de Retardos
-Multitasking en Arduino
-Interfaz de Usuario -Introducción
-Interfaz de Usuario (UI)
-Experiencia de Usuario (UX) : La interacción entre el usuario y el producto.
-Botones
-Indicador LED RGB :indicador visual del estado de la pròtesis para uso de manera segura.
-Conexión mediante aplicativo PC/Android : Conectividad inhalambrica para calibración, control de movimientos y detección de fallas.
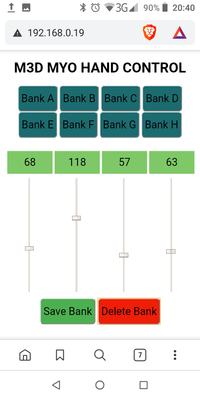
Aplicativo de Prótesis en Telefono Móvil
El avance más importante de esta prótesis es la implementación de una interfaz gráfica siempre accesible via wi-fi desde un ordenador o telefono conectado a la red, util para mover los actuadores y obtener lectura de los sensores en tiempo real, esto actúa de este modo para detectar fallas o errores en los motores, los mecanismos y a veces los programas del chip. En segundo plano a este aplicativo sirve para acceder a las posiciones guardados en la memoria, que son elegidos por el usuario con un boton selector y ejecutados proporcionalmente por el sensor de actividad muscular, la interfaz web tiene acceso directo a la memoria de posiciones del programa, asi podemos programar movimientos y ejecutarlos de manera agil y personalizada.
Codigo ESP32 Hand Server v1.0
28/03/2021
Se ha iniciado la conceptualización de una mano protésica capaz de escribir utilizando lapiz y papel, la caligrafía es un arte manual tradicional que representa simbolos sobre una superficie, estos simbolos pueden ser igualmente generados por un dispositivo electro-mecánico que a la vez tenga la forma de mano protésica. Se toma como base el mecanismo de un plotter XY o máquina de control numérico, que tomara las fuentes seleccionadas por la aplicación y ejecutará movimientos coordinados para desplazar la punta de un lapiz sobre un papel y dar como resultado una escritura legible. La estrategia inicial es posicionar la mano en el sitio donde se quiere la letra y mediante un comando de voz la mano ejecutara movimientos para dibujarla en ese lugar, posterior a esto se desplaza la mano/plotter y se le dicta la siguiente letra para construir letra a letra una palabra.
Diferencias Entre Caligrafia Lettering y Tipografia
How to use a Hero Arm: Writing
Floppy Drive CNC Pen Plotter
Aplicativo de Prótesis en PC
Concepto Aplicativo Selección Fuentes (Mano para escritura)
Tipos de sensores usados en prótesis
En esta sección vamos a tratar un tema relacionado a los tipos de sensores que podemos utilizar en diferentes casos, para la captura de la actividad muscular del usuario, lo que le permitirá controlar su prótesis y ejecutar movimientos funcionales, los sensores aquí presentados son de tipo análogo y su salida es normalmente muestreada por el procesador con resolución de 12bits, es decir que la señal capturada se ubica entre 4096 niveles de voltaje, estos sensores entregan la señal de manera proporcional a la actividad detectada, esto nos da la oportunidad de generar movimientos muy naturales en las posiciones de la prótesis, si por el contrario la señal presentara valores absolutos de 0 y 1, la acción de los servo-motores puede ser brusca o dificil de manejar por el usuario.
Planeación
La selección del sensor apropiado y su localización en la prótesis es un detalle importante que debe ser evaluado en la etapa inicial del proceso de concepción de la solución, ya que en los diseños de las partes plasticas impresas se debe reservar el espacio adecuado para el sensor y su cableado, es importante declarar que posponer la elección del sensor para la etapa de ensamble puede dar lugar a modificaciones forzadas en las piezas y a una posible afectación en la parte estética de las mismas, igualmente si se decide utilizar el tipo de sensor el dia de la entrega de la prótesis, puede dar lugar a situaciones incomodas para el protesista y el usuario o incluso una entrega fallida debido a modificaciones importantes, una buena planeación desde el principio es la que define el exito o el fracaso en el ensamble y en la entrega final de la prótesis.
Sensor Resistivo de Presión
Sensor Infrarrojo de Proximidad
Este tipo de sensor consiste en un modulo que integra un diodo LED emisor de luz infrarroja y un fototransistor receptor que deja pasar hacia el microcontrolador los niveles de voltajes de señal en función de la cantidad de luz reflejada por la superficie de la piel hacia el sensor ubicado en el socket, por este motivo el sensor va ubicado en un punto fijo del socket donde exista un cambio importante en la forma de la extremidad debido a la actividad muscular efectuada por el usuario.
