Difference between revisions of "Prótesis Erick"
(→Analisis Electrónico) |
(→Desarrolladores y Recursos) |
||
| (92 intermediate revisions by 5 users not shown) | |||
| Line 1: | Line 1: | ||
[[Category:Ongoing projects]] | [[Category:Ongoing projects]] | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
== Presentación == | == Presentación == | ||
| − | [[File: | + | [[File:Erick Yate Protesis Entrega 12 12 2020.jpg|300px|thumb|Protesis Erick Yate Diciembre 2020]] |
Erick es un niño de 14 años y habita en la ciudad de Bogotá, en el pasado ha sido beneficiario de la fundación con una protesis mecánica personalizada con motivo del personaje Optimus Prime de la pelicula Transformers. | Erick es un niño de 14 años y habita en la ciudad de Bogotá, en el pasado ha sido beneficiario de la fundación con una protesis mecánica personalizada con motivo del personaje Optimus Prime de la pelicula Transformers. | ||
| Line 21: | Line 9: | ||
=== Objetivo === | === Objetivo === | ||
Este proyecto es un proyecto de vida para Erick. Vamos a documentar aquí todos los modelos de prótesis que va a recibir Erick durante su proceso de crecimiento, tratando de tener para él siempre los mejores avances de la tecnología, para que el uso de la prótesis puede ser cada vez más útil para él. | Este proyecto es un proyecto de vida para Erick. Vamos a documentar aquí todos los modelos de prótesis que va a recibir Erick durante su proceso de crecimiento, tratando de tener para él siempre los mejores avances de la tecnología, para que el uso de la prótesis puede ser cada vez más útil para él. | ||
| + | <br> | ||
| + | <br> | ||
| + | <br> | ||
| + | <br> | ||
| + | <br> | ||
| + | <br> | ||
| + | <br> | ||
| + | <br> | ||
| + | <br> | ||
| + | <br> | ||
| + | <br> | ||
| − | == Recursos == | + | == Desarrolladores y Recursos == |
| − | |||
| − | + | {|class="wikitable" | |
| − | + | |- | |
| − | + | ! Jefes de Proyecto | |
| − | + | ! Desarrolladores | |
| − | + | ! Contabilidad | |
| − | + | |- | |
| − | + | | | |
| − | = | + | {| class="wikitable sortable collapsible" |
| + | ! Profile | ||
| + | ! Photo | ||
| + | |- | ||
| + | | [https://fr.utopiamaker.com/m3duto/user:382172 Johan Garcia]<br> Tutor || [[File:Br_382172_photo.jpg|thumb]] | ||
| + | |- | ||
| + | | [https://fr.utopiamaker.com/m3duto/user:924818 Erick Yate]<br> Jefe de Proyecto|| [[File:Erick Yate Protesis Entrega 12 12 2020.jpg|150px|thumb]] | ||
| + | |} | ||
| + | | | ||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| − | ! | + | ! Profile |
! Photo | ! Photo | ||
| − | ! | + | |
| − | + | |- | |
| + | | [[Fabian Bustos]] <br>(Diseño Electrónico, Mecánico y Programación)|| [[File:Fabian.jpg|Fabian.jpg]] | ||
| + | |- | ||
| + | |- | ||
| + | | [[Miguel Duran]] <br> (Impresión 3D y Ensamble) ||[[File:br_914883_photo.jpg|br_914883_photo.jpg]] | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/uto_tpl_app.htm#!/one?userid=997037 Sebastian Martinez] (Diseño 3D y Documentación ) || [[File:Borra.jpg|125px|]] | ||
| + | |} | ||
| + | | | ||
| + | {| class="wikitable" | ||
| + | |- | ||
| + | ! Componente | ||
| + | ! Valor Unitario | ||
| + | !Cant | ||
| + | ! Valor Total | ||
| + | ! Estado | ||
| + | |- | ||
| + | | Filamento 3D PLA X 500g | ||
| + | | 50.000 COP | ||
| + | |1 | ||
| + | | 50.000 COP | ||
| + | | Disponible en Inventario FM3D | ||
| + | |- | ||
| + | | Procesador Arduino NANO | ||
| + | | 13.000 COP | ||
| + | | 1 | ||
| + | | 13.000 COP | ||
| + | | Disponible en Inventario FM3D | ||
| + | |- | ||
| + | | Servo-motor MG995R | ||
| + | | 25.000 COP | ||
| + | | 1 | ||
| + | | 25.000 COP | ||
| + | | Disponible en Inventario FM3D | ||
| + | |- | ||
| + | | Servo-motor MG92B | ||
| + | | 36.000 COP | ||
| + | | 4 | ||
| + | | 144.000 COP | ||
| + | | Disponible en Inventario FM3D | ||
| + | |- | ||
| + | | Sensor Infrarrojo de Proximidad | ||
| + | | 2.000 COP | ||
| + | |1 | ||
| + | | 2.000 COP | ||
| + | | Disponible en Inventario FM3D | ||
|- | |- | ||
| − | | | + | | Componentes Varios y Cableado |
| − | + | | 12.000 COP | |
| + | |1 | ||
| + | | 12.000 COP | ||
| + | | Switch Pulsador 10mm | ||
|- | |- | ||
| + | | Batería 3.7v 6000mAh | ||
| + | | 14.000 COP | ||
| + | |1 | ||
| + | | 28.000 COP | ||
| + | | Disponible en Inventario FM3D | ||
|- | |- | ||
| − | | | + | | Modulo Cargador HX2SJH20 |
| − | + | | 13.000 COP | |
| + | | 1 | ||
| + | | 13.000 COP | ||
| + | | Disponible en Inventario FM3D | ||
|- | |- | ||
| − | | | + | | Adaptador de pared 9V DC |
| − | + | | 10.000 COP | |
| + | | 1 | ||
| + | | 10.000 COP | ||
| + | | Disponible en Inventario FM3D | ||
| + | |||
|- | |- | ||
| − | | | + | | Total |
| − | + | | | |
| + | | | ||
| + | | 297.000 COP | ||
| + | |} | ||
|} | |} | ||
| Line 60: | Line 129: | ||
=== Evaluación Antropométrica === | === Evaluación Antropométrica === | ||
| − | + | [[File:Medidas protesis 001.jpg|Medidas en modelo final|500px|thumb]] | |
Presenta malformación al nivel de la muñeca. Por petición del beneficiario la prótesis que se va a producir sera corta, empezando en la parte media del antebrazo, y deberá ejecutar al menos 3 posiciones diferentes en la mano. Utilizará un sensor electromiográfico para controlar los movimientos de la mano. | Presenta malformación al nivel de la muñeca. Por petición del beneficiario la prótesis que se va a producir sera corta, empezando en la parte media del antebrazo, y deberá ejecutar al menos 3 posiciones diferentes en la mano. Utilizará un sensor electromiográfico para controlar los movimientos de la mano. | ||
| Line 68: | Line 137: | ||
Escaneo inicial 4.png|Modelo Procesado de Extremidad | Escaneo inicial 4.png|Modelo Procesado de Extremidad | ||
Medidas protesis 001.jpg|Medidas en modelo final | Medidas protesis 001.jpg|Medidas en modelo final | ||
| + | Prueba Antropo 00B.jpg|Verificación de medidas | ||
| + | Prueba Antropo 00A.jpg| | ||
| + | |||
</gallery> | </gallery> | ||
| Line 74: | Line 146: | ||
*Link scan 3D Extremidad: [[https://www.thingiverse.com/thing:3873637]] | *Link scan 3D Extremidad: [[https://www.thingiverse.com/thing:3873637]] | ||
| − | === Diseño de Prótesis === | + | === Diseño de Prótesis e Impresión 3D === |
| + | |||
| + | ====20/11/2019==== | ||
| + | |||
| + | Erick ha elegido el estilo que quiere para su prótesis, se trata de el modelo de brazo biónico futurista presentado por Evan Keuster de [https://3dprint.com/72594/3d-systems-e-nable-k-1-hand/ 3D Systems] en Junio de 2015, en la imagen de la derecha se puede apreciar el modelo de prótesis mecánica diseñada para beneficiarios con extremidad a nivel medio de la mano, se tomarán los datos de la evaluación antropométrica para escalar los modelos de los dedos, palma y brazo a las medidas reales, se modificará el diseño original de la palma para alojar los actuadores y el circuito electrónico, la batería se posicionará a la altura del brazo o se definirá si es más viable dejarla para conectar y cargarla en el bolsillo mientras esta alimenta la prótesis por medio de un cable, esto se hace pensando en la facil utilización e interacción con las vestiduras , se utilizarán materiales rígidos y flexibles en diferentes zonas de la protesis dependiendo del análisis mecánico. | ||
| − | |||
<gallery> | <gallery> | ||
| + | Mano Erick.jpg|Modelo base de la prótesis | ||
| + | E-nable7.jpg| | ||
| + | E-nable8.jpg| | ||
| + | Exploded assembly view.jpg| | ||
Circunferencias socket.jpg|Diseño de Socket | Circunferencias socket.jpg|Diseño de Socket | ||
Vista previa ensamble.jpg|Vista Previa de Ensamble | Vista previa ensamble.jpg|Vista Previa de Ensamble | ||
| Line 84: | Line 163: | ||
</gallery> | </gallery> | ||
| − | |||
