Difference between revisions of "Prótesis Andrés Camilo Sánchez"
(→Beneficiario) |
(→Septiembre 2021) |
||
| (316 intermediate revisions by 11 users not shown) | |||
| Line 1: | Line 1: | ||
[[Category:Ongoing projects]] | [[Category:Ongoing projects]] | ||
| − | == | + | == Presentación == |
| + | |||
| + | Los desarrollos en tecnología son cada vez más impresionantes, con posibilidades cada vez más amplias y funcionales en varios escenarios de la industria y las telecomunicaciones, por mencionar algunas. Desde 2012 la [https://materializacion3d.com/ Fundación M3D] ha sido un centro de Investigación en Bioingenieria donde se han logrado avances importantes en el estudio de la Biónica de Brazo, generando a su vez soluciones protésicas de brazo para sus beneficiarios en Colombia. | ||
| + | |||
| + | Después de recopilar y analizar los antecedentes de las tecnologías disponibles, teniendo en cuenta las soluciones entregadas hasta la fecha, sus resultados e interacción con el usuario, hemos optimizado los procesos para la generación de modelos y software para ofrecer a nuestros beneficiarios nuevas soluciones para casos de prótesis transhumeral, hemos decidido generar una ayuda biomecánica para Andrés Camilo que sea de utilidad para sus tareas cotidianas básicas, esta se diseñará y se construira con la posibilidad de generar mecanicamente movimientos y posiciones muy naturales, un set de funciones básicas en su programación, la cual puede ser actualizada posteriormente para llegar a niveles más elevados de dificultad de control y hasta sensación si se desea integrar redes adicionales de sensores en el futuro. La parte estética de la solución será un equilibrio entre la idea de personalización que el usuario desee, la forma de los actuadores y partes estructurales esenciales para el funcionamiento de la prótesis, es importante que aunque la protesis presente una apariencia personalizada, también sea posible mantener una presentación formal básica y funcional, para esto se utilizaran paneles removibles para mantener una forma básica y neutral. | ||
| + | |||
| + | == Desarrolladores y Recursos == | ||
| + | {|class="wikitable" | ||
| + | |- | ||
| + | ! Jefes de Proyecto | ||
| + | ! Desarrolladores | ||
| + | ! Contabilidad | ||
| + | |- | ||
| + | | | ||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
! Profile | ! Profile | ||
| Line 7: | Line 20: | ||
|- | |- | ||
| − | | [https://fr.utopiamaker.com/m3duto/user:382172 Johan Garcia] || [[File:Br_382172_photo.jpg|thumb]] | + | | [https://fr.utopiamaker.com/m3duto/user:382172 Johan Garcia]<br> Tutor || [[File:Br_382172_photo.jpg|thumb]] |
| + | |- | ||
| + | | [https://fr.utopiamaker.com/m3duto/user:924818 Andres Camilo]<br> Jefe de Proyecto|| [[File:Br 924818 photo.jpg|150px|thumb]] | ||
| + | |} | ||
| + | | | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Profile | ||
| + | ! Photo | ||
| + | |||
| + | |- | ||
| + | | [[Fabian Bustos]] <br> Voluntario|| [[File:Fabian.jpg|Fabian.jpg]] | ||
| + | |- | ||
| + | |- | ||
| + | | [https://fr.utopiamaker.com/m3duto/user:830669 Sebastián Ramírez]<br> Practicante || [[File:br_830669_photo.jpg|150px]] | ||
| + | |- | ||
| + | | [https://fr.utopiamaker.com/m3duto/user:268907 Melissa]<br> Practicante || [[File:br_268907_photo.jpg|150px]] | ||
| + | |} | ||
| + | | | ||
| + | {| class="wikitable" | ||
| + | |- | ||
| + | ! Componente | ||
| + | ! Valor Unitario | ||
| + | !Cant | ||
| + | ! Valor Total | ||
| + | ! Estado | ||
| + | |- | ||
| + | | Filamento 3D PLA X 1kg | ||
| + | | 80.000 COP | ||
| + | |1 | ||
| + | | 80.000 COP | ||
| + | | Disponible en Inventario FM3D | ||
| + | |- | ||
| + | | Actuador Lineal Actuonix L16-50-R | ||
| + | | 275.000 COP | ||
| + | | 2 | ||
| + | | 550.000 COP | ||
| + | | Disponible en Inventario FM3D | ||
| + | |- | ||
| + | | Batería Zippy Compact 3000mah 3s1p 20c Lipo | ||
| + | | 260.000 COP | ||
| + | | 2 | ||
| + | | 520.000 COP | ||
| + | | Disponible en Inventario FM3D | ||
| + | |- | ||
| + | | Servo-motor MG995R | ||
| + | | 25.000 COP | ||
| + | | 3 | ||
| + | | 75.000 COP | ||
| + | | Disponible en Inventario FM3D | ||
| + | |- | ||
| + | | Motor DC 5RPM 24v Alto Torque | ||
| + | | 35.000 COP | ||
| + | | 1 | ||
| + | | 35.000 COP | ||
| + | | Disponible en Inventario FM3D | ||
| + | |- | ||
| + | | Puente H Mx1508 L298 Driver Motor Dc | ||
| + | | 5.500 COP | ||
| + | |1 | ||
| + | | 5.500 COP | ||
| + | | Disponible en Inventario FM3D | ||
| + | |- | ||
| + | | Procesador ESP32 | ||
| + | | 34.000 COP | ||
| + | |1 | ||
| + | | 34.000 COP | ||
| + | | Disponible<br>Donado por [[Fabian Bustos]] | ||
| + | |- | ||
| + | | Módulo Aceleròmetro MPU6050 | ||
| + | | 9.000 COP | ||
| + | |1 | ||
| + | | 9.000 COP | ||
| + | | Disponible<br>Donado por [[Fabian Bustos]] | ||
| + | |- | ||
| + | | Metro de Cable Control 6x22 | ||
| + | | 6.000 COP | ||
| + | | 2 | ||
| + | | 12.000 COP | ||
| + | | Disponible<br>Donado por [[Fabian Bustos]] | ||
| + | |||
| + | |- | ||
| + | | Total | ||
| + | | | ||
| + | | | ||
| + | | 1.320.500 COP | ||
| + | |} | ||
| + | |} | ||
| + | |||
| + | == Etapas de Desarrollo== | ||
| + | <br> | ||
| + | === Evaluación Antropométrica === | ||
| + | |||
| + | En esta sección se recopila toda la información dimensional del caso para analizar la construcción a escala real un ensamble detallado de la pròtesis en software 3D, contiene los datos de las sesiones de toma de medidas junto con el scan 3D o modelado por fotogrametría de la extremidad, datos necesarios para realizar una correcta distribución antropométrica, lo que nos dara las posiciones apropiadas para los actuadores electro-mecánicos, sensores, tarjetas de control y demás componentes funcionales de la solución. | ||
| + | |||
| + | ==== Diseño Socket ==== | ||
| + | [[File:WhatsApp Image 2020-08-23 at 11.03.43.jpg|200px|thumb|Andrés Camilo Sanchez]] | ||
| + | El socket es la porción de la prótesis que se acomoda alrededor del muñón a la cual se conectan los demás componentes, es una parte importante de la prótesis pues tiene la función de alojar el muñón, desempeñando funciones de apoyo, control e interacción entre el beneficiario y el miembro artificial. | ||
| + | Este elemento permite el contacto total entre el socket y el miembro residual, evitando movimientos inadvertidos y posibles lesiones causadas por concentraciones incómodas de presión. | ||
| + | El proceso de construcción del socket tuvo varias etapas, desde la toma inicial del molde en yeso del muñón, hasta la construcción del socket definitivo. | ||
| + | Para la primera etapa se tomó el molde en yeso, se hizo la toma de medidas y el escáner del mismo; para el escáner del muñón se utilizó el programa skanect, el cual consta de un dispositivo que escanea el miembro con un Kinect y la imagen captada es digitalizada para guardar la forma y luego trabajar sobre esta en un programa de diseño. | ||
| + | |||
| + | Para la segunda etapa, el diseño, se realizó un estudio de los tipos de socket que son usados en la actualidad y las ventajas que ofrece cada uno hasta llegar a un modelo que se acopla correctamente a la anatomía del beneficiario, se usó el programa Rhinoceros 3d, este programa nos permitió diseñar cada capa del socket y suavizar los acabados del mismo, la forma fue captada desde el escáner captado en la etapa de toma de medidas. | ||
| + | Para este diseño se tuvo en cuenta el encaje que tendría a la parte del antebrazo, se tuvo en cuenta el anclaje de un motor dc a la parte inferior del socket, el cual también encaja desde su eje al antebrazo para permitirle la movilidad al resto del brazo, además de una pieza que le da más resistencia ante los movimientos propios de la prótesis. | ||
| + | |||
| + | Se tuvo en cuenta que para hacer uso de una prótesis debe haber algún material que proteja el muñón de posibles lesiones que puede causar el uso de la prótesis, pues al estar en contacto directo con la piel se pueden generar daños o irritación en la piel, para esto se diseñó un liner, se trata de una cubierta protectora hecha de un material flexible, acolchado, que permite la transpiración de la piel y tiene secado rápido. Se coloca sobre el muñón de forma que lo cubra para reducir el roce entre la piel y el encaje protésico (socket). | ||
| + | Para el liner se realizó un estudio de los materiales que tienen las propiedades previamente mencionadas, por lo que finalmente se diseñó con un material llamado elastano, siguiendo las medidas del muñón y añadiendo pequeños puntos de látex líquido en el exterior del liner con el fin de que evitara el movimiento en el socket. | ||
| + | |||
| + | |||
| + | Posterior al diseño e impresión del socket se pulieron las piezas en la máquina de acabados para retirar algunas partes sobrantes que fueron impresas, para luego ensamblar todas las piezas del socket y hacer la unión con el motor dc y el antebrazo. | ||
| + | |||
| + | |||
| + | <gallery> | ||
| + | WhatsApp Image 2020-08-23 at 11.03.43.jpg | Vista Frontal | ||
| + | ANTROPO 00B2.png|Calculo de Proporciones | ||
| + | Molde en yeso.jpg|Imagen 1: Molde en yeso del brazo derecho | ||
| + | SOCKET.png|Imagen 3: Diseño de socket | ||
| + | Harness front.jpg|thumb|Arnés Vista Frontal | ||
| + | Harness back.jpg|thumb|Arnés Poterior | ||
| + | Harness shoulder detail.jpg|thumb|Arnés Detalle Hombro | ||
| + | Harness detail back.jpg|thumb|Arnés Detalle Espalda | ||
| + | </gallery> | ||
| + | |||
| + | === Diseño de Prótesis === | ||
| + | |||
| + | *Personalización | ||
| + | Andrés ha elegido el estilo que quiere para su prótesis, se trata de el videojuego CREED, el personaje utiliza vestiduras de tela y una armadura de brazo, tipo guerrero medieval, utiliza algunas armas que tienen detalles y grabados de los la que también se pueden sacar superficies y formas relacionadas al juego, en las superficies mas visibles de la mano incluirá algunos logos del juego, es importante tener en cuenta que el usuario puede no querer tener siempre la misma apariencia, por lo que el diseño de la parte gráfica debe ser hecho sobre páneles o covers removibles e independientes del sistema mecánico/electrónico y sin afectar su apariencia basica estética de mano biónica, asi serán facilmente retirados o reemplazados por otros nuevos. La parte del codo bajo el socket se construirá como un brazo robótico con apariencia un poco plana, sin muchas curvas, debido a que el espacio es mayormente ocupado por los motores y las estructuras de soporte, la mano es un modelo ya utilizado para la [https://wiki.utopiamaker.com/index.php/Pr%C3%B3tesis_Erick Prótesis de Erick Yate], este se modificará por segunda vez para mejorar algunos detalles en las falanges de los dedos y para integrar los actuadores que les darán movilidad. En las dos primeras imagenes de la izquierda se puede apreciar el modelo inicial de la mano, se tomarán los datos de la evaluación antropométrica para escalar los modelos de los dedos, palma y brazo a las medidas reales. | ||
| + | |||
| + | <gallery> | ||
| + | Distribucion de Actuadores.jpg|Plano Inicial | ||
| + | Estructuras_Basicas_de_Ensamble.jpg|Ensamble de Actuadores y Modelos Iniciales | ||
| + | Estructuras_Basicas_de_Ensamble_00B.jpg| | ||
| + | Mano top.jpg|Nuevo Modelo de Mano | ||
| + | Mano bottom.jpg| | ||
| + | Comparacion palmas.jpg|Palma Original(Izquierda) y Palma Modificada(Derecha) | ||
| + | Inserto Soporte Dedos.jpg|Pieza de Soporte de los Dedos | ||
| + | Soporte Servo Pulgar.jpg|Soporte Servo Dedo Pulgar | ||
| + | |||
| + | </gallery> | ||
| + | 12_03_2021 | ||
| + | |||
| + | Una vez realizado el diseño de la mano con sus accesorios, se realiza el diseño de una pieza/actuador de interconexion entre el brazo y el codo que le permitira ejecutar rotaciones de supinación a pronación, se trata de un servo-motor MG996R que se sitúa dentro de dos modelos cilindricos, transmitiendo un efecto de rotación sobre uno de ellos por medio de un mecanismo de piñon interno similar al planetario, el servomotor transmite movimiento al cilindro exterior, que va unido directamente al resto de la extremidad, la parte cilindrica interna contiene el servomotor y se ha integrado directamente al soporte que conecta con el eje de rotación del codo. | ||
| + | |||
| + | <gallery> | ||
| + | ENSAMBLE ROTOR BRAZO.jpg|thumb|Ensamble de Actuador Rotor de Brazo | ||
| + | Motor giro brazo 00A.jpg|Motor de Giro del Brazo | ||
| + | Motor giro brazo 00B.jpg | ||
| + | Motor giro brazo 00C.jpg|Motor de Giro de Brazo y Codo Integrados | ||
| + | Pieza Estructural del Brazo.png|Pieza Estructural del Brazo | ||
| + | </gallery> | ||
| + | |||
| + | 9_03_2021 | ||
| + | <gallery> | ||
| + | Brazo Andres Camilo Sanchez 9032021 00A.png|Brazo Andres Sanchez 09_03_2021 | ||
| + | Brazo Andres Camilo Sanchez 9032021 00B.png| | ||
| + | Brazo Andres Camilo Sanchez 9032021 00C.png| | ||
| + | Brazo Andres Camilo Sanchez 9032021 00D.png| | ||
| + | Brazo Andres Camilo Sanchez 9032021 00E.png| | ||
| + | Brazo Andres Camilo Sanchez 9032021 00F.png| | ||
| + | </gallery> | ||
| + | |||
| + | === Diseño Electromecánico === | ||
| + | [[File:Desplazamiento servo2.jpg|300px|thumb|Diseño de polea]] | ||
| + | *Requerimientos del Sistema | ||
| + | |||
| + | Esta prótesis será mioeléctrica, esto significa que utilizara una red de actuadores mecànicos (servo-motores), unos dispositivos de captura de señal (sensores), para tomar datos de la actividad muscular del usuario, y una etapa de proceso y toma de decisiones que sera el cerebro operacional de la pròtesis, gobernará sobre su comportamiento y su interacción con el usuario. | ||
| + | |||
| + | *Actuadores Electro-Mecánicos | ||
| + | |||
| + | Esta prótesis utilizara actuadores tipo servo-motor, de los mismos utilizados en modelos de RC, estos motores flexionaran los dedos por medio de hilos que se accionan desde las poleas de los motores, el movimiento de los dedos se reduce a un desplazamiento lineal menor a 4cm de longitud en los hilos, que es el rango entre dedos extendidos y completamente contraidos, al utilizar motores de este tipo se debe diseñar una polea compatible con el mismo teniendo en cuenta que la mitad de la circunferencia sea igual al desplazamiento del dedo, esto se debe a que el servo tiene un giro controlable de 0 a 180 grados como se muestra en la siguiente imagen. | ||
| + | |||
| + | |||
| + | Actuador Rotor de Brazo | ||
| + | [[File:SIstema_Piñon_Interno.jpg|Mecanismo Tipo Piñón Interno|300px|thumb]] | ||
| + | Esta solución protésica tiene como propósito asemejar lo mas posible los movimientos naturales de un brazo orgánico, por esto se ha integrado un actuador posicionado entre el brazo y el codo, que le dará la posibilidad de rotar el brazo sostenido desde el codo en un rango de 180 grados, este actuador le dará a la prótesis la capacidad de efectuar posiciones de supinación y pronación del brazo, este mecanismo se impulsa por medio de un servo-motor MG995R de 9.4kg/cm de torque, su piñonería metálica estará unida a un mecanismo tipo piñón interno que será también un multiplicador de torque por un factor de 2 y que gracias a su forma presenta una ubicación perfecta del actuador y el punto de unión con la pieza estructural del brazo. | ||
| + | |||
| + | <gallery> | ||
| + | SIstema_Piñon_Interno.jpg|Mecanismo Tipo Piñón Interno | ||
| + | Sistema_de_Piñon_Interno_00B.jpg|Diseño de Rotor de Brazo con Mecanismo Tipo Piñón Interno | ||
| + | ENSAMBLE_ROTOR_BRAZO.jpg|Ensamble Rotor de Brazo | ||
| + | ENSAMBLE ROTOR BRAZO 00C.jpg| | ||
| + | </gallery> | ||
| + | |||
| + | |||
| + | Los actuadores electro-mecánicos son en su mayoría servo-motores de rotación angular máxima de 180 Grados, de estos contamos dos unidades MG996R de 11Kg de torque, cada uno controlando dos dedos, en la configuración (indice, medio - anular, menique). Para el dedo pulgar utilizaremos temporalmente un MG90S de 2.2Kg, el cual puede mejorar para tener un agarre mas efectivo. Para las funciones de extensión, flexión, aducción, abducción, más la libre circunducción de la muñeca usaremos la combinación de dos actuadores lineales [https://www.actuonix.com/category-s/1823.htm Actuonix L-16-50-R] con 50mm de desplazamiento cada uno. | ||
| + | [https://www.youtube.com/watch?v=uR2cG-MCWK4 Actuadores Lineales Actuonix de 50mm Test] | ||
| + | |||
| + | Continuando hacia el codo encontramos un servo-motor MG996R de 11Kg de torque, el cual ha sido ensamblado en un mecanismo que rota el ensamble del brazo y convierte ese punto en un grado adicional de libertad, finalmente encontramos en el codo un motor-reductor de 10rpm de alto torque, a este se debe instalarse un sensor de posición y una tarjeta controladora para controlarlo en modo lazo cerrado. | ||
| + | |||
| + | <gallery> | ||
| + | |||
| + | MG92B-1B.jpg|Servo MG92B (Pulgar) | ||
| + | Servo pulgar soporte.png|Ubicación Servo Pulgar | ||
| + | Servo mg995.jpg|Servo MG995 (Indice-Medio, Anular-Meñique) | ||
| + | Servos dedos protesis Andres Camilo Garcia.png|thumb|Ubicación de Servos Modificados | ||
| + | Servos Integrados en Modulo.jpg|Servos Modificados Integrados en Modulo | ||
| + | Firgelli l16.png|Actuador Lineal L16 (Rotación de Muñeca) | ||
| + | </gallery> | ||
| + | |||
| + | Fuentes de Datos: | ||
| + | |||
| + | [https://www.researchgate.net/figure/Hand-grip-strength-according-to-age-in-males_tbl1_324269430 Tabla de edad vs fuerza de agarre en mano (humano masculino)] | ||
| + | |||
| + | |||
| + | *Sensores | ||
| + | [[File:Posiciones_Normales_de_Trabajo_de_la_Protesis.jpg|Límites de Acción de la Prótesiso|thumb|300px]] | ||
| + | Para obtener lectura de la actividad muscular utilizamos un sensor infrarrojo de proximidad, el cual se ha fijado a un lugar especifico del socket de la protesis, este sensor toma la distancia resultante de una contracción muscular por medio de una barrera de luz infrarroja, el microcontrolador saca un promedio de 10 muestras para eliminar posibles picos ocasionados por ruido, la señal se escala a los rangos definidos por el boton selector de actuadores. | ||
| + | |||
| + | 28/03/2021 | ||
| + | Con el objetivo de implementar un control inteligente de las rotaciones de los actuadores Rotor de Codo y Rotor de Brazo, se han instalado dos modulos tipo Giroscopo/Acelerómetro, con los cuales el procesador puede tener una referencia de posición con respecto a la gravedad y el espacio, con esto podemos definir limites de activación de movimientos, para evitar que la prótesis ejecute movimientos anormales o que no son de utilidad para el usuario. | ||
| + | |||
| + | <gallery> | ||
| + | Módulo Giróscopo Acelerómetro MPU6050.jpg|Módulo Giróscopo Acelerómetro MPU6050 | ||
| + | MPU6050 ESP32 Wiring-Schematic-Diagram.png|Esquematico de Conexión entre MPU6050 y Procesador ESP32 | ||
| + | Posiciones_Normales_de_Trabajo_de_la_Protesis.jpg|Límites de Acción de la Prótesis | ||
| + | Sensor-Infrarrojo-de-Herradura.jpg|SensorInfrarrojo Tipo Herradura (Sensor Muscular) | ||
| + | Arduino-optointerruptor-funcionamiento.png|Esquematico de Conexión de Sensor Muscular | ||
| + | Arduino-serial-plotter.gif|thumb|Señal de Sensor en Arduino Plotter | ||
| + | </gallery> | ||
| + | |||
| + | *Procesador Principal | ||
| + | [[File:ESP32-Pinout.jpg|thumb|400px|ESP32 Tarjeta Pinout]] | ||
| + | Debibo a la dificultad de este proyecto se utilizara como procesador principal un microcotrolador programable ESP32 para el proceso de datos y el control directo de los actuadores, este procesador cuenta con conversor ADC de 12 bits lo que proporciona un rango de 4096 niveles por un nivel maximo de voltaje de 3.3V, lo que representa una mejora en la sensibilidad de captura de datos de entrada desde el usuario, el procesador posee tecnología de doble nucleo para el manejo simultaneo de aplicativos, tareas de control de hardware y de los modulos bluetooth y wi-fi. La capacidad de memoria, la velocidad y la arquitectura de este procesador le da a las prótesis mioeléctricas un potencial enorme, es una oportunidad para generar soluciones protésicas mas inteligentes, de alto desempeño e intuitivas para los usuarios. | ||