Los sensores de proximidad por infrarrojos que se encuentran en el mercado tienen normalmente una aplicación en la industria para la medición de distancias y detección de presencia de objetos sin contacto, las especificaciones de distancia minima de los sensores comerciales promedio no se ajustan completamente a nuestra aplicación, por este motivo vamos a modificar un sensor de tipo barrera infrarroja para que funcione como medidor de proximidad para un rango de distancias entre 0 y 5mm, este sensor modificado representa una solución compacta, no invasiva y de costo reducido si se compara con los sensores comerciales comunes.
Sensor de Proximidad con Salida Digital de 16bit
Sensor de Proximidad Análogo (Impresora de Papel)
Sensor IR Tipo Herradura Análogo (A modificar)
Actividades
Agosto 2021
| viernes 13 de agosto de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Vélez |
se acoplo el pulgar al diseño previo, sin embargo aun se esta evaluando dicho diseño ya que pueden haber complicaciones con el motor que mueva el pulgar |
6 Horas |
18
|
| jueves 12 de agosto de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Vélez |
se ensamblo finalmente los motores turcas y tornillos que comprender el mecanismo base del la generación de movimiento utilizando AUTODESK INVENTOR |
6 Horas |
18
|
| miercoles 11 de agosto de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Vélez |
Se inicio con el diseño de tornillos y tuercas, los cuales son elementos fundamentales a la hora de aplicar movimiento en los dedos por medio de los motores |
6 Horas |
18
|
| martes 10 de agosto de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Vélez |
se realizo el ensamble del dedo índice en el ensamble de los 3 dedos en Inventor y se empezó a diseñar como iría acoplado el pulgar en el diseño |
6 Horas |
18
|
| lunes 9 de agosto de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Vélez |
algunas piezas presentaron mucha fragilidad al momento del ensamblar y se corrigieron espesores y también se busco unir piezas iguales en una sola pieza para facilitar el ensamble y aportar mas resistencia a las piezas. |
6 Horas |
18
|
| viernes 6 de agosto de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Vélez |
se trabajo en el ensamble del meñique anular y corazón con mecanismo de movimiento. |
6 Horas |
18
|
| jueves 5 de agosto de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Vélez |
se trabajo en el ensamble del meñique anular y corazón con mecanismo de movimiento. |
6 Horas |
18
|
| miércoles 4 de agosto de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Vélez |
se diseño el grip y almuhadillas del los dedos |
6 Horas |
18
|
| martes 3 de agosto de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Vélez |
se trabajo en el diseño del mecanismo sin fin-corona que moverá los distintos dedos de la prótesis. |
6 Horas |
18
|
| lunes 2 de agosto de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Vélez |
se realizo las distintas piezas que serán almohadillas para mejorar el agarra de la mano. |
6 Horas |
18
|
Julio 2021
| viernes 30 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Vélez |
se continuo puliendo detalles del ensamble de los 3 dedos (corazón, anular y meñique) . |
6 Horas |
18
|
| jueves 29 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Vélez |
se finalizo el ensamble en CAD de el dedo índice, anular y meñique. |
6 Horas |
18
|
| Miércoles 28 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Vélez |
se empezó con el diseño 3D del resto de la mano contemplando el mismo mecanismo para los dedos a excepción del pulgar. |
6 Horas |
18
|
| Martes 27 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Velez |
Se realizaron las ultima modificaciones para asegurar la flexión y extensión de un solo dedo de 1 grado de libertad y se verifico por medio del ensamble e impresión 3D. |
6 Horas |
18
|
| lunes 26 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Velez |
Se inicio la implementación de una control PI en el motor para controlar su posición angular. |
6 Horas |
18
|
| viernes 23 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Velez |