| − | + | Se han realizado modificaciones al modelo de mano K1 de Evan Keuster, ([https://3dprint.com/72594/3d-systems-e-nable-k-1-hand/ 3D Systems] y e-Nable) utilizando los software Rhinoceros 6 y ZBrush 4R8 tanto para la modificación como para la generación de complementos, el modelo original presentaba una fusión o unión entre las falanges proximales y mediales de los dedos índice, medio, anular y meñique, esto limitaba la libertad para ejecutar movimientos de modo natural, se modificó el modelo de cada dedo para ajustar los rangos de giro y la tolerancia entre falanges para mejorar la motricidad fina en la ejecución de acciones de agarre. | |
| + | |||
| + | El modelo original está diseñado para funcionar como prótesis mecánica, posee internamente gran espacio, lo que la hace muy util para diferentes casos, pero por tratarse de una prótesis mioeléctrica se ha utilizado el volumen correspondiente a la palma para alojar 4 servo-motores los cuales están a cargo del movimiento de los dedos índice, medio, anular y meñique. | ||
| + | |||
| + | <gallery> | ||
| + | Ensamble muneca 001.jpg|Ensamble Muñeca-Mano | ||
| + | Ensamble muneca 002.jpg| | ||
| + | Modelo dedo proceso.png|Edición de modelo | ||
| + | Impresión 3D menique.png|Preparación para impresión | ||
| + | Tapa poleas Erick Yate 14112020.jpg|Tapa Superior Para Mecanismo | ||
| + | Tapa poleas Erick Yate 14112020 00B.jpg|Tapa Superior Para Mecanismo 2 | ||
| + | Tapa motores Erick Yate 14112020 00B.jpg|Tapa Inferior Para Mecanismo | ||
| + | Tapa motores Erick Yate 14112020.png|Tapa Inferior Para Mecanismo 2 | ||
| + | </gallery> | ||
| + | |||
| + | Teniendo en cuenta la forma y conservando la continuidad del diseño, se diseñó una tapa para proteger el mecanismo de los motores que sobresale en la superficie superior de la palma, tambien se generó un cover para la parte interna de la palma donde se encuentran los servo-motores, en esta tapa hemos realizado un volumen extra que esta pensado para mejorar el agarre de objetos cilíndricos y esféricos. | ||
| + | |||
| + | Desde este modelo exploramos la implementación de un quinto servo-motor para ejecutar la flexión y extensión de la muñeca, por eso desde este punto el modelo original correspondiente se ha reemplazado por un brazo que integra el servo-motor en la zona de la muñeca, avanzando hacia el codo nos deja un espacio para la batería y circuito de control, terminando por el Socket que hace contacto directo con el usuario y sostiene todo el ensamble. | ||
| + | |||
<gallery> | <gallery> | ||
| − | Mano Erick.jpg| | + | Ensamble mano muñeca 002.jpg|Impresión de Palma |
| − | + | Dedo Erick Impresion3D.jpg|Ensamble dedo | |
| − | + | Mano Erick Impresion3D.jpg|Ensamble mano | |
| − | + | Pieza muneca PLA 001.jpg|Pieza Muñeca Impresa | |
| + | Ensamble Protesis Erick.jpg|Ensamble de Prótesis | ||
| + | Ensamble Protesis Erick 002.jpg | ||
| + | Ensamble Protesis Erick 003.jpg | ||
| + | Ensamble Protesis Erick 005.jpg | ||
</gallery> | </gallery> | ||
| Line 108: | Line 208: | ||
</gallery> | </gallery> | ||
| − | Esta prótesis utilizara actuadores tipo servo de los utilizados en modelos de RC, estos motores flexionaran los dedos por medio de hilos que se enrollan sobre poleas cuando los motores se activan, el movimiento de los dedos se reduce a un desplazamiento lineal menor a 4cm de longitud en los hilos, que es el rango entre dedos extendidos y completamente contraidos, al utilizar motores de este tipo se debe diseñar una polea compatible con el mismo teniendo en cuenta que la mitad de la circunferencia sea igual al desplazamiento del dedo, esto se debe a que el servo tiene un giro controlable de 0 a 180 grados como se muestra en la siguiente imagen. | + | === Analisis Electrónico === |
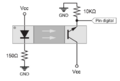
| + | [[File:Arduino-optointerruptor-funcionamiento.png|Arduino-optointerruptor-funcionamiento|500px|thumb]] | ||
| + | Esta prótesis será mioeléctrica, esto significa que utiliza un senso para tomar datos de la actividad muscular de la extremidad, implementa un microcotrolador programable para el proceso de datos y la toma de decisiones, unos actuadores que ejecutan movimiento en el mecanismo de los dedos y muñeca, y un led RGB indicador del estado actual de la prótesis para hacer mas intuitiva la experiencia de usuario. | ||
| + | |||
| + | *Sensores | ||
| + | |||
| + | Para obtener lectura de la actividad muscular utilizamos un sensor infrarrojo de proximidad, el cual se ha fijado a un lugar especifico del socket de la protesis, este sensor toma la distancia resultante de una contracción muscular por medio de una barrera de luz infrarroja, el microcontrolador saca un promedio de 10 muestras para eliminar posibles picos ocasionados por ruido, la señal se escala a un rango de 0 a 180 y se envia directamente a los servos. | ||
| + | |||
| + | |||
| + | <gallery> | ||
| + | Sensor-Infrarrojo-de-Herradura.jpg|Sensor-Infrarrojo-de-Herradura | ||
| + | Arduino-optointerruptor-funcionamiento.png|Arduino-optointerruptor-funcionamiento | ||
| + | </gallery> | ||
| + | |||
| + | |||
| + | *Actuadores | ||
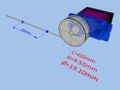
| + | [[File:Desplazamiento servo2.jpg|Diseño de polea|450px|thumb]] | ||
| + | Esta prótesis utilizara actuadores tipo servo-motor, de los mismos utilizados en modelos de RC, estos motores flexionaran los dedos por medio de hilos que se enrollan sobre poleas cuando los motores se activan, el movimiento de los dedos se reduce a un desplazamiento lineal menor a 4cm de longitud en los hilos, que es el rango entre dedos extendidos y completamente contraidos, al utilizar motores de este tipo se debe diseñar una polea compatible con el mismo teniendo en cuenta que la mitad de la circunferencia sea igual al desplazamiento del dedo, esto se debe a que el servo tiene un giro controlable de 0 a 180 grados como se muestra en la siguiente imagen. | ||
| + | |||
| + | Utilizamos servo-motores de engranajes metálicos y alto torque para garantizar el correcto desempeño en diferentes escenarios, para el control de los dedos se han utilizado 4 servo-motores [https://www.towerpro.com.tw/product/mg92b/ TowerPro MG92B] de 3.5kg/cm de torque, con estos se han logrado buenos resultados de agarre en prótesis anteriores producidas por la Fundación M3D. | ||
| + | |||
| + | Esta es la primera prótesis de la Fundación M3D que ejecuta movimiento independiente de flexión y extensión de la muñeca, tarea para la cual hemos instalado un servo-motor tipo [https://www.mactronica.com.co/servomotor-futaba-s3003 TowerPro MG995], de engranajes metálicos y 4.1kg/cm de torque, este servo le dara la facultad a la mano de rotar 180 grados y multiplicar las posibilidades a la hora de tomar objetos que esten en un nivel bajo o alto. | ||
| + | |||
<gallery> | <gallery> | ||
Desplazamiento servo2.jpg|Diseño de polea | Desplazamiento servo2.jpg|Diseño de polea | ||
| + | MG92B-1B.jpg|Servo MG92B (Dedos) | ||
| + | Servo mg995.jpg|Servo MG995 (Muñeca) | ||
| + | |||
</gallery> | </gallery> | ||
| − | + | *Programación | |
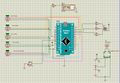
| − | + | [[File:Circuito proteus Karen.jpg|Circuito Electrónico|450px|thumb]] | |
| − | |||
| + | El microcontrolador captura la actividad muscular por medio del sensor conectado al pin análogo A3, posiciona los dedos y la muñeca de acuerdo al estado seleccionado por el botón selector, las posiciones se encuentran en una tabla de valores formada por 5 variables correspondientes a cada servo, de este modo una variable puede guardar varios valores de posición, ser modificada y accesible. | ||
| + | El micro posee un led RGB como indicador visual del estado de la prótesis, a cada pulsación del boton, el led pasará a un color diferente y apuntara a nuevas variables de posición, así el usuario puede tener control total y la posibilidad de añadir multiples posiciones de uso cotidiano. | ||
| + | |||