| + | |||
| + | |||
| + | *Programación | ||
| + | [[File:Programacion.jpg|thumb|400px|Imagen 4: Programación]] | ||
| + | El microcontrolador captura la actividad muscular por medio del sensor conectado al pin análogo A3, posiciona los dedos y la muñeca de acuerdo al estado seleccionado por el botón selector, las posiciones se encuentran en una tabla de valores formada por 5 variables correspondientes a cada servo, de este modo una variable puede guardar varios valores de posición, ser modificada y accesible. | ||
| + | El micro posee un led RGB como indicador visual del estado de la prótesis, a cada pulsación del boton, el led pasará a un color diferente y apuntara a nuevas variables de posición, así el usuario puede tener control total y la posibilidad de añadir multiples posiciones de uso cotidiano. | ||
| + | |||
| + | En la primera imagen se pueden apreciar los componentes necesarios para construir el circuito electrónico, en la segunda imagen se observa las conexiones de los componentes, en la tercera imagen se evidencia a tener en cuenta la posicion del sensor sobre el musculo ya que puede cambiar la señal por lo que se recomienda al beneficiario conservar siempre la misma posición para que la prótesis trabaje de manera normal. | ||
| + | |||
| + | En la imagen 4 se muestra el diagrama de flujo del programa utilizado en el ESP32, el programa basicamente toma datos del sensor, utiliza una serie de condicionales if para decidir en 4 niveles de señal si se debe mover la muñeca o los dedos, con este metodo el usuario tendrá mas control sobre su prótesis. | ||
| + | |||
| + | [https://github.com/JasperMachines/Codigo_Protesis_Andres_Camilo_Sanchez/blob/main/Codigo_Protesis_Andres_Camilo_Sanchez.ino Codigo Protesis Andres Sanchez V1 ] | ||
| + | |||
| + | |||
| + | <gallery> | ||
| + | Componentes.jpg|Imagen 1:Componentes electrónicos | ||
| + | CIRCUITO ANDRES CAMILO SANCHEZ 24 03 2021.png|Circuito Electrónico de Prótesis | ||
| + | Myoware position.jpg|Imagen3: Posición de Sensores (Ejemplo) | ||
| + | Programacion.jpg|thumb|Imagen 4: Programación | ||
| + | </gallery> | ||
| + | |||
| + | |||
| + | *Interfaz de Usuario | ||
| + | [[File:Aplicativo_Control_de_Protesis_en_Telefono.png|thumb|200px|Aplicativo de Prótesis en Telefono Móvil]] | ||
| + | |||
| + | Debido a la cantidad de actuadores y los grados de libertad que posee la prótesis, se hace complicado obtener multiples señales del beneficiario para generar movimientos de accion simultánea y natural, razon por la cual hemos optado inicialmente por implementar un control secuencial de los movimientos con dos elementos de captura de señal, | ||
| + | |||
| + | El avance más importante de esta prótesis es la implementación de una interfaz gráfica siempre accesible via wi-fi desde un ordenador o telefono conectado a la red, util para mover los actuadores y obtener lectura de los sensores en tiempo real, esto actúa de este modo para detectar fallas o errores en los motores, los mecanismos y a veces los programas del chip. En segundo plano a este aplicativo sirve para acceder a las posiciones guardados en la memoria, que son elegidos por el usuario con un boton selector y ejecutados proporcionalmente por el sensor de actividad muscular, la interfaz web tiene acceso directo a la memoria de posiciones del programa, asi podemos programar movimientos y ejecutarlos de manera agil y personalizada. | ||
| + | |||
| + | Adicional a esto se instalará también una interfaz visual por medio de un led RGB indicador, que informará representará en varios colores el estado actual de la prótesis, asi el usuario cual es la acción a seguir para seguir utilizandola de manera natural, de este modo hace mas intuitiva la experiencia de usuario. | ||
| + | |||
| + | el primero es un botón ubicado en la parte interior del socket, en la parte baja del biceps, para que el usuario cambie entre los diferentes actuadores con tan solo presionar el boton, el segundo incluye un sensor de actividad muscular tipo infrarrojo, la salida de señal activa proporcionalmente los actuadores previamente activos con el boton selector | ||
| + | |||
| + | [https://github.com/JasperMachines/UI_UX_M3D Codigo ESP32 Hand Server v1.0] | ||
| + | |||
| + | <gallery> | ||
| + | Aplicativo_Control_de_Protesis_en_PC.png|Aplicativo de Prótesis en PC | ||
| + | </gallery> | ||
| + | |||
| + | === Impresión 3D y Ensamble === | ||
| + | [[File:Test de Rotación de Muñeca.jpg|Test de Rotación de Muñeca|300px|thumb]] | ||
| + | [[File:Mano Andres Garcia.jpg|Palma y Dedos|300px|thumb ]] | ||
| + | Se imprimen las partes de la mano en plástico PLA, es un polímero biodegradable y aprobado por la FDA para contacto seguro con humanos, aunque para evitar riesgos como alergias al material, se dispone un panel de material suave e aislante entre la piel y la superficie de contacto directo con la prótesis. las articulaciones de la mano se imprimieron con un relleno sólido para garantizar la máxima resistencia mecánica en su desempeño, la capacidad de agarre de la mano va limitada por los puntos de fricción que deben adicionarse a las falanges distales y mediales, estos pads deben imprimirse o fabricarse de material flexible y compatible con los adhesivos disponibles. | ||
| + | |||
| + | Las falanges deben hacerse deslizar una dentro de otra de manera firme y sin juego, para ensamblar con tornillos tipo M2.5 de variables longitudes, se recomienda verificar una rotación suave, alineada, repetible y sin desviaciones para garantizar un control más fino de los movimientos. Es importante tener en cuenta que la suma de la fricción que los puntos de giro del dedo generan, reducen igualmente el torque útil del motor, es entonces más conveniente una acción limpia de flexión y extensión donde son el resorte y el motor los que dominen el movimiento del dedo. | ||
| + | |||
| + | Los dedos son naturalmente extendidos por un trozo de filamento flexible de menos de 1.5mm de diámetro, el cual se instala antes que los hilos de tracción desde los motores, el hilo se pasa por los conductos de la palma superior de la mano, se dirigen por la palma y de nuevo a un segundo dedo adyacente, es decir que con un segmento de hilo flexible se genera la tensión que estira dos dedos a la vez, a una posición de mano abierta. | ||
| + | |||
| + | |||
| + | <gallery> | ||
| + | Impresión Dedos Andrés García.jpg|Impresión Dedos Andrés García | ||
| + | Dedo impreso 00A.jpg|dedo Impreso | ||
| + | Palma RotBrazo Dedos.jpg|Piezas de Mano y Codo Para Ensamble | ||
| + | Estructural Brazo Back.jpg|Pieza Estructural del Brazo | ||
| + | Conector Codo Rotor.jpg|Conector Codo Rotor | ||
| + | Retenedor Servo Rotor Brazo.jpg|Retenedor Servo Rotor Brazo | ||
| + | </gallery> | ||
| + | |||
| + | <gallery> | ||
| + | Tapas de Rotor de Brazo.jpg|Tapas de Rotor de Brazo | ||
| + | Partes Rotor de Brazo.jpg|Partes Rotor de Brazo | ||
| + | Ensamble Rotor de Brazo.jpg|Ensamble Rotor de Brazo | ||
| + | Rotor+Brazo+Palma2.jpg|Rotor+Brazo+Palma(sup) | ||
| + | Rotor+Brazo+Palma.jpg|Rotor+Brazo+Palma+(inf) | ||
| + | |||
| + | </gallery> | ||
| + | |||
| + | == Registro de TS == | ||
| + | |||
| + | === Septiembre 2021 === | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 29 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Seguir con el diseño y agregar movimiento parcial a las piezas || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | [[File:2f.jpg|thumb]] | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 28 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Seguir con el diseño || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 27 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Empezar el rediseño del antebrazo ya que no tiene espacio para los cables. Se empieza el diseño de toda la pieza || 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | [[File:1f.jpg|thumb]] | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Sábado 25 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Implemetación de rotor en el motor. El motor presenta fallas al momento del devolver la posición, por lo tanto se cambia el potenciometro interno del motor para que devuelva correctamente la posición || 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 21 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Simulación de la rotación de antebrazo || 3 Horas || 9 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 20 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Análisis de pieza de antebrazo y rediseño del engranaje del motor || 3 Horas || 9 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Sábado 18 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Implementación del motor del codo al código y probar su funcionamiento con tarjeta ESP32 || 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 14 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Finalización del rediseño de la pieza y prueba del control del codo con el potenciometro || 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 13 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Rediseño de la pieza de anclaje del potenciometro por mal funcionamient y finalización de la electronica para esta pieza|| 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 10 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Modificación del motor y diseño de pieza para anclaje del potenciometro al motor || 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | [[File:Codo pot.jpg|thumb]] | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 9 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Rediseño de la pieza del codo para montar sensor de posición (potenciometro) y hacer el correcto control de la prótesis || 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 8 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Creación del código final para el manejo de la prótesis, se validó el funcionamiento en simulación. Empezar investigación de la entrada del sensor y unión con la programación y adaptar código para el micro-procesador ESP32 || 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 7 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Fijar limites en la programación para movimiento de los motores. Arreglar nuevamente la mano || 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 6 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Documentación de la programación para futuros usos|| 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 1 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Arreglar motores de la mano e implementación de motores|| 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | === Agosto 2021 === | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 31 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Implementación de algoritmos de control en motores de la mano || 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 30 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Implementación de control en motores con sistema de lazo abierto || 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 25 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Implementación de contrlador PID en simulación con múltiples motores || 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | [[File:Simulacion miltimotor.jpg|thumb]] | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 24 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Mejoramiento de controlador a tipo PID, finalización de programación de controlador de lazo cerrado, implementación en la prótesis || 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 23 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Finalización de la simulación y programación para los actuadores lineales con controlador tipo PI. Se logró manejar simulteanamente ambos motores|| 7 Horas || 21 TS | ||
| + | |||
| + | |} | ||
| + | |||
| + | [[File:Simulacion.jpg|thumb|Simulación Proteus]] | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 19 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Implementación de controlador P y PI en Proteus para la simulación del sistema|| 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 18 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Finalizaciónd de controlador PI. Se redujo el rizado y se siguió adelantando la documentación || 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 17 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Adelanto en pieza 3d para la impresora, adelantar documentación de las librerías de arduino || 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miércoles 11 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Se hizo el diseño de una pieza para un soporte de la impresora. Se conectó un potenciómetro al sistema para simular la entrada de una señal y la respuesta del controlador. Ya que la respuesta tiene rizado, se empezó a programar un controlador tipo PI para manejar mejor el motor|| 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | [[File:Control.png|thumb|Control P ]] | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 10 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Se empezó la creación y documentación de las librerias para manejar el motor. Se termino el controlador tipo P, ya funciona correctamente || 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 9 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] ||Se empezó la programación de funciones para controlar los motores para seguir una ubicación a través de un controlador tipo P|| 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 4 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Se continuó con la simulación del sistema en proteus, avanzado en la programación para controlar los motores simultaneamente. || 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 2 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Se creo una simulación de todo el montaje físico en proteus, teniendo en cuenta los drivers, los motores y el Arduino. Se programó internamente el arduino de proteus para poder hacer programación y simulaciones sin necesidad de tener que tener todo el montaje real || 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | === Julio 2021 === | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miércoles 28 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Se implementó el uso de un convertidor DC-DC para manejar dos voltajes diferentes, dependiendo el moto que se vaya a usar. Se adelantó el código en Arduino para manejar múltiples motores. || 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 27 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Avances en el montaje de protoboard de la electrónica || 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 26 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:514235 Juan González] || Arreglar conexiones de la prótesis e iniciar el montaje en protoboard con los controladors || 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | === Abril 2021 === | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 9 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Reconstrucción de circuito y Adaptación de Firmware, || 12 Horas || 36 TS | ||
| + | |} | ||
| + | TODO:Diseñar las tapas para el área de los actuadores lineales y muñeca . | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 8 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Reconstrucción de circuito y Adaptación de Firmware || 14 Horas || 42 TS | ||
| + | |} | ||
| + | TODO:Diseñar las tapas para el área de los actuadores lineales y muñeca . | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 7 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Diseño de tapas para actuadores lineales y muñeca || 12 Horas || 36 TS | ||
| + | |} | ||
| + | |||
| + | Nota: A causa de incidente con el circuito electrónico en la entrega de prótesis de Javier, se ha prestado la tarjeta ESP32, el circuito se ha desintegrado. | ||
| + | TODO: Reemplazar la tarjeta por Arduino Nano, reconstruir el circuito y adaptar la programación de firmware para Arduino Nano | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 6 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Conexión de sensor muscular y Programación de Firmware || 12 Horas || 36 TS | ||
| + | |} | ||
| + | TODO:Diseñar las tapas para el área de los actuadores lineales y muñeca . | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Domingo 4 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Diseño de Circuito de Alimentación (Baterías) || 6 Horas || 18 TS | ||
| + | |} | ||
| + | TODO:Diseñar las tapas para el área de los actuadores lineales y muñeca . | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Sabado 3 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Diseño de arnés || 6 Horas || 18 TS | ||
| + | |} | ||
| + | TODO:Diseñar las tapas para el área de los actuadores lineales y muñeca . | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 2 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Instalación de Pieza de unión entre Socket y Codo || 6 Horas || 18 TS | ||
| + | |} | ||
| + | TODO:Diseñar las tapas para el área de los actuadores lineales y muñeca . | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 1 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Diseño de Pieza de unión entre Socket y Codo || 6 Horas || 18 TS | ||
| + | |} | ||
| + | TODO:Diseñar las tapas para el área de los actuadores lineales y muñeca . | ||
| + | |||
| + | === Marzo 2021 === | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 31 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Diseño de tapa para motores dactilares || 4 Horas || 12 TS | ||
| + | |} | ||
| + | TODO:Diseñar las tapas para el área de los actuadores lineales y muñeca. | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 30 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Distribución de cableado, Interconexión de modulos electrónicos y Programación de Firmware || 4 Horas || 12 TS | ||
| + | |} | ||
| + | TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma. | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 29 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Distribución de cableado, Interconexión de modulos electrónicos y Programación de Firmware || 4 Horas || 12 TS | ||
| + | |} | ||
| + | TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma. | ||
| + | |||
| + | === Marzo 2021 === | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Domingo 28 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Distribución de cableado, Interconexión de modulos electrónicos y Programación de Firmware || 4 Horas || 12 TS | ||
| + | |} | ||
| + | TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma. | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Sabado 27 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Distribución de cableado, Interconexión de modulos electrónicos y Programación de Firmware || 4 Horas || 12 TS | ||
| + | |} | ||
| + | TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma. | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 26 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Distribución de cableado, Interconexión de modulos electrónicos y Programación de Firmware || 4 Horas || 12 TS | ||
| + | |} | ||
| + | TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma. | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 25 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Distribución de cableado, Interconexión de modulos electrónicos y Programación de Firmware || 4 Horas || 12 TS | ||
|} | |} | ||
| + | TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma. | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 24 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Distribución de cableado, Interconexión de modulos electrónicos y Programación de Firmware || 8 Horas || 24 TS | ||
| + | |} | ||
| + | TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma. | ||
| − | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| − | ! | + | ! Martes 23 |
| − | ! | + | ! Descripción |