se verificó la correcta medición de la velocidad del motor por medio del encoder al enviar distintas señales de control sin aun aplicar un control en el motor. |
6 Horas |
18
|
| jueves 22 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Velez |
A través de arduino se logro sensar correctamente la posición angular de un encoder el cual será útil para realizar el control de posición en futuras aplicaciones. |
6 Horas |
18
|
| miercoles 21 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Velez |
Se verificó el funcionamiento de reguladores y puente h que controlaran el motor, a su vez se comprar distintos elementos que harán parte del diseño final. |
6 Horas |
18
|
| martes 20 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Velez |
Se empezaron a hacer pruebas con el motorreductor con el fin de implementarlo en futuras prótesis con el objetivo de generar mas fuerza en el agarre de la mano. |
6 Horas |
18
|
| Miercoles 20 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Juan González |
Se replicó el funcionamiento de la prótesis con el sensor usando múltiples motores teniendo en cuenta la documentación dada. Después de esto, se montó nuevamente la prótesis Andrés Camilo Sánchez pero con el control externo, iniciando el montaje en protoboard con Drivers L293D |
7 Horas |
21
|
| lunes 19 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Juan González |
Se replico el funcionamiento del sensor de prótesis Erick con la finalidad de poder implementarlo nuevamente en otros modelos de prótesis. Posterior a la implementación con los servomotores, se cargó el código al arduino. A diferencia de la documentación dada, la resistencia pull-down del sensor infrarojo debe ser de 60k. Se adelantó la documentación completa del sensor, su implementación y su uso. Después de eso, se empezó a modificar la prótesis Andrés Camilo Sánchez para poner la prótesis a funcionar con el uso del sensor (ya que también implementa el modelo del sensor infrarojo), en el procesos se arreglaron algunas cosas de la electrónica que estaban dañadas. |
7 Horas |
21
|
| lunes 19 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Velez |
se realizo el primer ensamble del nuevo prototipo sin embargo se detectaron algunas fallas en espesores que se tednran en cuenta para futuras impresiones. |
6 Horas |
18
|
| viernes 16 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Velez |
puesto que se evidenci09 algunas fallas en el funcionamientos de prototipos anteriores se diseño un mecanismo de 3 eslabones con un grado de libertad el cual componen los 3 falanges de cada dedo, se utilizó información de internet para su diseño; ya esta listo para imprimir y realizar prueba de flexión y extensión manual. |
6 Horas |
18
|
| jueves 15 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Velez |
se ensamblo el diseño en el cual se probo el funcionamiento del yugo escoses utilizando un servomotor, sin embargo aun no se consigue buenos resultado para la flexión y extensión del ultimo falange del dedo |
6 Horas |
18
|
| miercoles 14 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Velez |
se realizaron modificaciones al prototipo del dedo y se inicio con el nuevo ensamble, para posteriormente iniciar ya con el diseño completo de la mano |
6 Horas |
18
|
| viernes 14 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Juan González |
Dado el sensor infrarojo dado, se encontró la datasheet en https://www.vishay.com/docs/83751/cny70.pdf. Se hizo un registro de datos y se comprobó el funcionamiento del sensor. Se descargó en el PC el IDE de Arduino y se configuró el driver para el MEGA 2560. Para trabajar con las señales se descargó python 3.9 en el pc |
6 Horas |
18
|
| Lunes 12 julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Juan González |
Inducción |
1 Hora |
3
|
| viernes 9 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Velez |
a partir de las fallas encontradas en el primer ensamble se rediseñaron algunas piezas y se verificó el funcionamiento a través de la simulación en inventor |
6 Horas |
18
|
| jueves 8 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Velez |
Se ensabló el prototipo simulado con el fin de encontrar fallas o diseñar mejoras en el mecanismo |