En la primera imagen se pueden apreciar los componentes necesarios para construir el circuito electrónico, en la segunda imagen se observa las conexiones de los componentes, en la tercera imagen se evidencia a tener en cuenta la posicion del sensor sobre el musculo ya que puede cambiar la señal por lo que se recomienda al beneficiario conservar siempre la misma posición para que la prótesis trabaje de manera normal. | En la primera imagen se pueden apreciar los componentes necesarios para construir el circuito electrónico, en la segunda imagen se observa las conexiones de los componentes, en la tercera imagen se evidencia a tener en cuenta la posicion del sensor sobre el musculo ya que puede cambiar la señal por lo que se recomienda al beneficiario conservar siempre la misma posición para que la prótesis trabaje de manera normal. | ||
| − | En la imagen 4 se muestra el diagrama de flujo del programa utilizado en el Arduino Nano, el programa basicamente toma datos de | + | En la imagen 4 se muestra el diagrama de flujo del programa utilizado en el Arduino Nano, el programa basicamente toma datos del sensor, utiliza una serie de condicionales if para decidir en 4 niveles de señal si se debe mover la muñeca o los dedos, con este metodo el usuario tendrá mas control sobre su prótesis. |
| + | |||
| + | [https://github.com/JasperMachines/Codigo_Protesis_Erick_Stiven_Yate/blob/main/Codigo_Protesis_Erick_Stiven_Yate_V1.ino Codigo Protesis Erick Stiven Yate V1 ] | ||
| − | + | [https://github.com/JasperMachines/Codigo_Protesis_Erick_Stiven_Yate/blob/main/Codigo_Protesis_Erick_Stiven_Yate_V4_Final.ino Codigo Protesis Erick Stiven Yate V4] | |
| − | |||
<gallery> | <gallery> | ||
Componentes.jpg|Imagen 1:Componentes electrónicos | Componentes.jpg|Imagen 1:Componentes electrónicos | ||
| − | + | Circuito proteus Karen.jpg|Circuito Electrónico | |
| − | Myoware position.jpg|Imagen3: | + | Myoware position.jpg|Imagen3: Posición de Sensores (Ejemplo) |
Programacion.jpg|thumb|Imagen 4: Programación | Programacion.jpg|thumb|Imagen 4: Programación | ||
</gallery> | </gallery> | ||
| − | === | + | === Calibración y Entrega === |
| − | 11/12/ | + | |
| + | |||
| + | [[File:Entrega Protesis Erick Yate 12 12 2020.jpg|thumb|Entrega de Protesis Erick Yate Diciembre 2020]] | ||
| + | |||
| + | Es muy gratificante para el equipo de desarrollo de la Fundación hacer entrega de esta prótesis, la cual es el resultado de un extenso proceso de concepción y fabricación por parte de los colaboradores, a quienes agradecemos enormemente por su tiempo y el conocimiento aportado al proyecto, Erick ha recibido esta solución con mucho agrado y muestra curiosidad por su funcionamiento. | ||
| + | |||
| + | Estaremos atentos a los resultados de desempeño de la prótesis, teniendo en cuenta detalles importantes como la duración de la batería, precisión en los movimientos de agarre, la fiabilidad y comportamiento del sensor, la estabilidad del microcontrolador, etc. Con esta información tendremos la oportunidad de analizar, aplicar mejoras a cada etapa del proceso y en consecuecia producir soluciones cada vez más eficaces y completas para futuros beneficiarios de la fundación. | ||
| + | |||
| + | == Actividades == | ||
| + | |||
| + | ===Reportes y TS 2020 === | ||
| + | |||
| + | ==Diciembre== | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 11 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:275045 Karen Pérez] || Se definió la posición del sensor en el socket de la prótesis, se hicieron pruebas de agarre, se hizo trabajo de pintura, se dio la inducción para que el beneficiario la maneje de manera segura || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabian Bustos] || Se definió la posición del sensor en el socket de la prótesis, se hicieron pruebas de agarre, se hizo trabajo de pintura, se dio la inducción para que el beneficiario la maneje de manera segura|| 4 Horas || 12 TS | ||
| + | |} | ||
| − | |||
| − | + | {| class="wikitable sortable collapsible" | |
| − | + | ! Miercoles 9 | |
| − | + | ! Descripción | |
| − | + | ! Tiempo | |
| − | + | ! TS | |
| − | + | |- | |
| − | + | | [https://es.utopiamaker.com/m3duto/user:275045 Karen Perez] || Se genero el circuito final de la protesis en el software Proteus || 5 Horas || 15 TS | |
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabian Bustos] || Se integró el socket a la prótesis dejandolo removible y ajustable, se reemplazo el sensor muscular y el led rgb indicador debido a fallas|| 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | |||
| − | + | {| class="wikitable sortable collapsible" | |
| + | ! Lunes 7 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:275045 Karen Perez] || Se hicieron ajustesen el circuito electrónico y a la programación|| 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabian Bustos] || Se hicieron ajustesen el circuito electrónico y a la programación|| 6 Horas || 18 TS | ||
| + | |} | ||
| − | + | TODO: -Generar el diseño final del circuito para subirlo a la documentación. | |
| − | + | -Integrar el Socket a la prótesis. | |
| − | + | -Reemplazar sensor muscular. | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | + | ==Noviembre== | |
| − | Se | + | {| class="wikitable sortable collapsible" |
| + | ! Sabado 14 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabian Bustos] || Se diseñaron dos tapas para proteger el mecanismo y los motores presentes en la palma|| 6 Horas || 18 TS | ||
| + | |} | ||
| − | + | TODO: -Instalar los sensores de actividad muscular en el socket y realizar la calibración inicial. | |
| − | + | -Realizar limpieza y trabajo de pintura para darle una estética apropiada a la prótesis. | |
| − | + | -Imprimir cover para los motores alojados en la palma (material flexible). | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | + | {| class="wikitable sortable collapsible" | |
| + | ! Viernes 13 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabian Bustos] || Se integró el Socket impreso a la muñeca y mano|| 4 Horas || 12 TS | ||
| + | |} | ||
| − | + | TODO: -Instalar los sensores de actividad muscular en el socket y realizar la calibración inicial. | |
| − | + | -Realizar limpieza y trabajo de pintura para darle una estética apropiada a la prótesis. | |
| − | + | -Imprimir cover para los motores alojados en la palma (material flexible). | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | = | + | {| class="wikitable sortable collapsible" |
| + | ! Jueves 12 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabian Bustos] || Se integró el Socket impreso a la muñeca y mano, se instalaron las baterias de manera definitiva por seguridad dejando un puerto de carga para conexion por cable y su respectivo conector, se modifico la tarjeta controladora para minimizar el espacio que ocupa, se modifico el código recibido (Segunda version en la sección de código) || 8 Horas || 24 TS | ||
| + | |} | ||
| − | + | TODO: -Instalar los sensores de actividad muscular en el socket y realizar la calibración inicial. | |
| − | + | -Realizar limpieza y trabajo de pintura para darle una estética apropiada a la prótesis. | |
| + | -Diseñar e imprimir cover para los motores alojados en la palma (material flexible). | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | + | {| class="wikitable sortable collapsible" | |
| − | + | ! Miercoles 11 | |
| − | + | ! Descripción | |
| − | + | ! Tiempo | |
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabian Bustos] || Se recibio la prótesis en buen estado, la parte mecánica de los dedos se encuentra ensamblada y funcional, de acuerdo a la programación realizada, se recibio un socket impreso en 3D con la superficie de la extremidad y un portabaterias || 7 Horas || 21 TS | ||
| + | |} | ||
| − | + | TODO: -Integrar las partes, modulo portabaterías, socket(brazo) y mano. | |
| − | + | -Definir la distribución del cableado desde los sensores musculares en el socket, | |
| − | + | hasta la muñeca donde llegan los cables de los actuadores. | |
| + | -Complementar el código para que el uso de la protesis sea intuitiva para el usuario. | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | + | {| class="wikitable sortable collapsible" | |
| − | + | ! Jueves 05 | |
| − | + | ! Descripción | |
| − | + | ! Tiempo | |
| − | + | ! TS | |
| − | + | |- | |
| − | + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Teniendo la prótesis se hicieron las pruebas de funcionamiento para realizar la entrega en la fundación con el beneficiario, pero el circuito no estaba soldado de forma correcta por lo que se tuvo que volver a soldar y finalmente no pudo probarse ni realizar la entrega || 10 Horas || 30 TS | |
| − | + | |} | |
| − | |||
| − | |||
| − | |||
| − | + | {| class="wikitable sortable collapsible" | |
| − | + | ! Miércoles 04 | |
| − | + | ! Descripción | |
| − | + | ! Tiempo | |
| − | + | ! TS | |
| − | + | |- | |
| − | + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Se recogió la prótesis en la fundación para realizar las pruebas finales con el circuito soldado || 2 Horas || 6 TS | |
| − | + | |} | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | + | {| class="wikitable sortable collapsible" | |
| − | + | ! Martes 03 | |
| − | + | ! Descripción | |
| − | + | ! Tiempo | |
| − | + | ! TS | |
| − | } | + | |- |
| + | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || Ayuda en la parte de soldar el circuito || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se soldó el circuito y se lijaron las últimas piezas impresas que correspondían a la nueva cavidad del circuito || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Lijado de las ultimas piezas impresas, ayuda en el proceso de soldar el circuito || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:386066 David Vargas]|| Ayuda en la parte de soldar el circuito y lijar las nuevas piezas de la prótesis || 2 Horas || 6 TS | ||
| + | |} | ||
| − | == | + | ==Octubre== |
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 30 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || Entrega de prótesis a Erick y margarita || 9 Horas || 27 TS | ||
| + | |} | ||
| − | = | + | {| class="wikitable sortable collapsible" |
| + | ! Jueves 29 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || Desoldar y soldar el arduino y los cables a este - Probar funcionamiento y ajustar al nuevo diseño || 14 Horas || 42 TS | ||
| + | |} | ||
| − | |||
| − | |||
| − | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| − | ! | + | ! Miercoles 28 |
! Descripción | ! Descripción | ||
! Tiempo | ! Tiempo | ||
! TS | ! TS | ||
|- | |- | ||
| − | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || | + | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || Arreglo de la Wiki en la sección de análisis electrónico - Poner programación, texto, imagenes de los componentes y diseño de la electrónica || 6 Horas || 18 TS |
|} | |} | ||
| Line 269: | Line 441: | ||
! TS | ! TS | ||
|- | |- | ||
| − | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || | + | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || Ir a la fundación para dejar todo soldado, descargar programar del arduino y cambiar el diseño de nuevo || 8 Horas || 24 TS |
|} | |} | ||
| Line 281: | Line 453: | ||
|} | |} | ||
| − | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
! Viernes 23 | ! Viernes 23 | ||
| Line 331: | Line 502: | ||
|} | |} | ||
| − | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
! Viernes 16 | ! Viernes 16 | ||
| Line 351: | Line 521: | ||
| [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || Diseño en hoja del sistema electrónico y programación del switch || 6 Horas || 18 TS | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || Diseño en hoja del sistema electrónico y programación del switch || 6 Horas || 18 TS | ||
|} | |} | ||
| + | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
! Miércoles 14 | ! Miércoles 14 | ||
| Line 359: | Line 530: | ||
| [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || Investigación y propuesta para el cambio de bateria en la prótesis || 7 Horas || 21 TS | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || Investigación y propuesta para el cambio de bateria en la prótesis || 7 Horas || 21 TS | ||
|} | |} | ||
| + | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
! Martes 13 | ! Martes 13 | ||
| Line 368: | Line 540: | ||
|} | |} | ||
| − | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
! Viernes 9 | ! Viernes 9 | ||
| Line 375: | Line 546: | ||
! TS | ! TS | ||
|- | |- | ||
| − | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || | + | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || Diseño en el tornillo || 8 Horas || 24 TS |
| − | |||
| − | |||
|} | |} | ||
| + | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
! Jueves 8 | ! Jueves 8 | ||
| Line 385: | Line 555: | ||
! TS | ! TS | ||
|- | |- | ||
| − | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || | + | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || Propuesta de diseño de la parte electronica|| 7 Horas || 21 TS |
| − | |||
| − | |||
|} | |} | ||
| + | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| − | ! | + | ! Miercoles 7 |
! Descripción | ! Descripción | ||
! Tiempo | ! Tiempo | ||
! TS | ! TS | ||
|- | |- | ||
| − | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || | + | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || Ir a la fundación - recoger materiales y nuevas ideas para la parte electronica|| 7 Horas || 21 TS |
| − | |||
| − | |||
|} | |} | ||
| + | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
! Martes 6 | ! Martes 6 | ||
| Line 405: | Line 573: | ||
! TS | ! TS | ||
|- | |- | ||
| − | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || | + | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || Propuesta para el diseño de la parte electronica || 7 Horas || 21 TS |
|} | |} | ||
| Line 414: | Line 582: | ||
! TS | ! TS | ||
|- | |- | ||
| − | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || | + | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || Reunión con los practicantes - Hacer y enviar lista de materiales || 7 Horas || 21 TS |
|} | |} | ||
| − | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
! Viernes 2 | ! Viernes 2 | ||
| Line 424: | Line 591: | ||
! TS | ! TS | ||
|- | |- | ||
| − | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || | + | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || Prueba de la prótesis y escoger la bateria || 7 Horas || 21 TS |
|} | |} | ||
| Line 433: | Line 600: | ||
! TS | ! TS | ||
|- | |- | ||
| − | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || | + | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || Reunión con Johan y empezar a armar la próetis || 7 Horas || 21 TS |
|} | |} | ||
| + | ==Septiembre== | ||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
! Miércoles 30 | ! Miércoles 30 | ||
| Line 463: | Line 631: | ||
|} | |} | ||
| − | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
! Viernes 25 | ! Viernes 25 | ||
| Line 518: | Line 685: | ||
|} | |} | ||
| − | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
! Viernes 18 | ! Viernes 18 | ||
| Line 560: | Line 726: | ||
| [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] ||Prótesis || 7 Horas || 21 TS | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] ||Prótesis || 7 Horas || 21 TS | ||
|} | |} | ||
| − | |||
| − | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| Line 613: | Line 777: | ||
| [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || Circuito de la prótesis || 3 Horas || 9 TS | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || Circuito de la prótesis || 3 Horas || 9 TS | ||
|} | |} | ||
| − | |||
| − | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| Line 659: | Line 821: | ||
==Agosto== | ==Agosto== | ||
| + | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| − | |||
! Lunes 31 | ! Lunes 31 | ||
! Descripción | ! Descripción | ||
! Tiempo | ! Tiempo | ||
! TS | ! TS | ||
| − | |||
|- | |- | ||
| − | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] || | + | | [https://es.utopiamaker.com/m3duto/user:394704 Nicoll Cáceres] ||Investigación y nuevas ideas para la prótesis de Erik || 3 Horas || 9 TS |
|} | |} | ||
Latest revision as of 13:21, 29 March 2021
Contents
Presentación