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Distribución de cableado, Interconexión de modulos electrónicos y Programación de Firmware || 8 Horas || 24 TS | ||
| + | |} | ||
| + | TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma. | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 22 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Distribución de cableado, Instalación y prueba de Acelerómetro de Rotor de Brazo || 8 Horas || 24 TS | ||
| + | |} | ||
| + | TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma. | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Domingo 21 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Diseño de Circuito Electrónico y test iniciales de movimientos en actuadores de codo, brazo y muñeca || 8 Horas || 24 TS | ||
| + | |} | ||
| + | TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma. | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Sabado 20 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Ensamble Final de motores dactilares, Adecuación de espacio para circuito electrónico en la pieza estructural del brazo || 8 Horas || 24 TS | ||
| + | |} | ||
| + | TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma. | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 19 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Ensamble Final de mecanismos de Rotor de codo y Rotor de brazo. Distribución de cableado || 5 Horas || 15 TS | ||
| + | |} | ||
| + | TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma. | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 18 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Ensamble de dedos y mecanismos, modificación electrónica de servo-motores || 5 Horas || 15 TS | ||
| + | |} | ||
| + | TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma. | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 17 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Ensamble de Mecanismo de Rotación de Muñeca con servos lineales || 5 Horas || 15 TS | ||
| + | |} | ||
| + | TODO:Ensamblar las falanges de los dedos y sus Actuadores | ||
| + | Diseñar puntos de anclaje para los actuadores lineales en la muñeca. | ||
| + | Diseñar las tapas para el área de los actuadores lineales, muñeca y palma. | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 15 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Limpieza de Modelos Impresos, Ensamble de Motor de Rotación de Brazo|| 5 Horas || 15 TS | ||
| + | |} | ||
| + | TODO:Imprimir Piezas Faltantes del mecanismo de rotación de muñeca. | ||
| + | Diseñar puntos de anclaje para los actuadores lineales en la muñeca. | ||
| + | Diseñar las tapas para el área de los actuadores lineales, muñeca y palma. | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 10 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Modelado de Sistema de Rotula para rotación de muñeca|| 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 9 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Adecuación de espacio para Tarjeta Controladora|| 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 8 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Modelado de Sistema de Rotula para rotación de muñeca || 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Domingo 7 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Modelado de Soporte para Motores Lineales || 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Sabado 6 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Modelado de Piezas Estructurales del brazo || 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 5 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:382172 Johan Garcia] || Impresión y acabados || 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 4 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Se hizo el modelo del soporte de motor para pulgar, fue enviado a impresión 3D || 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 3 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Se terminó el modelo de la palma de la mano derecha con sus modelos accesorios y se enviaron a impresión || 10 Horas || 30 TS | ||
| + | |} | ||
| + | |||
| + | TODO: -Modelar la pieza estructural del brazo de acuerdo a las medidas de los actuadores y las medidas del beneficiario. | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 2 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Se continuó la Impresión 3D de las falanges de los dedos de la mano derecha, Se modificaron los modelos de la palma para la nueva configuración de motores || 15 Horas || 45 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:988159 Jully Homez] || Diseño 3D de motor de codo para montaje en software 3D || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | TODO: -Modelar la pieza estructural del brazo de acuerdo a las medidas de los actuadores y las medidas del beneficiario. | ||
| + | |||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 1 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Se inició la Impresión 3D de las falanges de los dedos de la mano derecha, Se continuó con el analisis del mecanismo de rotación de muñeca. || 15 Horas || 45 TS | ||
| + | |||
| + | |} | ||
| + | |||
| + | TODO: -Modelar la pieza estructural del brazo de acuerdo a las medidas de los actuadores y las medidas del beneficiario. | ||
| + | -Modelar el motor del codo para simulación del ensamble en software 3D. | ||
| + | |||
| + | === Febrero 2021 === | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Domingo 28 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Modelado 3D de dedos y palma || 8 Horas || 24 TS | ||
| + | |||
| + | |} | ||
| + | |||
| + | TODO: -Iniciar el diseño de la mano para impresión de los dedos el dia Lunes 1ro de Marzo 2021 | ||
| + | -Modelar el motor del codo para simulación del ensamble en software 3D | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Sabado 27 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:382172 Johan García] || Asistencia psicologica, temas legales, toma de medidas || 2 Horas || 6 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Asesoría en diseño, mecánica y electrónica || 2 Horas || 6 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:924818 Andres Camilo Sanchez] || Asistencia a entrevista para planeación del desarrollo de la prótesis || 2 Horas || 6 TS | ||
| + | |||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 26 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabián Bustos] || Analisis de datos, mecanismos y medidas || 6 Horas || 18 TS | ||
| + | |||
| + | |} | ||
| + | |||
| + | TODO: -Iniciar el diseño de la mano para impresión de los dedos el dia Lunes 1ro de Marzo 2021 | ||
| + | -Modelar el motor del codo para simulación del ensamble en software 3D | ||
| + | |||
| + | === Noviembre 2020 === | ||
| + | |||
| + | == Semana del 17 al 20 de Noviembre == | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miércoles 18 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Entrega presencial del montaje eléctrico, se realizaron las pruebas pertinentes de los sensores y actuadores y se concluye el trabajo. || 2 Horas || 6 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Entrega presencial del montaje eléctrico, se realizaron las pruebas pertinentes de los sensores y actuadores y se concluye el trabajo. || 2 Horas || 6 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 17 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se tomaron todos los componentes que hacen parte del circuito para probarlo de forma independiente al montaje de la mano, tras realizar las nuevas conexiones se logra hacer funcionar de forma adecuada el montaje eléctrico. || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Se tomaron todos los componentes que hacen parte del circuito para probarlo de forma independiente al montaje de la mano, tras realizar las nuevas conexiones se logra hacer funcionar de forma adecuada el montaje eléctrico. || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | == Semana del 9 al 13 de Noviembre == | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 13 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Debido a los inconvenientes presentados en cuanto al diseño, se decide concluir la parte electrónica de la prótesis de forma que solo deba modificarse el diseño de la misma. || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Debido a los inconvenientes presentados en cuanto al diseño, se decide concluir la parte electrónica de la prótesis de forma que solo deba modificarse el diseño de la misma. || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 12 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Según lo acordado se plantea hacer uso de un diseño previamente sugerido ya que se adecua de mejor forma a las dimensiones de la prótesis, por lo que se inició el diseño de un nuevo antebrazo que tuviera el espacio para que la parte electrónica tuviera lugar. || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Según lo acordado se plantea hacer uso de un diseño previamente sugerido ya que se adecua de mejor forma a las dimensiones de la prótesis, por lo que se inició el diseño de un nuevo antebrazo que tuviera el espacio para que la parte electrónica tuviera lugar. || 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miércoles 11 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Trabajo presencial en la fundación para ensamblaje de la prótesis, se descubrieron algunos errores en las piezas diseñadas y se propone hacer uso de otras piezas que hacen parte de la mano. || 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Trabajo presencial en la fundación para ensamblaje de la prótesis, se descubrieron algunos errores en las piezas diseñadas y se propone hacer uso de otras piezas que hacen parte de la mano. || 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 10 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Documentación || 6 Horas || 85 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Se recogieron las piezas de la mano para ensamblar con el ninja flex, pues tocó abrir más huecos a los dedos para que el movimiento fuera tanto para cerrar la mano como para abrirla, se montó a cada dedo para poder realizar las pruebas en la fundación el 11 de noviembre || 7 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 9 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Documentación || 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Se subió la segunda parte de la documentación a la wiki, se realizó una reunión para determinar la entrega del proyecto y se organizó un espacio con el grupo para el Martes 10 de noviembre terminar el ensamblaje de la mano || 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | == Semana del 3 al 6 de Noviembre == | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 6 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se probó utilizando compuertas logicas, efectivamente funciona pero no hay tanto espacio, por mas de que se ponga en váquela, se dejará la novedad para futuras innovaciones. || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Se subió una parte de la documentación a la wiki y se organizó la información con tal de que quedara en orden de realización || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 5 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se probó utilizando un conmutador para conectar dos baterías en sería para generar los 10V que se necesitan, sin embargo, es complejo puesto que solo carga una de las dos celdas, no resulto viable || 4 Horas || 12TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miércoles 4 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se utilizó una batería auxiliar para cargar el dispositivo, sin embargo el motor del brazo sigue demandando mucha energía, es posible que no sea suficiente y se deban utilizar dos baterías. || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Se trabajó en la documentación del proyecto, recopilación de las imágenes y organización de las fases en que se dió el desarrollo y diseño del socket || 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 3 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Trabajamos en la fundación los temas de tratamiento de piezas y funcionamiento de ensamble de la prótesis completa. Se corrigieron errores de otra prótesis. || 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Se trabajó en la fundación haciendo el ensamble de los dedos, se abrieron huecos para insertar en ellos el ninja flex || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | === Octubre 2020 === | ||
| + | |||
| + | == Semana del 26 al 30 de octubre == | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 30 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Trabajamos en la fundación con la prótesis de otro paciente || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Documentación de la sección de diseño de socket, se realizó una guía que incluyera el proceso de elaboración, toma de medidas, ajustes y acabados finales del socket y del liner para socket. || 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 29 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se cambió el montaje eléctrico dado que el modulo de carga y descarga no esta cargando las baterías. || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Recopilación de imágenes y redacción de la primera parte de documentación de la sección de diseño de socket. || 4 Horas || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miércoles 28 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se corrigió la programación puesto que el motor no gira con la velocidad deseada. El motor requiere de una alta cantidad de energía y resulta que no gira con la velocidad deseada porque no cuenta con la potencia energética. || 4 Horas || 12 TS | ||
|- | |- | ||
| − | | [https:// | + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Recopilación de la información acerca del proceso de toma de medidas, diseño y ajustes de los primeros modelos de socket para iniciar documentación en la wiki del proyecto. || 4 Horas || 12 TS |
|} | |} | ||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| − | ! | + | ! Martes 27 |
| − | ! | + | ! Descripción |
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se programó el dispositivo para invertir el sentido de giro del motor || 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Envío de diseños por separado para la impresión, confección de liner para socket, se realizaron 4 modelos de diferentes medidas para asegurar un modelo de liner apto para el beneficiario, esto realizado teniendo las medidas tomadas del brazo. || 4 Horas || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 26 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
|- | |- | ||
| − | | [https:// | + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Las piezas quedaron sin las perforaciones para que las atraviese los materiales, para ello se volvieron a perforar. || 6 Horas || 18 TS |
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Cotización y compra de tela 8001 para liner del socket, investigación de resistencias de calor para máquina termoformadora || 7 Horas || 21 TS | ||
|} | |} | ||
| − | == | + | == Semana del 19 al 23 de octubre == |
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 23 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Investigación sobre materiales para la hoja de la termoformadora || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || tratamiento mecánico sobre las piezas, se realizaron perforaciones para que ellas puedan moverse como se había planteado. || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Búsqueda de elastano (tela) en textileras, verificación de las medidas tomadas del escáner de muñón con el socket diseñado || 7 Horas || 21 TS | ||
| + | |} | ||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| − | ! | + | ! Jueves 22 |
| − | ! | + | ! Descripción |
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Diseño de nuevo marco circular para la hoja en la maquina de vaciado || 4 horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Recogí las piezas, tratamiento mecánico sobre las mismas. En esta ocasión quedaron sin los errores cometidos sobre la primer muestra de piezas impresas, sin embargo debemos de hacer los huecos sobre las mismas para que estas funcionen correctamente || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Investigación material antideslizante para evitar que el liner se salga del socket, el cual puede ser látex líquido. Selección de un material para el liner, elastano material sintético que permite la transpiración y es de secado rápido, lo cual evita laceraciones e irritación en la piel || 6 Horas || 18 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miércoles 21 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Diseño de la caja superior de la maquina en la que van las resistencias y soporte || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Dadas las dimensiones de las impresiones se esta investigando en nuevas alternativas para satisfacer las necesidades energéticas || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Investigación de los diferentes materiales que pueden utilizarse para el liner del socket, precios y características que permiten la transpiración en el material, consulta de las resistencias de calor, circuito y conexión para la máquina de vaciado || 6 Horas || 18 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 20 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Diseño de la caja de vaciado y marco de la hoja|| 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se diseño un circuito con una batería auxiliar para soportar la cantidad de actuadores || 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Búsqueda de diferentes referencias de bombas de vacío y sobre el sistema eléctrico relacionado con el calentamiento del material. || 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 19 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Investigación sobre la variables que influyen en la maquina de vaciado, sobre la presión y las etapas del proceso con relación a las etapas de construcción y sobre el sistema eléctrico || 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Prueba con los motores sobre los dedos. Seguimos trabajando sobre la etapa de potencia pues las baterías funcionan pero se descargan muy rápido dada la cantidad de actuadores que tenemos || 6 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Investigación sobre los costos del liner para prótesis según el material del que están hechos, análisis del material: según la actividad que se tenga se puede elegir un material para el liner. || 6 Horas || 18 TS | ||
| + | |} | ||
| + | == Semana del 13 al 16 de octubre == | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 16 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Ajustes en orificios de los dedos para los hilos, finalización de base para servomotores y ajusten en orificio para unión entre mano y antebrazo || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Interacción mecánica de las piezas con los motores. Se debe de volver a imprimir las piezas que se habían impreso dados los errores que se han cometido dentro de la etapa de diseño, impresión y post tratamiento || 5 Horas || 15 TS | ||
|- | |- | ||
| − | | [https:// | + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Investigación sobre materiales que pueden ir en el interior del socket (en contacto con el brazo) y corrección de unos segmentos del socket que debían pulirse, investigación sobre el principio de funcionamiento de la máquina de vaciado || 6 Horas || 18 TS |
|} | |} | ||
| − | == | + | {| class="wikitable sortable collapsible" |