6 Horas |
18
|
| miercoles 7 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Velez |
se verificaron toleracias y dimensiones del dedo por medio de simulación en invetor |
6 Horas |
18
|
| martes 6 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Velez |
se realizaron las primeras fases de diseño para una prótesis de movimiento sin el uso de cáñamo para el movimiento de la falange base |
6 Horas |
18
|
| viernes 2 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Vélez |
se empezó el modelado 3D en inventor respetando restricciones de diseño. |
6 Horas |
18
|
| jueves 1 de julio de 2021
|
Descripción
|
Tiempo
|
TS
|
| Santiago Vélez |
SE comprendió los estándares y objetivos de diseño del practicante y su aporte en el periodo correspondiente a la fundación |
6 Horas |
18
|
mayo-junio 2021
| semana del 7 - 15 junio
|
Descripción
|
Tiempo
|
TS
|
| Alejandro Arévalo |
se termina diseño de dedos en agarre de pinza, se revisa circuito y ensamblan partes del prototipo |
40 Horas |
120
|
| semana del 14 mayo-2 junio
|
Descripción
|
Tiempo
|
TS
|
| Alejandro Arévalo |
Se requiere cambiar el mecanismo de funcionamiento delas prótesis para no utilizar mas hilos de cáñamo, se comienza a estandarizar un diseño mas mecánico en funcionamiento de los dedos |
60 Horas |
180
|
Abril 2021
| lunes 26
|
Descripción
|
Tiempo
|
TS
|
| Alejandro Arévalo |
Mantenimiento de impresora y comienzo con el diseño de la mano |
8 Horas |
24
|
| jueves 22
|
Descripción
|
Tiempo
|
TS
|
| Alejandro Arévalo |
montaje de sensor optico |
4 Horas |
12
|
| lunes 19
|
Descripción
|
Tiempo
|
TS
|
| Alejandro Arévalo |
documentación y comenzar con revisión de sensor infrarrojo en herradura |
8 Horas |
24
|
| viernes 16
|
Descripción
|
Tiempo
|
TS
|
| Alejandro Arévalo |
acople de hackberry para entrevista |
6 Horas |
18
|
| jueves 15
|
Descripción
|
Tiempo
|
TS
|
| Alejandro Arévalo |
Impresión de nuevos soportes y diseño de socket de Maria Jose |
4 Horas |
12
|
| miercoles 14
|
Descripción
|
Tiempo
|
TS
|
| Alejandro Arévalo |
Circuito en baquela e impresión de primer soporte |
8 Horas |
24
|
| Jueves 8
|
Descripción
|
Tiempo
|
TS
|
| Alejandro Arévalo |
diseño e impresión de palma de la mano |
4 Horas |
12
|
| Miércoles 7
|
Descripción
|
Tiempo
|
TS
|
| Alejandro Arévalo |
revisar alimentación y nueva protesis. |
8 Horas |
24
|
| Carlos Salazar |
Pruebas generales de motores, sensores y programación |
10 Horas |
30
|
| Martes 6
|
Descripción
|
Tiempo
|
TS
|
| Carlos Salazar |
Programación de la prótesis |
6 Horas |
18
|
Marzo 2021
| miercoles 31
|
Descripción
|
Tiempo
|
TS
|
| Alejandro Arévalo |
Ajuste de modos en la programación. |
8 Horas |
24
|
| Lunes 29
|
Descripción
|
Tiempo
|
TS
|
| Alejandro Arévalo |
Ensamble servo dedo oponible y revisar programación conjunta.. |
8 Horas |
24 TS
|
| Carlos Salazar |
Documentación general |
4 Horas |
12 TS
|
| Miércoles 24
|
Descripción
|
Tiempo
|
TS
|
| Alejandro Arévalo |
Ensamble primer servo. |
8 Horas |
24 TS
|
| Carlos Salazar |
Documentación general, Reajuste en el diseño de Power Supply y Mother Board |
4 Horas |
12 TS
|
| Martes 23
|
Descripción
|
Tiempo
|
TS
|
| Carlos Salazar |
Reajuste en el diseño de PCB Motor Shield |
4 Horas |
12 TS
|
| Sábado 20
|
Descripción
|
Tiempo
|
TS
|
| Carlos Salazar |
Creación de modelo CAD para componentes que no lo tuvieran |
4 Horas |
12 TS
|
| Viernes 19
|
Descripción
|
Tiempo
|
TS
|
| Carlos Salazar |
Modelo CAD de las PCB para verificación de dimensiones |
4 Horas |
12 TS
|
| Jueves 18
|
Descripción
|
Tiempo
|
TS
|
| Carlos Salazar |
Actualización de los diseños PCB con base en los errores encontrados |
4 Horas |
12 TS
|
| Miércoles 17
|
Descripción
|
Tiempo
|
TS
|
| Alejandro Arévalo |
Revisión bibliográfica para generar programación de motores |
8 Horas |
24 TS
|
| Carlos Salazar |
Inspección y ensamblaje de componentes en PCB Shield para motores |
4 Horas |
12 TS
|
| Martes 16
|
Descripción
|
Tiempo
|
TS
|
| Carlos Salazar |
Recogida de PCB Shield para motorreductores |
4 Horas |
12 TS
|
| Lunes 15
|
Descripción
|
Tiempo
|
TS
|
| Alejandro Arévalo |
grabación de los videos del ensamble |
8 Horas |
24 TS
|