Erick es un niño de 14 años y habita en la ciudad de Bogotá, en el pasado ha sido beneficiario de la fundación con una protesis mecánica personalizada con motivo del personaje Optimus Prime de la pelicula Transformers. En este proyecto se desarrollará una prótesis mioeléctrica para su brazo izquierdo, la cual le servirá para mejorar su movilidad y será la plataforma de entrenamiento para futuras prótesis mas avanzadas.
Objetivo
Este proyecto es un proyecto de vida para Erick. Vamos a documentar aquí todos los modelos de prótesis que va a recibir Erick durante su proceso de crecimiento, tratando de tener para él siempre los mejores avances de la tecnología, para que el uso de la prótesis puede ser cada vez más útil para él.
Desarrolladores y Recursos
| Jefes de Proyecto | Desarrolladores | Contabilidad | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
|




Etapas
Evaluación Psicológica
Erick y su madre nos cuentan que la Fundación ya ha construido una prótesis para el muchacho hace algunos años, con motivo del robot Optimus Prime de la serie Transformers, nos han explicado que a causa de un incendio la protesis lamentablemente ya no existe y Erick necesita su protesis para mejorar su desempeño en las tareas diarias.
Evaluación Antropométrica

Presenta malformación al nivel de la muñeca. Por petición del beneficiario la prótesis que se va a producir sera corta, empezando en la parte media del antebrazo, y deberá ejecutar al menos 3 posiciones diferentes en la mano. Utilizará un sensor electromiográfico para controlar los movimientos de la mano.