| + | ! Jueves 15 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || finalización de ajustes de la primera parte del antebrazo y ajuste de posición para servomotores || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Pulido de los encajes de los dedos || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Seccionamiento del socket para imprimir partes más pequeñas y apertura de los orificios para insertar la banda que asegura el socket al brazo, investigación de los materiales que pueden ayudar a dar un mejor ajuste del socket al brazo || 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miércoles 14 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Ajustes en orificios de la palma de la mano y de orificios en la primera parte del antebrazo || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Unión mecánica delas piezas || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Unión de las piezas del socket que van acopladas al antebrazo y apertura del orificio en el que encaja el motor, investigación sobre tipos de bombas de vacío (precios, características técnicas) || 5 Horas || 15 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 13 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Finalización ajustes en los dedos para la unión de los mismos entre ellos y con la mano || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Tratamiento mecánico de las piezas || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Ajustes de la cavidad del motor en el socket según el diseño del antebrazo || 5 Horas || 15 TS | ||
| + | |} | ||
| − | == | + | == Semana del 5 al 9 de octubre == |
| − | + | {| class="wikitable sortable collapsible" | |
| − | + | ! Viernes 9 | |
| − | + | ! Descripción | |
| − | + | ! Tiempo | |
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Ajustes en la unión de las partes de los dedos y ajustes del motor antebrazo || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || El circuito funciona pero por algún motivo no se mueve a una velocidad prudente para la aplicación || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Ajustes del socket y empalme del motor con el antebrazo || 5 Horas || 15 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 8 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Finalización de modificaciones en el antebrazo para encaje de motor y ajustes para unión de dedos || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se soldaron componentes y se conecto etapa de potencia || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Revisión de los materiales, proceso y qué otros dispositivos que pueden ser usados en la máquina de vaciado || 4 Horas || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miércoles 7 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Modificaciones diseño de antebrazo para acomodar el motor que encaja entre el antebrazo y el socket || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Desplazamiento a la fundación para recoger piezas || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Modificaciones al diseño para adaptar motor y unión con el antebrazo || 5 Horas || 15 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 6 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Diseño de espacio para el servomotor en el antebrazo para el encaje con el socket || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se desarrolla una etapa de potencia para el circuito || 6 Horas || 018 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Reunión con Sebastián y Melissa para definir el nuevo compartimento del motor para el socket, ajustes al anterior diseño para adaptar el motor || 5 Horas || 15 TS | ||
| + | |} | ||
| − | = | + | {| class="wikitable sortable collapsible" |
| + | ! Lunes 5 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Revisión bibliográfica acerca de las variables que definen el prceso de la maquina de vaciado y una revisión acerca de las maquinas ya existentes en el mercado || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se corrigió el sentido de giro del motor ||6 Horas || 018 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Diseño de socket con ajustes y revisión del proceso de vaciado de distintas máquinas || 5 Horas || 15 TS | ||
| + | |} | ||
=== Septiembre 2020 === | === Septiembre 2020 === | ||
| + | |||
| + | == Semana del 28 de septiembre al 3 de octubre == | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 2 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Finalización de diseño de tornillo de acople para mano y antebrazo, investigación de diseños de maquina de vaciado || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se hicieron pedidos de piezas para añadir al circuito. Existen componentes electrónicos que deben ser medidos dentro de la practica para solicitar nuevas piezas concorde a lo que se ha diseñado y planeado || 5 Horas || 015 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Cambios en la propuesta de socket para adaptar al largo del brazo || 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 1 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Ajustes diseño de motor, diseño de acople de tornillo en mano y antebrazo || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se diseño una red de carga y descargar a partir de un integrado que permite el flujo de cargas sin afectar el sistema || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Ajustes al nuevo diseño de socket, se plantea una forma adaptar el largo del socket para complementar el largo del brazo || 5 Horas || 15 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miércoles 30 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || diseño de motor que da el movimiento del brazo para luego hacer el engranaje a la medida exacta del motor y del eje de este || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se diseño la red de carga del circuito || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Diseño de la nueva propuesta de socket con los ajustes comentados e investigación de algunos diseños que complementan el diseño propuesto || 5 Horas || 15 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 29 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || cambios y ajustes en el diseño del encaje para los servomotores en en el antebrazo sin embargo, falta definir cual es el tamaño de los servos, diseño engranaje de los dedos y reunión de definición de cambios || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Trabajo en esquemático para potencia del circuito || 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Diseño de las dos propuestas de socket y reunión con Johan y el equipo de trabajo para determinar el socket definitivo con los cambios comentados || 5 Horas || 15 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 28 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Encaje de servomotor en antebrazo, reunión con Sebastián y Salome para la definición del encaje del motor que tiene el movimiento del antebrazo y el socket, documentación || 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Investigación ene energía y potencia || 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Reunión con Melissa y Sebastián para definir cómo sería el encaje del antebrazo con el socket y trabajo en las dos propuestas de socket planteadas || 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | == Semana del 21 al 26 de septiembre == | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 25 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Finalización del antebrazo || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Diseño de fuente de energía portable || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Diseño de socket: Moldeado y pulido del diseño. || 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 24 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Diseño de antebrazo, adecuación a medidas del beneficiario y adecuación de las falanges de los dedos || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Diseño fase de potencia || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Diseño de socket para el brazo derecho y ajustes del mismo || 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 23 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Nuevo diseño de la mano, adecuación para el sistema electrónico || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Diseño de distribución energética y fuente de alimentación. Se utilizaron baterías, sin embargo se descargaron rápidamente || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Correcciones del diseño, al tomar el molde/socket no se podía separar del escanner tomado || 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 22 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Nuevo diseño de la mano, adecuación para el sistema electrónico || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Diseño de un sensor artesanal, experimento fallido por cuestiones de diseño || 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Correcciones del diseño, al tomar el molde/socket no se podía separar del escanner tomado || 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 21 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Estudio de caso sobre las fallas en la impresión de la mano y estudio del nuevo diseño || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Diseño de la red de motores a usar || 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Diseño de socket, dimensionamiento de medidas en el programa || 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | == Semana del 14 al 18 de septiembre == | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 18 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Diseño engranaje para servomotor de la mano y diseño antebrazo || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se desarrollo el recorrido con el mismo sensor para ambos motores || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Diseño de socket y corrección de imperfecciones en el escanner || 5 Horas || 15 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 17 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Diseño de antebrazo, ajuste del espacio para los servo motores del antebrazo || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se realizó un on/off para el circuito completo con el fin de no gastar energía y aprovecharla || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Documentación y diseño de socket en Rhinoceros y ajustes del escaneado || 5 Horas || 15 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miércoles 16 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Corrección en el diseño en el momento de remover la marca de la tapa de la palma de la mano || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Finalmente se comprobó que el driver con el que venia la prótesis no se encuentra en buen estado, ademas, para mover el motor se necesita de una fuente de voltaje grande lo que genera mayor peso en el diseño de la prótesis ademas de un diseño mas robusto. Se esta buscando la forma de alternar entre eficiencia y peso utilizando los mismos componente. Ahora se proyecta utilizar baterías recargables en serie para mover el motor que hace parte del codo || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Al hacer la reconstrucción en el programa skanect seguían quedando vacíos en aquellas partes que no fueron escaneadas correctamente, además de que quedaban secciones con irregularidades, por lo que se plantea hacer la reconstrucción en el programa Rhinoceros. || 6 Horas || 18 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 15 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Investigación de diseños para la parte del brazo y encaje con el antebrazo, ajustes del diseño de antebrazo para el brazo || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se encontró en la electrónica que el motor se puede mover sin embargo no presenta na alta velocidad pero si un gran toque. Para corroborar eso se utilizo un puente H integrado que corresponde a la referencia L293D || 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || De acuerdo con el escanner realizado se inicia la reconstrucción de las partes que no fueron escaneadas completamente ya que quedaban vacios, se hace la reconstrucción de esas partes en el programa skanect || 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 14 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Documentación, reunión con salome para la decisión del proyecto de la maquina de vaciado para socket, trabajo en el antebrazo || 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || El motor presentó de nuevo vibraciones pero en ningún momento presento un giro, para ello se opto por comprobar con otro motor si la programación estaba mal y resulta que el motor que se utilizó tampoco funcionaba || 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Reunión con Melissa para decidir entre el proyecto de máquina de inyección y la máquina de vaciado para socket, investigación y reunión con el beneficiario Andrés Camilo para toma del scanner y molde de yeso del muñón derecho || 12 Horas || 36 TS | ||
| + | |} | ||
| + | |||
| + | == Semana 7 de 11 de septiembre == | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 11 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Ultimos arreglos en el diseño de la mano y revisión bibliografica acerca de la maquina de inyección || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se desoldó los cables del motor paso a paso y se cambio por uno nuevos. Ahora el motor vibra por lo que se asume que esta funcional; es cuestión de trabajar en el sentido de giro del motor || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Documentación y revisión de estrategias para el proyecto de máquina de vaciado para socket || 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 10 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Trabajo en palma de la mano || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Al utilizar la programación documentada por los compañeros anteriores se evidencio que hay un problema físico que debemos corregir. || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Lectura del manual para impresión 3D y revisión de cómo usar el programa skanect || 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miércoles 9 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Documentación y mejora en diseño de la mano || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Cambio de cables y de programación sobre el motor paso a paso || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Visualización del video de escaneado en 3d con skanect (introducción), Lectura de material: Manuales de buenas prácticas para impresión 3D, Revisión de material ARTISTA || 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 8 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Ajustes diseño antebrazo || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Cambio de driver para el motor || 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Investigación sobre tipos de prótesis y socket - Tipos de materiales que se utilizan || 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 7 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Modificaciones de diseño de antebrazo || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Investigación de una nueva programación y edición de la misma || 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:701458 Salomé Pérez] || Inducción de la plataforma de Utopia Maker e investigación || 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
== Semana 31 de agosto 4 de septiembre == | == Semana 31 de agosto 4 de septiembre == | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 4 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Ajuste de diseño de antebrazo para encaje con la mano || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se programo el motor paso a paso que se ubica en el codo del prototipo || 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 3 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Finalización en el diseño de la mano, encaje de la palma con la base || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se investigo en nuevas alternativas a piezo electricos para poder someterlos a diferentes superficies y fuerzas para evaluar cual aporta un mejor resultado de acuerdo al diseño planteado || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 2 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Finalización diseño de la palma de la mano || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se adquirió un motor nuevo por 15K COP, el motor fue sometido ante un nuevo programa y se obtuvieron resultados positivos pues logra evidenciar la fuerza, de forma binaria, que se le aplica al sensor. || 4 Horas || 12 TS | ||
| + | |} | ||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| Line 58: | Line 1,692: | ||
|- | |- | ||
| [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Trabajo en el diseño de la mano en rhinoceros || 5 Horas || 15 TS | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Trabajo en el diseño de la mano en rhinoceros || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Efectivamente el programa que se utilizo mas la aplicación de una fuerza sobre el motor termino por deteriorarlo. Se procede a investigar nuevas alternativas a estos motores || 6 Horas || 18 TS | ||
|} | |} | ||
| Line 67: | Line 1,703: | ||
|- | |- | ||
| [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Trabajo en el diseño de la mano en tinkercad || 6 Horas || 18 TS | | [https://es.utopiamaker.com/m3duto/user:268907 Melissa Villanueva] || Trabajo en el diseño de la mano en tinkercad || 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastian R.] || Se logró realizar un movimiento con el piezo electrico sobre el motor, sin embargo el programa no resulta estable || 6 Horas || 18 TS | ||
|} | |} | ||
Latest revision as of 19:32, 2 October 2021
Contents
- 1 Presentación
- 2 Desarrolladores y Recursos
- 3 Etapas de Desarrollo
- 4 Registro de TS
- 5 Semana del 17 al 20 de Noviembre
- 6 Semana del 9 al 13 de Noviembre
- 7 Semana del 3 al 6 de Noviembre
- 8 Semana del 26 al 30 de octubre
- 9 Semana del 19 al 23 de octubre
- 10 Semana del 13 al 16 de octubre
- 11 Semana del 5 al 9 de octubre
- 12 Semana del 28 de septiembre al 3 de octubre
- 13 Semana del 21 al 26 de septiembre
- 14 Semana del 14 al 18 de septiembre
- 15 Semana 7 de 11 de septiembre
- 16 Semana 31 de agosto 4 de septiembre
Presentación
Los desarrollos en tecnología son cada vez más impresionantes, con posibilidades cada vez más amplias y funcionales en varios escenarios de la industria y las telecomunicaciones, por mencionar algunas. Desde 2012 la Fundación M3D ha sido un centro de Investigación en Bioingenieria donde se han logrado avances importantes en el estudio de la Biónica de Brazo, generando a su vez soluciones protésicas de brazo para sus beneficiarios en Colombia.
Después de recopilar y analizar los antecedentes de las tecnologías disponibles, teniendo en cuenta las soluciones entregadas hasta la fecha, sus resultados e interacción con el usuario, hemos optimizado los procesos para la generación de modelos y software para ofrecer a nuestros beneficiarios nuevas soluciones para casos de prótesis transhumeral, hemos decidido generar una ayuda biomecánica para Andrés Camilo que sea de utilidad para sus tareas cotidianas básicas, esta se diseñará y se construira con la posibilidad de generar mecanicamente movimientos y posiciones muy naturales, un set de funciones básicas en su programación, la cual puede ser actualizada posteriormente para llegar a niveles más elevados de dificultad de control y hasta sensación si se desea integrar redes adicionales de sensores en el futuro. La parte estética de la solución será un equilibrio entre la idea de personalización que el usuario desee, la forma de los actuadores y partes estructurales esenciales para el funcionamiento de la prótesis, es importante que aunque la protesis presente una apariencia personalizada, también sea posible mantener una presentación formal básica y funcional, para esto se utilizaran paneles removibles para mantener una forma básica y neutral.
Desarrolladores y Recursos
| Jefes de Proyecto | Desarrolladores | Contabilidad | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
|