| Carlos Salazar |
Ensamblaje de componentes principales en las PCB |
4 Horas |
12 TS
|
| Viernes 12
|
Descripción
|
Tiempo
|
TS
|
| Carlos Salazar |
Prueba de las PCB MotherBoard y SupplyBoard |
4 Horas |
12 TS
|
| Miércoles 10
|
Descripción
|
Tiempo
|
TS
|
| Alejandro Arévalo |
se trabaja en el sensor CNY70 infrarrojo para detectar el movimiento muscular. |
8 Horas |
24 TS
|
| Carlos Salazar |
Funcionamiento de los códigos en el motorreductor |
4 Horas |
12 TS
|
| Martes 9
|
Descripción
|
Tiempo
|
TS
|
| Carlos Salazar |
Creación de funciones y adaptación de código a ESP32 |
4 Horas |
12 TS
|
| Lunes 8
|
Descripción
|
Tiempo
|
TS
|
| Alejandro Arévalo |
se comienza con la revisión de la electrónica. |
8 Horas |
24 TS
|
| Carlos Salazar |
Programación de motores |
4 Horas |
12 TS
|
| Jueves 4
|
Descripción
|
Tiempo
|
TS
|
| Alejandro Arévalo |
Impresión de dedos faltantes y corrección de piezas. |
4 Horas |
12 TS
|
| Miércoles 3
|
Descripción
|
Tiempo
|
TS
|
| Alejandro Arévalo |
Se comienza con el ensamblaje. |
8 Horas |
24 TS
|
| Lunes 1
|
Descripción
|
Tiempo
|
TS
|
| Alejandro Arévalo |
Revisión de piezas y ver las que faltan. |
4 Horas |
12 TS
|
Febrero 2021
| Febrero 19 a 5 de Marzo
|
Descripción
|
Tiempo
|
TS
|
| Carlos Salazar |
Investigación PCB |
44 Horas |
132 TS
|
Enero 2021
| Lunes 25
|
Descripción
|
Tiempo
|
TS
|
| Diego Camacho |
Inducción Proyecto |
1 Horas |
3 TS
|
Diciembre 2020
| Lunes 28
|
Descripción
|
Tiempo
|
TS
|
| Fabian Bustos |
Preparación de Escenario de presentación del curso, Primeras Capturas, Edición de Sección de Sensores infrarrojos |
5 Horas |
15 TS
|
TO DO: Utilizar un microfono de solapa para captura de la narración
| Jueves 17
|
Descripción
|
Tiempo
|
TS
|
| Fabian Bustos |
Reunión en M3D para planeación y evaluación de lista de temas a documentar |
5 Horas |
15 TS
|
TO DO: Definir un espacio para adecuarlo como escenario de presentación
Conseguir trípode para ubicar facilmente el celular
Conseguir camara tipo microscopio para grabación de tomas de tamaño reducido (circuitos, componentes electrónicos, pequeños objetos)
| Miercoles 16
|
Descripción
|
Tiempo
|
TS
|
| Fabian Bustos |
Creación de lista de temas a tener en cuenta para el Curso Virtual de Prótesis Mioeléctrica |
5 Horas |
15 TS
|
| Viernes 11
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Diseño palma de la mano prótesis camilo |
5 Horas |
15 TS
|
Septiembre 2020
Semana 31 de agosto 4 de septiembre
| Martes 1
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Trabajo en el diseño de la mano en rhinoceros |
5 Horas |
15 TS
|
| Lunes 31
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Trabajo en el diseño de la mano en tinkercad |
6 Horas |
18 TS
|
Agosto 2020
| Viernes 28
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Diseño palma de la mano prótesis camilo |
5 Horas |
15 TS
|
| Jueves 27
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Ajuste en el diseño de los espacios de los hilos para la mano de la prótesis de Camilo |
5 Horas |
15 TS
|
| Miércoles 26
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Ajuste en el diseño del servo motor en la palma de la mano |
5 Horas |
15 TS
|
| Martes 25
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Diseño del servo motor en la palma de la mano |
4 Horas |
12 TS
|
| lunes 24
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Selección de los diseños para el sistema eléctrico de la prótesis |
5 Horas |
15 TS
|
| Viernes 21
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Investigación sobre el sistema eléctrico que usa el diseño seleccionado |
5 Horas |
15 TS
|
| Jueves 20
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Selección de diseños a presentar para el nuevo prototipo |
4 Horas |
12 TS
|
| Miercoles 19
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Estudio de las prótesis de la fundación, sus necesidades acerca del diseño, investigación de diseños que cumplan estas necesidades |
4 Horas |
12 TS
|
| Martes 18
|
Descripción
|
Tiempo
|
TS
|
| Melissa Villanueva |
Investigación de prótesis de la fundación descarga y revisón de módelos, investigación de prótesis de las que están en el mercado |
5 Horas |
15 TS
|