Medidas Erick Campos

Captura de Scan Original

Modelo Procesado de Extremidad

Medidas en modelo final

Verificación de medidas






Se ha tomado el scan 3D con un sensor tipo Kinect, el modelo resultante presenta imperfecciones en la superficie y se debe recortar para obtener solamente la superficie sobre la que se diseñara la prótesis, se utilizó el software Rhinoceros 6 para limpiar el modelo y se elimino la malla no necesaria.
- Link scan 3D Extremidad: [[1]]
Diseño de Prótesis e Impresión 3D
20/11/2019
Erick ha elegido el estilo que quiere para su prótesis, se trata de el modelo de brazo biónico futurista presentado por Evan Keuster de 3D Systems en Junio de 2015, en la imagen de la derecha se puede apreciar el modelo de prótesis mecánica diseñada para beneficiarios con extremidad a nivel medio de la mano, se tomarán los datos de la evaluación antropométrica para escalar los modelos de los dedos, palma y brazo a las medidas reales, se modificará el diseño original de la palma para alojar los actuadores y el circuito electrónico, la batería se posicionará a la altura del brazo o se definirá si es más viable dejarla para conectar y cargarla en el bolsillo mientras esta alimenta la prótesis por medio de un cable, esto se hace pensando en la facil utilización e interacción con las vestiduras , se utilizarán materiales rígidos y flexibles en diferentes zonas de la protesis dependiendo del análisis mecánico.

Modelo base de la prótesis




Diseño de Socket

Vista Previa de Ensamble







Se han realizado modificaciones al modelo de mano K1 de Evan Keuster, (3D Systems y e-Nable) utilizando los software Rhinoceros 6 y ZBrush 4R8 tanto para la modificación como para la generación de complementos, el modelo original presentaba una fusión o unión entre las falanges proximales y mediales de los dedos índice, medio, anular y meñique, esto limitaba la libertad para ejecutar movimientos de modo natural, se modificó el modelo de cada dedo para ajustar los rangos de giro y la tolerancia entre falanges para mejorar la motricidad fina en la ejecución de acciones de agarre.
El modelo original está diseñado para funcionar como prótesis mecánica, posee internamente gran espacio, lo que la hace muy util para diferentes casos, pero por tratarse de una prótesis mioeléctrica se ha utilizado el volumen correspondiente a la palma para alojar 4 servo-motores los cuales están a cargo del movimiento de los dedos índice, medio, anular y meñique.