Etapas de Desarrollo
Evaluación Antropométrica
En esta sección se recopila toda la información dimensional del caso para analizar la construcción a escala real un ensamble detallado de la pròtesis en software 3D, contiene los datos de las sesiones de toma de medidas junto con el scan 3D o modelado por fotogrametría de la extremidad, datos necesarios para realizar una correcta distribución antropométrica, lo que nos dara las posiciones apropiadas para los actuadores electro-mecánicos, sensores, tarjetas de control y demás componentes funcionales de la solución.
Diseño Socket

El socket es la porción de la prótesis que se acomoda alrededor del muñón a la cual se conectan los demás componentes, es una parte importante de la prótesis pues tiene la función de alojar el muñón, desempeñando funciones de apoyo, control e interacción entre el beneficiario y el miembro artificial. Este elemento permite el contacto total entre el socket y el miembro residual, evitando movimientos inadvertidos y posibles lesiones causadas por concentraciones incómodas de presión. El proceso de construcción del socket tuvo varias etapas, desde la toma inicial del molde en yeso del muñón, hasta la construcción del socket definitivo. Para la primera etapa se tomó el molde en yeso, se hizo la toma de medidas y el escáner del mismo; para el escáner del muñón se utilizó el programa skanect, el cual consta de un dispositivo que escanea el miembro con un Kinect y la imagen captada es digitalizada para guardar la forma y luego trabajar sobre esta en un programa de diseño.
Para la segunda etapa, el diseño, se realizó un estudio de los tipos de socket que son usados en la actualidad y las ventajas que ofrece cada uno hasta llegar a un modelo que se acopla correctamente a la anatomía del beneficiario, se usó el programa Rhinoceros 3d, este programa nos permitió diseñar cada capa del socket y suavizar los acabados del mismo, la forma fue captada desde el escáner captado en la etapa de toma de medidas. Para este diseño se tuvo en cuenta el encaje que tendría a la parte del antebrazo, se tuvo en cuenta el anclaje de un motor dc a la parte inferior del socket, el cual también encaja desde su eje al antebrazo para permitirle la movilidad al resto del brazo, además de una pieza que le da más resistencia ante los movimientos propios de la prótesis.
Se tuvo en cuenta que para hacer uso de una prótesis debe haber algún material que proteja el muñón de posibles lesiones que puede causar el uso de la prótesis, pues al estar en contacto directo con la piel se pueden generar daños o irritación en la piel, para esto se diseñó un liner, se trata de una cubierta protectora hecha de un material flexible, acolchado, que permite la transpiración de la piel y tiene secado rápido. Se coloca sobre el muñón de forma que lo cubra para reducir el roce entre la piel y el encaje protésico (socket). Para el liner se realizó un estudio de los materiales que tienen las propiedades previamente mencionadas, por lo que finalmente se diseñó con un material llamado elastano, siguiendo las medidas del muñón y añadiendo pequeños puntos de látex líquido en el exterior del liner con el fin de que evitara el movimiento en el socket.
Posterior al diseño e impresión del socket se pulieron las piezas en la máquina de acabados para retirar algunas partes sobrantes que fueron impresas, para luego ensamblar todas las piezas del socket y hacer la unión con el motor dc y el antebrazo.