Ensamble Muñeca-Mano


Edición de modelo
Preparación para impresión

Tapa Superior Para Mecanismo

Tapa Superior Para Mecanismo 2

Tapa Inferior Para Mecanismo

Tapa Inferior Para Mecanismo 2








Teniendo en cuenta la forma y conservando la continuidad del diseño, se diseñó una tapa para proteger el mecanismo de los motores que sobresale en la superficie superior de la palma, tambien se generó un cover para la parte interna de la palma donde se encuentran los servo-motores, en esta tapa hemos realizado un volumen extra que esta pensado para mejorar el agarre de objetos cilíndricos y esféricos.
Desde este modelo exploramos la implementación de un quinto servo-motor para ejecutar la flexión y extensión de la muñeca, por eso desde este punto el modelo original correspondiente se ha reemplazado por un brazo que integra el servo-motor en la zona de la muñeca, avanzando hacia el codo nos deja un espacio para la batería y circuito de control, terminando por el Socket que hace contacto directo con el usuario y sostiene todo el ensamble.

Impresión de Palma

Ensamble dedo

Ensamble mano

Pieza Muñeca Impresa

Ensamble de Prótesis











Analisis Mecánico
Esta prótesis sera mioelectrica y tendra un movimiento de agarre progresivo, se trata de una estrategia cinemática con la que es posible tener varios niveles de agarre con una sola señal de entrada y un solo actuador mecanico, de este modo la prótesis al recibir un estimulo electromiográfico de nivel bajo, el motor realizaria un agarre tipo pinza tripode (dedos pulgar, indice y medio) y en el momento de recibir una señal de biopotencial mas alto el mecanismo engrana los dedos restantes (dedos anular y meñique), para terminar en una posicion de agarre cilíndrica/esférica, con esto se espera que el beneficiario con un poco de control sobre su actividad muscular en la extremidad, pueda tomar y sostener tanto objetos pequeños utilizando la punta de los tres dedos iniciales o objetos no mayores a la palma de la mano y de un peso no mayor a 150gr. Es posible dejar un grado de libertad de inclinación de 45 grados de extensión en la muñeca, este avance sera opcional dependiendo del espacio que tengamos disponible para un motor adicional.

Agarre Pinza Trípode

Agarre Esférico

Posición de Servos Dactilares

Movimientos de Flexión y Extensión de la Muñeca

Diseño de mecanismo de Flexión y Extensión de la Muñeca






Analisis Electrónico

Esta prótesis será mioeléctrica, esto significa que utiliza un senso para tomar datos de la actividad muscular de la extremidad, implementa un microcotrolador programable para el proceso de datos y la toma de decisiones, unos actuadores que ejecutan movimiento en el mecanismo de los dedos y muñeca, y un led RGB indicador del estado actual de la prótesis para hacer mas intuitiva la experiencia de usuario.
- Sensores
Para obtener lectura de la actividad muscular utilizamos un sensor infrarrojo de proximidad, el cual se ha fijado a un lugar especifico del socket de la protesis, este sensor toma la distancia resultante de una contracción muscular por medio de una barrera de luz infrarroja, el microcontrolador saca un promedio de 10 muestras para eliminar posibles picos ocasionados por ruido, la señal se escala a un rango de 0 a 180 y se envia directamente a los servos.

Sensor-Infrarrojo-de-Herradura
Arduino-optointerruptor-funcionamiento

- Actuadores

Esta prótesis utilizara actuadores tipo servo-motor, de los mismos utilizados en modelos de RC, estos motores flexionaran los dedos por medio de hilos que se enrollan sobre poleas cuando los motores se activan, el movimiento de los dedos se reduce a un desplazamiento lineal menor a 4cm de longitud en los hilos, que es el rango entre dedos extendidos y completamente contraidos, al utilizar motores de este tipo se debe diseñar una polea compatible con el mismo teniendo en cuenta que la mitad de la circunferencia sea igual al desplazamiento del dedo, esto se debe a que el servo tiene un giro controlable de 0 a 180 grados como se muestra en la siguiente imagen.
Utilizamos servo-motores de engranajes metálicos y alto torque para garantizar el correcto desempeño en diferentes escenarios, para el control de los dedos se han utilizado 4 servo-motores TowerPro MG92B de 3.5kg/cm de torque, con estos se han logrado buenos resultados de agarre en prótesis anteriores producidas por la Fundación M3D.
Esta es la primera prótesis de la Fundación M3D que ejecuta movimiento independiente de flexión y extensión de la muñeca, tarea para la cual hemos instalado un servo-motor tipo TowerPro MG995, de engranajes metálicos y 4.1kg/cm de torque, este servo le dara la facultad a la mano de rotar 180 grados y multiplicar las posibilidades a la hora de tomar objetos que esten en un nivel bajo o alto.
Diseño de polea

Servo MG92B (Dedos)

Servo MG995 (Muñeca)


- Programación

El microcontrolador captura la actividad muscular por medio del sensor conectado al pin análogo A3, posiciona los dedos y la muñeca de acuerdo al estado seleccionado por el botón selector, las posiciones se encuentran en una tabla de valores formada por 5 variables correspondientes a cada servo, de este modo una variable puede guardar varios valores de posición, ser modificada y accesible. El micro posee un led RGB como indicador visual del estado de la prótesis, a cada pulsación del boton, el led pasará a un color diferente y apuntara a nuevas variables de posición, así el usuario puede tener control total y la posibilidad de añadir multiples posiciones de uso cotidiano.
En la primera imagen se pueden apreciar los componentes necesarios para construir el circuito electrónico, en la segunda imagen se observa las conexiones de los componentes, en la tercera imagen se evidencia a tener en cuenta la posicion del sensor sobre el musculo ya que puede cambiar la señal por lo que se recomienda al beneficiario conservar siempre la misma posición para que la prótesis trabaje de manera normal.
En la imagen 4 se muestra el diagrama de flujo del programa utilizado en el Arduino Nano, el programa basicamente toma datos del sensor, utiliza una serie de condicionales if para decidir en 4 niveles de señal si se debe mover la muñeca o los dedos, con este metodo el usuario tendrá mas control sobre su prótesis.
Codigo Protesis Erick Stiven Yate V1
Codigo Protesis Erick Stiven Yate V4

Imagen 1:Componentes electrónicos
Circuito Electrónico

Imagen3: Posición de Sensores (Ejemplo)

Imagen 4: Programación



Calibración y Entrega

Es muy gratificante para el equipo de desarrollo de la Fundación hacer entrega de esta prótesis, la cual es el resultado de un extenso proceso de concepción y fabricación por parte de los colaboradores, a quienes agradecemos enormemente por su tiempo y el conocimiento aportado al proyecto, Erick ha recibido esta solución con mucho agrado y muestra curiosidad por su funcionamiento.
Estaremos atentos a los resultados de desempeño de la prótesis, teniendo en cuenta detalles importantes como la duración de la batería, precisión en los movimientos de agarre, la fiabilidad y comportamiento del sensor, la estabilidad del microcontrolador, etc. Con esta información tendremos la oportunidad de analizar, aplicar mejoras a cada etapa del proceso y en consecuecia producir soluciones cada vez más eficaces y completas para futuros beneficiarios de la fundación.
Actividades
Reportes y TS 2020
Diciembre
| Viernes 11 | Descripción | Tiempo | TS |
|---|---|---|---|
| Karen Pérez | Se definió la posición del sensor en el socket de la prótesis, se hicieron pruebas de agarre, se hizo trabajo de pintura, se dio la inducción para que el beneficiario la maneje de manera segura | 4 Horas | 12 TS |
| Fabian Bustos | Se definió la posición del sensor en el socket de la prótesis, se hicieron pruebas de agarre, se hizo trabajo de pintura, se dio la inducción para que el beneficiario la maneje de manera segura | 4 Horas | 12 TS |
| Miercoles 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Karen Perez | Se genero el circuito final de la protesis en el software Proteus | 5 Horas | 15 TS |
| Fabian Bustos | Se integró el socket a la prótesis dejandolo removible y ajustable, se reemplazo el sensor muscular y el led rgb indicador debido a fallas | 5 Horas | 15 TS |
| Lunes 7 | Descripción | Tiempo | TS |
|---|---|---|---|
| Karen Perez | Se hicieron ajustesen el circuito electrónico y a la programación | 5 Horas | 15 TS |
| Fabian Bustos | Se hicieron ajustesen el circuito electrónico y a la programación | 6 Horas | 18 TS |
TODO: -Generar el diseño final del circuito para subirlo a la documentación.
-Integrar el Socket a la prótesis.
-Reemplazar sensor muscular.
Noviembre
| Sabado 14 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Se diseñaron dos tapas para proteger el mecanismo y los motores presentes en la palma | 6 Horas | 18 TS |
TODO: -Instalar los sensores de actividad muscular en el socket y realizar la calibración inicial.
-Realizar limpieza y trabajo de pintura para darle una estética apropiada a la prótesis.
-Imprimir cover para los motores alojados en la palma (material flexible).
| Viernes 13 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Se integró el Socket impreso a la muñeca y mano | 4 Horas | 12 TS |
TODO: -Instalar los sensores de actividad muscular en el socket y realizar la calibración inicial.
-Realizar limpieza y trabajo de pintura para darle una estética apropiada a la prótesis.
-Imprimir cover para los motores alojados en la palma (material flexible).
| Jueves 12 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Se integró el Socket impreso a la muñeca y mano, se instalaron las baterias de manera definitiva por seguridad dejando un puerto de carga para conexion por cable y su respectivo conector, se modifico la tarjeta controladora para minimizar el espacio que ocupa, se modifico el código recibido (Segunda version en la sección de código) | 8 Horas | 24 TS |
TODO: -Instalar los sensores de actividad muscular en el socket y realizar la calibración inicial.
-Realizar limpieza y trabajo de pintura para darle una estética apropiada a la prótesis.
-Diseñar e imprimir cover para los motores alojados en la palma (material flexible).
| Miercoles 11 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Se recibio la prótesis en buen estado, la parte mecánica de los dedos se encuentra ensamblada y funcional, de acuerdo a la programación realizada, se recibio un socket impreso en 3D con la superficie de la extremidad y un portabaterias | 7 Horas | 21 TS |
TODO: -Integrar las partes, modulo portabaterías, socket(brazo) y mano.
-Definir la distribución del cableado desde los sensores musculares en el socket,
hasta la muñeca donde llegan los cables de los actuadores.
-Complementar el código para que el uso de la protesis sea intuitiva para el usuario.
| Jueves 05 | Descripción | Tiempo | TS |
|---|---|---|---|
| Salomé Pérez | Teniendo la prótesis se hicieron las pruebas de funcionamiento para realizar la entrega en la fundación con el beneficiario, pero el circuito no estaba soldado de forma correcta por lo que se tuvo que volver a soldar y finalmente no pudo probarse ni realizar la entrega | 10 Horas | 30 TS |
| Miércoles 04 | Descripción | Tiempo | TS |
|---|---|---|---|
| Salomé Pérez | Se recogió la prótesis en la fundación para realizar las pruebas finales con el circuito soldado | 2 Horas | 6 TS |
| Martes 03 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Ayuda en la parte de soldar el circuito | 4 Horas | 12 TS |
| Sebastian R. | Se soldó el circuito y se lijaron las últimas piezas impresas que correspondían a la nueva cavidad del circuito | 4 Horas | 12 TS |
| Salomé Pérez | Lijado de las ultimas piezas impresas, ayuda en el proceso de soldar el circuito | 4 Horas | 12 TS |
| David Vargas | Ayuda en la parte de soldar el circuito y lijar las nuevas piezas de la prótesis | 2 Horas | 6 TS |
Octubre
| Viernes 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Entrega de prótesis a Erick y margarita | 9 Horas | 27 TS |
| Jueves 29 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Desoldar y soldar el arduino y los cables a este - Probar funcionamiento y ajustar al nuevo diseño | 14 Horas | 42 TS |
| Miercoles 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Arreglo de la Wiki en la sección de análisis electrónico - Poner programación, texto, imagenes de los componentes y diseño de la electrónica | 6 Horas | 18 TS |
| Martes 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Ir a la fundación para dejar todo soldado, descargar programar del arduino y cambiar el diseño de nuevo | 8 Horas | 24 TS |
| Lunes 26 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Soldar arduino | 8 Horas | 24 TS |
| Viernes 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Pasar todo al arduino mega ya que el ardino nano se daño - Visita a la fundación y mostar parte electrónica a Erik y Margarita | 9 Horas | 27 TS |
| Jueves 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Ensamble de Arduino y baterías en la pieza donde va la parte electrónica | 9 Horas | 27 TS |
| David | Ensamble de Arduino y baterías en la pieza donde va la parte electrónica y ajustes de inobedientes para el correcto funcionamiento de la mano | 5 Horas | 15 TS |
| Miércoles 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Visita a la fundación: Entrega de materiales - Entrega de piezas impresas en 3D - Plano electronica en la pagina " Circuit design TINKERCAD" para que david se pueda guiar | 8 Horas | 24 TS |
| David | Recoger piezas en la fundación y trabajar en el ensamble de la parte electrónica con la mano de la prótesis | 2 Horas | 6 TS |
| Martes 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Unión de circuitos | 7 Horas | 21 TS |
| Lunes 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Unión de la parte de programación del switch a la programación de la prótesis | 7 Horas | 21 TS |
| Viernes 16 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Parte electronica del switch y programación | 7 Horas | 21 TS |
| David | Nuevo diseño CAD de la parte electrónica debido al cambio de batería | 2 Horas | 6 TS |
| Jueves 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Diseño en hoja del sistema electrónico y programación del switch | 6 Horas | 18 TS |
| Miércoles 14 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Investigación y propuesta para el cambio de bateria en la prótesis | 7 Horas | 21 TS |
| Martes 13 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Corrección de diseño en el tornillo | 6 Horas | 18 TS |
| Viernes 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Diseño en el tornillo | 8 Horas | 24 TS |
| Jueves 8 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Propuesta de diseño de la parte electronica | 7 Horas | 21 TS |
| Miercoles 7 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Ir a la fundación - recoger materiales y nuevas ideas para la parte electronica | 7 Horas | 21 TS |
| Martes 6 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Propuesta para el diseño de la parte electronica | 7 Horas | 21 TS |
| Lunes 5 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Reunión con los practicantes - Hacer y enviar lista de materiales | 7 Horas | 21 TS |
| Viernes 2 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Prueba de la prótesis y escoger la bateria | 7 Horas | 21 TS |
| Jueves 1 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Reunión con Johan y empezar a armar la próetis | 7 Horas | 21 TS |
Septiembre
| Miércoles 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Ajuste de los dedos y pruebas de estos cogiendo algún objeto | 7 Horas | 21 TS |
| Martes 29 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Investigación de alternativas de baterias para la prótesis | 7 Horas | 21 TS |
| Lunes 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Reunión con David, desarme de prótesis, empezar a armar la prótesis | 7 Horas | 21 TS |
| David | Reunión con David, desarme de prótesis, empezar a armar la prótesis | 1 Horas | 3 TS |
| Viernes 25 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Reunión con Diana, Reunión con David para rediseñar la prótesis | 7 Horas | 21 TS |
| Jueves 24 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Ajustes de prótesis | 7 Horas | 21 TS |
| Miercoles 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Investigación de otras alternativas y diseño | 7 Horas | 21 TS |
| Martes 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Investigación de otras alternativas y diseño | 7 Horas | 21 TS |
| Lunes 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Corrección de errores en la prótesis | 7 Horas | 21 TS |
| Sábado 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Visita a la fundación, ajuste de prótesis con Erik y corrección de errores | 5 Horas | 15 TS |
| Viernes 18 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Ajuste prótesis | 7 Horas | 21TS |
| Jueves 17 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Circuito y funcionamiento | 7 Horas | 21 TS |
| Miércoles 16 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Circuito y soldadura | 7 Horas | 21 TS |
| Martes 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Prótesis | 7 Horas | 21 TS |
| Lunes 14 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Prótesis | 7 Horas | 21 TS |
| Viernes 11 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Programación código | 7 Horas | 21 TS |
| Jueves 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Reunión con Johan García | 1 Horas | 3 TS |
| Nicoll Cáceres | Programación código y parte electrónica de la prótesis | 6 Horas | 18 TS |
| Miercoles 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Programación código y parte electrónica de la prótesis | 7 Horas | 21 TS |
| Martes 8 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Entrega de materiales | 3 Horas | 9 TS |
| Nicoll Cáceres | Programación de la prótesis | 5 Horas | 15 TS |
| Lunes 7 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Programación de la prótesis | 4 Horas | 12 TS |
| Nicoll Cáceres | Circuito de la prótesis | 3 Horas | 9 TS |
| Viernes 4 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Revisión electrónica y de programación, formulación y diseño de nuevas ideas | 7 Horas | 21 TS |
| Jueves 3 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Reunión con Johan García para aprobación de ideas y entrega de la lista de materiales | 2 Horas | 6 TS |
| Nicoll Cáceres | Diseño de idea | 5 Horas | 15 TS |
| Miércoles 2 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Reunción con Johan García y Fabian Bustos para despejar dudas con respecto a la prótesis, funcionamiento y diseño. | 1 Horas | 3 TS |
| Nicoll Cáceres | Investigación y lista de los materiales faltantes, planeación del proyecto. Comprobación del funcionamiento de los servos con su respectivo código. | 6 Horas | 18 TS |
| Martes 1 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Visita a la fundación de materialización 3D con el fin de recoger la prótesis de Erik | 3 Horas | 9 TS |
| Nicoll Cáceres | Observar detalladamente la prótesis de Erik, realizar un informe de dudas y sugerencias con respecto al diseño y la parte electrónica | 5 Hora | 15 TS |
Agosto
| Lunes 31 | Descripción | Tiempo | TS |
|---|---|---|---|
| Nicoll Cáceres | Investigación y nuevas ideas para la prótesis de Erik | 3 Horas | 9 TS |
Marzo
| Sábado 14 | Descripción | Tiempo | TS |
|---|---|---|---|
| David F | Reunión del proyecto | 1 Hora | 3 TS |
| Fabian Bustos | Toma de medidas y ajuste de detalles finales | 6 Horas | 18 TS |
Febrero
| Jueves 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Ensamble de Brazo, Mano y Diseño de Socket | 6 Horas | 18 TS |
| Sebastian Martinez | Medicion y ajuste de los hilos | 3 Horas | 9 TS |
| Lunes 24 | Descripción | Tiempo | TS | |
|---|---|---|---|---|
| Lunes 24/02 | Valentina Osorio | Impresión de tapa superior e inferior del brazo de la prótesis | 2 Horas | 6 TS |
| Lunes 24/02 | María José | Impresión de tapa superior e inferior del brazo de la prótesis | 2 Horas | 6 TS |
| Lunes 24/02 | Fabian Bustos | Diseño de tapa superior e inferior del brazo de la prótesis | 2 Horas | 6 TS |
Enero
| Jueves 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Diseño de brazo, compartimiento para circuitos | 6 Horas | 18 TS |
TODO: Impresión de piezas del brazo.
| Miercoles 29 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Diseño de brazo, compartimiento para circuitos | 6 Horas | 18 TS |
TODO: Continuar el diseño del brazo.
| Martes 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Impresión y ensamble de los dedos en la palma | 6 Horas | 18 TS |
TODO: Continuar el diseño del brazo, acondicionar compartimiento para circuitos.
| Miercoles 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Impresión de dedos medio e indice | 6 Horas | 18 TS |
TODO: Continuar la impresión de los dedos.
| Martes 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Impresión de dedos meñique y anular | 6 Horas | 18 TS |
TODO: Continuar la impresión de los dedos.
| Lunes 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Edición de modelo de dedos para impresión | 6 Horas | 18 TS |
TODO: Continuar la edición de modelos de los dedos para impresión.
Reportes y TS 2019
Diciembre
| Domingo 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Edición de modelo de dedos indice y medio para impresión en material flexible | 8 Horas | 24 TS |
TODO: Continuar la edición de modelos de los dedos para impresión en material flexible.
| Viernes 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Edición de modelo de dedo meñique para impresión en material flexible | 6 Horas | 18 TS |
TODO: Continuar la edición de modelos de los dedos para impresión en material flexible.
| Jueves 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Impresión 3D de pieza para la muñeca | 2 Horas | 6 TS |
TODO: Modificar modelos de los dedos para impresión en material flexible.
| Jueves 12 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Diseño final de la muñeca para impresión 3D | 12 Horas | 36 TS |
| Sebastian Martinez | Impresión 3D de pieza para la muñeca | 1 Hora | 3 TS |
TODO: Repetición de impresión debido a corte de energia en la maquina.
Preparar los modelos finales disponibles para impresión en FabLab M3D Bogota.
Modificar modelos de los dedos para impresión en material flexible.
| Martes 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Impresión y prueba de palma y dedos | 4 Horas | 12 TS |
TODO: Preparar los modelos finales disponibles para impresión en FabLab M3D Bogota.
Modificar modelos de los dedos para impresión en material flexible.
| Lunes 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Diseño final de Socket y mecanismo de inclinación de la muñeca | 4 Horas | 12 TS |
TODO: Finalización de modelos para impresión y diseño de manual de ensamble.
| Domingo 8 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Diseño final de Socket y mecanismo de inclinación de la muñeca | 8 Horas | 24 TS |
TODO: Finalización de modelos para impresión y diseño de manual de ensamble.
Noviembre
| Miercoles 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Escalado de los nuevos dedos para impresión, Simulacion en software para analisis de posición de batería | 3 Horas | 9 TS |
TODO: Diseño del sistema mecánico y adecuación de espacios para circuitos, actuadores, sensor y batería
| Viernes 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Diseño básico de Socket y adaptacion a la mano | 3 Horas | 9 TS |
| Sebastian Martinez | Escalado de palma y dedos a medida de la extremidad derecha | 3 Horas | 9 TS |
TODO: Diseño del sistema mecánico y adecuación de espacios para circuitos, actuadores, sensor y batería
Octubre
| Miercoles 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Edición de Scan 3D en Rhinoceros | 4 Horas | 12 TS |
| Sebastian Martinez | Procesamiento del escaneo y actualizacion de la Wiki | 1 Hora 40 minutos | 5 TS |
TODO: Diseño de socket con el scan 3D disponible
Septiembre
| Sabado 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Scanner 3D y Toma de Medidas | 2 Horas | 6 TS |
Comentarios: Queda pendiente la asignación de colaboradores