Vista Frontal

Calculo de Proporciones

Imagen 1: Molde en yeso del brazo derecho

Imagen 3: Diseño de socket

Arnés Vista Frontal

Arnés Poterior

Arnés Detalle Hombro

Arnés Detalle Espalda






Diseño de Prótesis
- Personalización
Andrés ha elegido el estilo que quiere para su prótesis, se trata de el videojuego CREED, el personaje utiliza vestiduras de tela y una armadura de brazo, tipo guerrero medieval, utiliza algunas armas que tienen detalles y grabados de los la que también se pueden sacar superficies y formas relacionadas al juego, en las superficies mas visibles de la mano incluirá algunos logos del juego, es importante tener en cuenta que el usuario puede no querer tener siempre la misma apariencia, por lo que el diseño de la parte gráfica debe ser hecho sobre páneles o covers removibles e independientes del sistema mecánico/electrónico y sin afectar su apariencia basica estética de mano biónica, asi serán facilmente retirados o reemplazados por otros nuevos. La parte del codo bajo el socket se construirá como un brazo robótico con apariencia un poco plana, sin muchas curvas, debido a que el espacio es mayormente ocupado por los motores y las estructuras de soporte, la mano es un modelo ya utilizado para la Prótesis de Erick Yate, este se modificará por segunda vez para mejorar algunos detalles en las falanges de los dedos y para integrar los actuadores que les darán movilidad. En las dos primeras imagenes de la izquierda se puede apreciar el modelo inicial de la mano, se tomarán los datos de la evaluación antropométrica para escalar los modelos de los dedos, palma y brazo a las medidas reales.

Plano Inicial

Ensamble de Actuadores y Modelos Iniciales


Nuevo Modelo de Mano


Palma Original(Izquierda) y Palma Modificada(Derecha)

Pieza de Soporte de los Dedos

Soporte Servo Dedo Pulgar








12_03_2021
Una vez realizado el diseño de la mano con sus accesorios, se realiza el diseño de una pieza/actuador de interconexion entre el brazo y el codo que le permitira ejecutar rotaciones de supinación a pronación, se trata de un servo-motor MG996R que se sitúa dentro de dos modelos cilindricos, transmitiendo un efecto de rotación sobre uno de ellos por medio de un mecanismo de piñon interno similar al planetario, el servomotor transmite movimiento al cilindro exterior, que va unido directamente al resto de la extremidad, la parte cilindrica interna contiene el servomotor y se ha integrado directamente al soporte que conecta con el eje de rotación del codo.

Ensamble de Actuador Rotor de Brazo

Motor de Giro del Brazo


Motor de Giro de Brazo y Codo Integrados
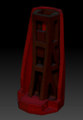
Pieza Estructural del Brazo





9_03_2021
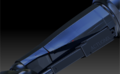
Brazo Andres Sanchez 09_03_2021


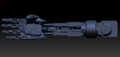
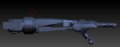
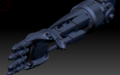





Diseño Electromecánico

- Requerimientos del Sistema
Esta prótesis será mioeléctrica, esto significa que utilizara una red de actuadores mecànicos (servo-motores), unos dispositivos de captura de señal (sensores), para tomar datos de la actividad muscular del usuario, y una etapa de proceso y toma de decisiones que sera el cerebro operacional de la pròtesis, gobernará sobre su comportamiento y su interacción con el usuario.
- Actuadores Electro-Mecánicos
Esta prótesis utilizara actuadores tipo servo-motor, de los mismos utilizados en modelos de RC, estos motores flexionaran los dedos por medio de hilos que se accionan desde las poleas de los motores, el movimiento de los dedos se reduce a un desplazamiento lineal menor a 4cm de longitud en los hilos, que es el rango entre dedos extendidos y completamente contraidos, al utilizar motores de este tipo se debe diseñar una polea compatible con el mismo teniendo en cuenta que la mitad de la circunferencia sea igual al desplazamiento del dedo, esto se debe a que el servo tiene un giro controlable de 0 a 180 grados como se muestra en la siguiente imagen.
Actuador Rotor de Brazo

Esta solución protésica tiene como propósito asemejar lo mas posible los movimientos naturales de un brazo orgánico, por esto se ha integrado un actuador posicionado entre el brazo y el codo, que le dará la posibilidad de rotar el brazo sostenido desde el codo en un rango de 180 grados, este actuador le dará a la prótesis la capacidad de efectuar posiciones de supinación y pronación del brazo, este mecanismo se impulsa por medio de un servo-motor MG995R de 9.4kg/cm de torque, su piñonería metálica estará unida a un mecanismo tipo piñón interno que será también un multiplicador de torque por un factor de 2 y que gracias a su forma presenta una ubicación perfecta del actuador y el punto de unión con la pieza estructural del brazo.

Mecanismo Tipo Piñón Interno

Diseño de Rotor de Brazo con Mecanismo Tipo Piñón Interno
Ensamble Rotor de Brazo



Los actuadores electro-mecánicos son en su mayoría servo-motores de rotación angular máxima de 180 Grados, de estos contamos dos unidades MG996R de 11Kg de torque, cada uno controlando dos dedos, en la configuración (indice, medio - anular, menique). Para el dedo pulgar utilizaremos temporalmente un MG90S de 2.2Kg, el cual puede mejorar para tener un agarre mas efectivo. Para las funciones de extensión, flexión, aducción, abducción, más la libre circunducción de la muñeca usaremos la combinación de dos actuadores lineales Actuonix L-16-50-R con 50mm de desplazamiento cada uno.
Actuadores Lineales Actuonix de 50mm Test
Continuando hacia el codo encontramos un servo-motor MG996R de 11Kg de torque, el cual ha sido ensamblado en un mecanismo que rota el ensamble del brazo y convierte ese punto en un grado adicional de libertad, finalmente encontramos en el codo un motor-reductor de 10rpm de alto torque, a este se debe instalarse un sensor de posición y una tarjeta controladora para controlarlo en modo lazo cerrado.

Servo MG92B (Pulgar)

Ubicación Servo Pulgar

Servo MG995 (Indice-Medio, Anular-Meñique)
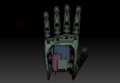
Ubicación de Servos Modificados

Servos Modificados Integrados en Modulo

Actuador Lineal L16 (Rotación de Muñeca)






Fuentes de Datos:
Tabla de edad vs fuerza de agarre en mano (humano masculino)
- Sensores

Para obtener lectura de la actividad muscular utilizamos un sensor infrarrojo de proximidad, el cual se ha fijado a un lugar especifico del socket de la protesis, este sensor toma la distancia resultante de una contracción muscular por medio de una barrera de luz infrarroja, el microcontrolador saca un promedio de 10 muestras para eliminar posibles picos ocasionados por ruido, la señal se escala a los rangos definidos por el boton selector de actuadores.
28/03/2021 Con el objetivo de implementar un control inteligente de las rotaciones de los actuadores Rotor de Codo y Rotor de Brazo, se han instalado dos modulos tipo Giroscopo/Acelerómetro, con los cuales el procesador puede tener una referencia de posición con respecto a la gravedad y el espacio, con esto podemos definir limites de activación de movimientos, para evitar que la prótesis ejecute movimientos anormales o que no son de utilidad para el usuario.

Módulo Giróscopo Acelerómetro MPU6050
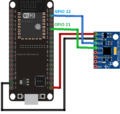
Esquematico de Conexión entre MPU6050 y Procesador ESP32

Límites de Acción de la Prótesis

SensorInfrarrojo Tipo Herradura (Sensor Muscular)
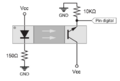
Esquematico de Conexión de Sensor Muscular
Señal de Sensor en Arduino Plotter





- Procesador Principal

Debibo a la dificultad de este proyecto se utilizara como procesador principal un microcotrolador programable ESP32 para el proceso de datos y el control directo de los actuadores, este procesador cuenta con conversor ADC de 12 bits lo que proporciona un rango de 4096 niveles por un nivel maximo de voltaje de 3.3V, lo que representa una mejora en la sensibilidad de captura de datos de entrada desde el usuario, el procesador posee tecnología de doble nucleo para el manejo simultaneo de aplicativos, tareas de control de hardware y de los modulos bluetooth y wi-fi. La capacidad de memoria, la velocidad y la arquitectura de este procesador le da a las prótesis mioeléctricas un potencial enorme, es una oportunidad para generar soluciones protésicas mas inteligentes, de alto desempeño e intuitivas para los usuarios.
- Programación

El microcontrolador captura la actividad muscular por medio del sensor conectado al pin análogo A3, posiciona los dedos y la muñeca de acuerdo al estado seleccionado por el botón selector, las posiciones se encuentran en una tabla de valores formada por 5 variables correspondientes a cada servo, de este modo una variable puede guardar varios valores de posición, ser modificada y accesible. El micro posee un led RGB como indicador visual del estado de la prótesis, a cada pulsación del boton, el led pasará a un color diferente y apuntara a nuevas variables de posición, así el usuario puede tener control total y la posibilidad de añadir multiples posiciones de uso cotidiano.
En la primera imagen se pueden apreciar los componentes necesarios para construir el circuito electrónico, en la segunda imagen se observa las conexiones de los componentes, en la tercera imagen se evidencia a tener en cuenta la posicion del sensor sobre el musculo ya que puede cambiar la señal por lo que se recomienda al beneficiario conservar siempre la misma posición para que la prótesis trabaje de manera normal.
En la imagen 4 se muestra el diagrama de flujo del programa utilizado en el ESP32, el programa basicamente toma datos del sensor, utiliza una serie de condicionales if para decidir en 4 niveles de señal si se debe mover la muñeca o los dedos, con este metodo el usuario tendrá mas control sobre su prótesis.
Codigo Protesis Andres Sanchez V1

Imagen 1:Componentes electrónicos

Circuito Electrónico de Prótesis

Imagen3: Posición de Sensores (Ejemplo)

Imagen 4: Programación



- Interfaz de Usuario

Debido a la cantidad de actuadores y los grados de libertad que posee la prótesis, se hace complicado obtener multiples señales del beneficiario para generar movimientos de accion simultánea y natural, razon por la cual hemos optado inicialmente por implementar un control secuencial de los movimientos con dos elementos de captura de señal,
El avance más importante de esta prótesis es la implementación de una interfaz gráfica siempre accesible via wi-fi desde un ordenador o telefono conectado a la red, util para mover los actuadores y obtener lectura de los sensores en tiempo real, esto actúa de este modo para detectar fallas o errores en los motores, los mecanismos y a veces los programas del chip. En segundo plano a este aplicativo sirve para acceder a las posiciones guardados en la memoria, que son elegidos por el usuario con un boton selector y ejecutados proporcionalmente por el sensor de actividad muscular, la interfaz web tiene acceso directo a la memoria de posiciones del programa, asi podemos programar movimientos y ejecutarlos de manera agil y personalizada.
Adicional a esto se instalará también una interfaz visual por medio de un led RGB indicador, que informará representará en varios colores el estado actual de la prótesis, asi el usuario cual es la acción a seguir para seguir utilizandola de manera natural, de este modo hace mas intuitiva la experiencia de usuario.
el primero es un botón ubicado en la parte interior del socket, en la parte baja del biceps, para que el usuario cambie entre los diferentes actuadores con tan solo presionar el boton, el segundo incluye un sensor de actividad muscular tipo infrarrojo, la salida de señal activa proporcionalmente los actuadores previamente activos con el boton selector

Aplicativo de Prótesis en PC

Impresión 3D y Ensamble


Se imprimen las partes de la mano en plástico PLA, es un polímero biodegradable y aprobado por la FDA para contacto seguro con humanos, aunque para evitar riesgos como alergias al material, se dispone un panel de material suave e aislante entre la piel y la superficie de contacto directo con la prótesis. las articulaciones de la mano se imprimieron con un relleno sólido para garantizar la máxima resistencia mecánica en su desempeño, la capacidad de agarre de la mano va limitada por los puntos de fricción que deben adicionarse a las falanges distales y mediales, estos pads deben imprimirse o fabricarse de material flexible y compatible con los adhesivos disponibles.
Las falanges deben hacerse deslizar una dentro de otra de manera firme y sin juego, para ensamblar con tornillos tipo M2.5 de variables longitudes, se recomienda verificar una rotación suave, alineada, repetible y sin desviaciones para garantizar un control más fino de los movimientos. Es importante tener en cuenta que la suma de la fricción que los puntos de giro del dedo generan, reducen igualmente el torque útil del motor, es entonces más conveniente una acción limpia de flexión y extensión donde son el resorte y el motor los que dominen el movimiento del dedo.
Los dedos son naturalmente extendidos por un trozo de filamento flexible de menos de 1.5mm de diámetro, el cual se instala antes que los hilos de tracción desde los motores, el hilo se pasa por los conductos de la palma superior de la mano, se dirigen por la palma y de nuevo a un segundo dedo adyacente, es decir que con un segmento de hilo flexible se genera la tensión que estira dos dedos a la vez, a una posición de mano abierta.

Impresión Dedos Andrés García

dedo Impreso

Piezas de Mano y Codo Para Ensamble

Pieza Estructural del Brazo

Conector Codo Rotor

Retenedor Servo Rotor Brazo







Tapas de Rotor de Brazo

Partes Rotor de Brazo

Ensamble Rotor de Brazo

Rotor+Brazo+Palma(sup)

Rotor+Brazo+Palma+(inf)





Registro de TS
Septiembre 2021
| Miercoles 29 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Seguir con el diseño y agregar movimiento parcial a las piezas | 4 Horas | 12 TS |

| Martes 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Seguir con el diseño | 4 Horas | 12 TS |
| Lunes 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Empezar el rediseño del antebrazo ya que no tiene espacio para los cables. Se empieza el diseño de toda la pieza | 5 Horas | 15 TS |

| Sábado 25 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Implemetación de rotor en el motor. El motor presenta fallas al momento del devolver la posición, por lo tanto se cambia el potenciometro interno del motor para que devuelva correctamente la posición | 7 Horas | 21 TS |
| Martes 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Simulación de la rotación de antebrazo | 3 Horas | 9 TS |
| Lunes 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Análisis de pieza de antebrazo y rediseño del engranaje del motor | 3 Horas | 9 TS |
| Sábado 18 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Implementación del motor del codo al código y probar su funcionamiento con tarjeta ESP32 | 7 Horas | 21 TS |
| Martes 14 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Finalización del rediseño de la pieza y prueba del control del codo con el potenciometro | 7 Horas | 21 TS |
| Lunes 13 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Rediseño de la pieza de anclaje del potenciometro por mal funcionamient y finalización de la electronica para esta pieza | 7 Horas | 21 TS |
| Viernes 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Modificación del motor y diseño de pieza para anclaje del potenciometro al motor | 7 Horas | 21 TS |

| Jueves 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Rediseño de la pieza del codo para montar sensor de posición (potenciometro) y hacer el correcto control de la prótesis | 7 Horas | 21 TS |
| Miercoles 8 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Creación del código final para el manejo de la prótesis, se validó el funcionamiento en simulación. Empezar investigación de la entrada del sensor y unión con la programación y adaptar código para el micro-procesador ESP32 | 7 Horas | 21 TS |
| Martes 7 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Fijar limites en la programación para movimiento de los motores. Arreglar nuevamente la mano | 7 Horas | 21 TS |
| Lunes 6 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Documentación de la programación para futuros usos | 7 Horas | 21 TS |
| Miercoles 1 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Arreglar motores de la mano e implementación de motores | 7 Horas | 21 TS |
Agosto 2021
| Martes 31 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Implementación de algoritmos de control en motores de la mano | 7 Horas | 21 TS |
| Lunes 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Implementación de control en motores con sistema de lazo abierto | 7 Horas | 21 TS |
| Miercoles 25 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Implementación de contrlador PID en simulación con múltiples motores | 7 Horas | 21 TS |

| Martes 24 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Mejoramiento de controlador a tipo PID, finalización de programación de controlador de lazo cerrado, implementación en la prótesis | 7 Horas | 21 TS |
| Lunes 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Finalización de la simulación y programación para los actuadores lineales con controlador tipo PI. Se logró manejar simulteanamente ambos motores | 7 Horas | 21 TS |

| Jueves 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Implementación de controlador P y PI en Proteus para la simulación del sistema | 7 Horas | 21 TS |
| Miercoles 18 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Finalizaciónd de controlador PI. Se redujo el rizado y se siguió adelantando la documentación | 7 Horas | 21 TS |
| Martes 17 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Adelanto en pieza 3d para la impresora, adelantar documentación de las librerías de arduino | 7 Horas | 21 TS |
| Miércoles 11 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Se hizo el diseño de una pieza para un soporte de la impresora. Se conectó un potenciómetro al sistema para simular la entrada de una señal y la respuesta del controlador. Ya que la respuesta tiene rizado, se empezó a programar un controlador tipo PI para manejar mejor el motor | 7 Horas | 21 TS |

| Martes 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Se empezó la creación y documentación de las librerias para manejar el motor. Se termino el controlador tipo P, ya funciona correctamente | 7 Horas | 21 TS |
| Lunes 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Se empezó la programación de funciones para controlar los motores para seguir una ubicación a través de un controlador tipo P | 7 Horas | 21 TS |
| Miercoles 4 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Se continuó con la simulación del sistema en proteus, avanzado en la programación para controlar los motores simultaneamente. | 7 Horas | 21 TS |
| Lunes 2 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Se creo una simulación de todo el montaje físico en proteus, teniendo en cuenta los drivers, los motores y el Arduino. Se programó internamente el arduino de proteus para poder hacer programación y simulaciones sin necesidad de tener que tener todo el montaje real | 7 Horas | 21 TS |
Julio 2021
| Miércoles 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Se implementó el uso de un convertidor DC-DC para manejar dos voltajes diferentes, dependiendo el moto que se vaya a usar. Se adelantó el código en Arduino para manejar múltiples motores. | 7 Horas | 21 TS |
| Martes 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Avances en el montaje de protoboard de la electrónica | 7 Horas | 21 TS |
| Lunes 26 | Descripción | Tiempo | TS |
|---|---|---|---|
| Juan González | Arreglar conexiones de la prótesis e iniciar el montaje en protoboard con los controladors | 7 Horas | 21 TS |
Abril 2021
| Viernes 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Reconstrucción de circuito y Adaptación de Firmware, | 12 Horas | 36 TS |
TODO:Diseñar las tapas para el área de los actuadores lineales y muñeca .
| Jueves 8 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Reconstrucción de circuito y Adaptación de Firmware | 14 Horas | 42 TS |
TODO:Diseñar las tapas para el área de los actuadores lineales y muñeca .
| Miercoles 7 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Diseño de tapas para actuadores lineales y muñeca | 12 Horas | 36 TS |
Nota: A causa de incidente con el circuito electrónico en la entrega de prótesis de Javier, se ha prestado la tarjeta ESP32, el circuito se ha desintegrado. TODO: Reemplazar la tarjeta por Arduino Nano, reconstruir el circuito y adaptar la programación de firmware para Arduino Nano
| Martes 6 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Conexión de sensor muscular y Programación de Firmware | 12 Horas | 36 TS |
TODO:Diseñar las tapas para el área de los actuadores lineales y muñeca .
| Domingo 4 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Diseño de Circuito de Alimentación (Baterías) | 6 Horas | 18 TS |
TODO:Diseñar las tapas para el área de los actuadores lineales y muñeca .
| Sabado 3 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Diseño de arnés | 6 Horas | 18 TS |
TODO:Diseñar las tapas para el área de los actuadores lineales y muñeca .
| Viernes 2 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Instalación de Pieza de unión entre Socket y Codo | 6 Horas | 18 TS |
TODO:Diseñar las tapas para el área de los actuadores lineales y muñeca .
| Jueves 1 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Diseño de Pieza de unión entre Socket y Codo | 6 Horas | 18 TS |
TODO:Diseñar las tapas para el área de los actuadores lineales y muñeca .
Marzo 2021
| Miercoles 31 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Diseño de tapa para motores dactilares | 4 Horas | 12 TS |
TODO:Diseñar las tapas para el área de los actuadores lineales y muñeca.
| Martes 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Distribución de cableado, Interconexión de modulos electrónicos y Programación de Firmware | 4 Horas | 12 TS |
TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma.
| Lunes 29 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Distribución de cableado, Interconexión de modulos electrónicos y Programación de Firmware | 4 Horas | 12 TS |
TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma.
Marzo 2021
| Domingo 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Distribución de cableado, Interconexión de modulos electrónicos y Programación de Firmware | 4 Horas | 12 TS |
TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma.
| Sabado 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Distribución de cableado, Interconexión de modulos electrónicos y Programación de Firmware | 4 Horas | 12 TS |
TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma.
| Viernes 26 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Distribución de cableado, Interconexión de modulos electrónicos y Programación de Firmware | 4 Horas | 12 TS |
TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma.
| Jueves 25 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Distribución de cableado, Interconexión de modulos electrónicos y Programación de Firmware | 4 Horas | 12 TS |
TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma.
| Miercoles 24 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Distribución de cableado, Interconexión de modulos electrónicos y Programación de Firmware | 8 Horas | 24 TS |
TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma.
| Martes 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Distribución de cableado, Interconexión de modulos electrónicos y Programación de Firmware | 8 Horas | 24 TS |
TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma.
| Lunes 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Distribución de cableado, Instalación y prueba de Acelerómetro de Rotor de Brazo | 8 Horas | 24 TS |
TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma.
| Domingo 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Diseño de Circuito Electrónico y test iniciales de movimientos en actuadores de codo, brazo y muñeca | 8 Horas | 24 TS |
TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma.
| Sabado 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Ensamble Final de motores dactilares, Adecuación de espacio para circuito electrónico en la pieza estructural del brazo | 8 Horas | 24 TS |
TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma.
| Viernes 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Ensamble Final de mecanismos de Rotor de codo y Rotor de brazo. Distribución de cableado | 5 Horas | 15 TS |
TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma.
| Jueves 18 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Ensamble de dedos y mecanismos, modificación electrónica de servo-motores | 5 Horas | 15 TS |
TODO:Diseñar las tapas para el área de los actuadores lineales, muñeca y palma.
| Miercoles 17 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Ensamble de Mecanismo de Rotación de Muñeca con servos lineales | 5 Horas | 15 TS |
TODO:Ensamblar las falanges de los dedos y sus Actuadores
Diseñar puntos de anclaje para los actuadores lineales en la muñeca.
Diseñar las tapas para el área de los actuadores lineales, muñeca y palma.
| Lunes 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Limpieza de Modelos Impresos, Ensamble de Motor de Rotación de Brazo | 5 Horas | 15 TS |
TODO:Imprimir Piezas Faltantes del mecanismo de rotación de muñeca.
Diseñar puntos de anclaje para los actuadores lineales en la muñeca.
Diseñar las tapas para el área de los actuadores lineales, muñeca y palma.
| Miercoles 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Modelado de Sistema de Rotula para rotación de muñeca | 5 Horas | 15 TS |
| Martes 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Adecuación de espacio para Tarjeta Controladora | 5 Horas | 15 TS |
| Lunes 8 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Modelado de Sistema de Rotula para rotación de muñeca | 5 Horas | 15 TS |
| Domingo 7 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Modelado de Soporte para Motores Lineales | 5 Horas | 15 TS |
| Sabado 6 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Modelado de Piezas Estructurales del brazo | 5 Horas | 15 TS |
| Viernes 5 | Descripción | Tiempo | TS |
|---|---|---|---|
| Johan Garcia | Impresión y acabados | 5 Horas | 15 TS |
| Jueves 4 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Se hizo el modelo del soporte de motor para pulgar, fue enviado a impresión 3D | 5 Horas | 15 TS |
| Miercoles 3 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Se terminó el modelo de la palma de la mano derecha con sus modelos accesorios y se enviaron a impresión | 10 Horas | 30 TS |
TODO: -Modelar la pieza estructural del brazo de acuerdo a las medidas de los actuadores y las medidas del beneficiario.
| Martes 2 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Se continuó la Impresión 3D de las falanges de los dedos de la mano derecha, Se modificaron los modelos de la palma para la nueva configuración de motores | 15 Horas | 45 TS |
| Jully Homez | Diseño 3D de motor de codo para montaje en software 3D | 4 Horas | 12 TS |
TODO: -Modelar la pieza estructural del brazo de acuerdo a las medidas de los actuadores y las medidas del beneficiario.
| Lunes 1 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Se inició la Impresión 3D de las falanges de los dedos de la mano derecha, Se continuó con el analisis del mecanismo de rotación de muñeca. | 15 Horas | 45 TS |
TODO: -Modelar la pieza estructural del brazo de acuerdo a las medidas de los actuadores y las medidas del beneficiario.
-Modelar el motor del codo para simulación del ensamble en software 3D.
Febrero 2021
| Domingo 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Modelado 3D de dedos y palma | 8 Horas | 24 TS |
TODO: -Iniciar el diseño de la mano para impresión de los dedos el dia Lunes 1ro de Marzo 2021
-Modelar el motor del codo para simulación del ensamble en software 3D
| Sabado 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| Johan García | Asistencia psicologica, temas legales, toma de medidas | 2 Horas | 6 TS |
| Fabián Bustos | Asesoría en diseño, mecánica y electrónica | 2 Horas | 6 TS |
| Andres Camilo Sanchez | Asistencia a entrevista para planeación del desarrollo de la prótesis | 2 Horas | 6 TS |
| Viernes 26 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabián Bustos | Analisis de datos, mecanismos y medidas | 6 Horas | 18 TS |
TODO: -Iniciar el diseño de la mano para impresión de los dedos el dia Lunes 1ro de Marzo 2021
-Modelar el motor del codo para simulación del ensamble en software 3D
Noviembre 2020
Semana del 17 al 20 de Noviembre
| Miércoles 18 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastian R. | Entrega presencial del montaje eléctrico, se realizaron las pruebas pertinentes de los sensores y actuadores y se concluye el trabajo. | 2 Horas | 6 TS |
| Salomé Pérez | Entrega presencial del montaje eléctrico, se realizaron las pruebas pertinentes de los sensores y actuadores y se concluye el trabajo. | 2 Horas | 6 TS |
| Martes 17 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastian R. | Se tomaron todos los componentes que hacen parte del circuito para probarlo de forma independiente al montaje de la mano, tras realizar las nuevas conexiones se logra hacer funcionar de forma adecuada el montaje eléctrico. | 4 Horas | 12 TS |
| Salomé Pérez | Se tomaron todos los componentes que hacen parte del circuito para probarlo de forma independiente al montaje de la mano, tras realizar las nuevas conexiones se logra hacer funcionar de forma adecuada el montaje eléctrico. | 4 Horas | 12 TS |
Semana del 9 al 13 de Noviembre
| Viernes 13 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastian R. | Debido a los inconvenientes presentados en cuanto al diseño, se decide concluir la parte electrónica de la prótesis de forma que solo deba modificarse el diseño de la misma. | 4 Horas | 12 TS |
| Salomé Pérez | Debido a los inconvenientes presentados en cuanto al diseño, se decide concluir la parte electrónica de la prótesis de forma que solo deba modificarse el diseño de la misma. | 4 Horas | 12 TS |
| Jueves 12 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastian R. | Según lo acordado se plantea hacer uso de un diseño previamente sugerido ya que se adecua de mejor forma a las dimensiones de la prótesis, por lo que se inició el diseño de un nuevo antebrazo que tuviera el espacio para que la parte electrónica tuviera lugar. | 5 Horas | 15 TS |
| Salomé Pérez | Según lo acordado se plantea hacer uso de un diseño previamente sugerido ya que se adecua de mejor forma a las dimensiones de la prótesis, por lo que se inició el diseño de un nuevo antebrazo que tuviera el espacio para que la parte electrónica tuviera lugar. | 5 Horas | 15 TS |
| Miércoles 11 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastian R. | Trabajo presencial en la fundación para ensamblaje de la prótesis, se descubrieron algunos errores en las piezas diseñadas y se propone hacer uso de otras piezas que hacen parte de la mano. | 6 Horas | 18 TS |
| Salomé Pérez | Trabajo presencial en la fundación para ensamblaje de la prótesis, se descubrieron algunos errores en las piezas diseñadas y se propone hacer uso de otras piezas que hacen parte de la mano. | 6 Horas | 18 TS |
| Martes 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastian R. | Documentación | 6 Horas | 85 TS |
| Salomé Pérez | Se recogieron las piezas de la mano para ensamblar con el ninja flex, pues tocó abrir más huecos a los dedos para que el movimiento fuera tanto para cerrar la mano como para abrirla, se montó a cada dedo para poder realizar las pruebas en la fundación el 11 de noviembre | 7 Horas | 18 TS |
| Lunes 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastian R. | Documentación | 6 Horas | 18 TS |
| Salomé Pérez | Se subió la segunda parte de la documentación a la wiki, se realizó una reunión para determinar la entrega del proyecto y se organizó un espacio con el grupo para el Martes 10 de noviembre terminar el ensamblaje de la mano | 5 Horas | 15 TS |
Semana del 3 al 6 de Noviembre
| Viernes 6 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastian R. | Se probó utilizando compuertas logicas, efectivamente funciona pero no hay tanto espacio, por mas de que se ponga en váquela, se dejará la novedad para futuras innovaciones. | 5 Horas | 15 TS |
| Salomé Pérez | Se subió una parte de la documentación a la wiki y se organizó la información con tal de que quedara en orden de realización | 4 Horas | 12 TS |
| Jueves 5 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastian R. | Se probó utilizando un conmutador para conectar dos baterías en sería para generar los 10V que se necesitan, sin embargo, es complejo puesto que solo carga una de las dos celdas, no resulto viable | 4 Horas | 12TS |
| Miércoles 4 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastian R. | Se utilizó una batería auxiliar para cargar el dispositivo, sin embargo el motor del brazo sigue demandando mucha energía, es posible que no sea suficiente y se deban utilizar dos baterías. | 4 Horas | 12 TS |
| Salomé Pérez | Se trabajó en la documentación del proyecto, recopilación de las imágenes y organización de las fases en que se dió el desarrollo y diseño del socket | 5 Horas | 15 TS |
| Martes 3 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastian R. | Trabajamos en la fundación los temas de tratamiento de piezas y funcionamiento de ensamble de la prótesis completa. Se corrigieron errores de otra prótesis. | 6 Horas | 18 TS |
| Salomé Pérez | Se trabajó en la fundación haciendo el ensamble de los dedos, se abrieron huecos para insertar en ellos el ninja flex | 4 Horas | 12 TS |
Octubre 2020
Semana del 26 al 30 de octubre
| Viernes 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastian R. | Trabajamos en la fundación con la prótesis de otro paciente | 5 Horas | 15 TS |
| Salomé Pérez | Documentación de la sección de diseño de socket, se realizó una guía que incluyera el proceso de elaboración, toma de medidas, ajustes y acabados finales del socket y del liner para socket. | 5 Horas | 15 TS |
| Jueves 29 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastian R. | Se cambió el montaje eléctrico dado que el modulo de carga y descarga no esta cargando las baterías. | 5 Horas | 15 TS |
| Salomé Pérez | Recopilación de imágenes y redacción de la primera parte de documentación de la sección de diseño de socket. | 4 Horas | 12 TS |
| Miércoles 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastian R. | Se corrigió la programación puesto que el motor no gira con la velocidad deseada. El motor requiere de una alta cantidad de energía y resulta que no gira con la velocidad deseada porque no cuenta con la potencia energética. | 4 Horas | 12 TS |
| Salomé Pérez | Recopilación de la información acerca del proceso de toma de medidas, diseño y ajustes de los primeros modelos de socket para iniciar documentación en la wiki del proyecto. | 4 Horas | 12 TS |
| Martes 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastian R. | Se programó el dispositivo para invertir el sentido de giro del motor | 6 Horas | 18 TS |
| Salomé Pérez | Envío de diseños por separado para la impresión, confección de liner para socket, se realizaron 4 modelos de diferentes medidas para asegurar un modelo de liner apto para el beneficiario, esto realizado teniendo las medidas tomadas del brazo. | 4 Horas | 12 TS |
| Lunes 26 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastian R. | Las piezas quedaron sin las perforaciones para que las atraviese los materiales, para ello se volvieron a perforar. | 6 Horas | 18 TS |
| Salomé Pérez | Cotización y compra de tela 8001 para liner del socket, investigación de resistencias de calor para máquina termoformadora | 7 Horas | 21 TS |
Semana del 19 al 23 de octubre
| Viernes 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Investigación sobre materiales para la hoja de la termoformadora | 5 Horas | 15 TS |
| Sebastian R. | tratamiento mecánico sobre las piezas, se realizaron perforaciones para que ellas puedan moverse como se había planteado. | 5 Horas | 15 TS |
| Salomé Pérez | Búsqueda de elastano (tela) en textileras, verificación de las medidas tomadas del escáner de muñón con el socket diseñado | 7 Horas | 21 TS |
| Jueves 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Diseño de nuevo marco circular para la hoja en la maquina de vaciado | 4 horas | 12 TS |
| Sebastian R. | Recogí las piezas, tratamiento mecánico sobre las mismas. En esta ocasión quedaron sin los errores cometidos sobre la primer muestra de piezas impresas, sin embargo debemos de hacer los huecos sobre las mismas para que estas funcionen correctamente | 4 Horas | 12 TS |
| Salomé Pérez | Investigación material antideslizante para evitar que el liner se salga del socket, el cual puede ser látex líquido. Selección de un material para el liner, elastano material sintético que permite la transpiración y es de secado rápido, lo cual evita laceraciones e irritación en la piel | 6 Horas | 18 TS |
| Miércoles 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Diseño de la caja superior de la maquina en la que van las resistencias y soporte | 5 Horas | 15 TS |
| Sebastian R. | Dadas las dimensiones de las impresiones se esta investigando en nuevas alternativas para satisfacer las necesidades energéticas | 4 Horas | 12 TS |
| Salomé Pérez | Investigación de los diferentes materiales que pueden utilizarse para el liner del socket, precios y características que permiten la transpiración en el material, consulta de las resistencias de calor, circuito y conexión para la máquina de vaciado | 6 Horas | 18 TS |
| Martes 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Diseño de la caja de vaciado y marco de la hoja | 5 Horas | 15 TS |
| Sebastian R. | Se diseño un circuito con una batería auxiliar para soportar la cantidad de actuadores | 6 Horas | 18 TS |
| Salomé Pérez | Búsqueda de diferentes referencias de bombas de vacío y sobre el sistema eléctrico relacionado con el calentamiento del material. | 6 Horas | 18 TS |
| Lunes 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Investigación sobre la variables que influyen en la maquina de vaciado, sobre la presión y las etapas del proceso con relación a las etapas de construcción y sobre el sistema eléctrico | 6 Horas | 18 TS |
| Sebastian R. | Prueba con los motores sobre los dedos. Seguimos trabajando sobre la etapa de potencia pues las baterías funcionan pero se descargan muy rápido dada la cantidad de actuadores que tenemos | 6 Horas | 12 TS |
| Salomé Pérez | Investigación sobre los costos del liner para prótesis según el material del que están hechos, análisis del material: según la actividad que se tenga se puede elegir un material para el liner. | 6 Horas | 18 TS |
Semana del 13 al 16 de octubre
| Viernes 16 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Ajustes en orificios de los dedos para los hilos, finalización de base para servomotores y ajusten en orificio para unión entre mano y antebrazo | 5 Horas | 15 TS |
| Sebastian R. | Interacción mecánica de las piezas con los motores. Se debe de volver a imprimir las piezas que se habían impreso dados los errores que se han cometido dentro de la etapa de diseño, impresión y post tratamiento | 5 Horas | 15 TS |
| Salomé Pérez | Investigación sobre materiales que pueden ir en el interior del socket (en contacto con el brazo) y corrección de unos segmentos del socket que debían pulirse, investigación sobre el principio de funcionamiento de la máquina de vaciado | 6 Horas | 18 TS |
| Jueves 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | finalización de ajustes de la primera parte del antebrazo y ajuste de posición para servomotores | 4 Horas | 12 TS |
| Sebastian R. | Pulido de los encajes de los dedos | 5 Horas | 15 TS |
| Salomé Pérez | Seccionamiento del socket para imprimir partes más pequeñas y apertura de los orificios para insertar la banda que asegura el socket al brazo, investigación de los materiales que pueden ayudar a dar un mejor ajuste del socket al brazo | 6 Horas | 18 TS |
| Miércoles 14 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Ajustes en orificios de la palma de la mano y de orificios en la primera parte del antebrazo | 5 Horas | 15 TS |
| Sebastian R. | Unión mecánica delas piezas | 5 Horas | 15 TS |
| Salomé Pérez | Unión de las piezas del socket que van acopladas al antebrazo y apertura del orificio en el que encaja el motor, investigación sobre tipos de bombas de vacío (precios, características técnicas) | 5 Horas | 15 TS |
| Martes 13 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Finalización ajustes en los dedos para la unión de los mismos entre ellos y con la mano | 5 Horas | 15 TS |
| Sebastian R. | Tratamiento mecánico de las piezas | 5 Horas | 15 TS |
| Salomé Pérez | Ajustes de la cavidad del motor en el socket según el diseño del antebrazo | 5 Horas | 15 TS |
Semana del 5 al 9 de octubre
| Viernes 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Ajustes en la unión de las partes de los dedos y ajustes del motor antebrazo | 5 Horas | 15 TS |
| Sebastian R. | El circuito funciona pero por algún motivo no se mueve a una velocidad prudente para la aplicación | 5 Horas | 15 TS |
| Salomé Pérez | Ajustes del socket y empalme del motor con el antebrazo | 5 Horas | 15 TS |
| Jueves 8 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Finalización de modificaciones en el antebrazo para encaje de motor y ajustes para unión de dedos | 4 Horas | 12 TS |
| Sebastian R. | Se soldaron componentes y se conecto etapa de potencia | 4 Horas | 12 TS |
| Salomé Pérez | Revisión de los materiales, proceso y qué otros dispositivos que pueden ser usados en la máquina de vaciado | 4 Horas | 12 TS |
| Miércoles 7 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Modificaciones diseño de antebrazo para acomodar el motor que encaja entre el antebrazo y el socket | 5 Horas | 15 TS |
| Sebastian R. | Desplazamiento a la fundación para recoger piezas | 5 Horas | 15 TS |
| Salomé Pérez | Modificaciones al diseño para adaptar motor y unión con el antebrazo | 5 Horas | 15 TS |
| Martes 6 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Diseño de espacio para el servomotor en el antebrazo para el encaje con el socket | 5 Horas | 15 TS |
| Sebastian R. | Se desarrolla una etapa de potencia para el circuito | 6 Horas | 018 TS |
| Salomé Pérez | Reunión con Sebastián y Melissa para definir el nuevo compartimento del motor para el socket, ajustes al anterior diseño para adaptar el motor | 5 Horas | 15 TS |
| Lunes 5 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Revisión bibliográfica acerca de las variables que definen el prceso de la maquina de vaciado y una revisión acerca de las maquinas ya existentes en el mercado | 5 Horas | 15 TS |
| Sebastian R. | Se corrigió el sentido de giro del motor | 6 Horas | 018 TS |
| Salomé Pérez | Diseño de socket con ajustes y revisión del proceso de vaciado de distintas máquinas | 5 Horas | 15 TS |
Septiembre 2020
Semana del 28 de septiembre al 3 de octubre
| Viernes 2 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Finalización de diseño de tornillo de acople para mano y antebrazo, investigación de diseños de maquina de vaciado | 5 Horas | 15 TS |
| Sebastian R. | Se hicieron pedidos de piezas para añadir al circuito. Existen componentes electrónicos que deben ser medidos dentro de la practica para solicitar nuevas piezas concorde a lo que se ha diseñado y planeado | 5 Horas | 015 TS |
| Salomé Pérez | Cambios en la propuesta de socket para adaptar al largo del brazo | 5 Horas | 15 TS |
| Jueves 1 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Ajustes diseño de motor, diseño de acople de tornillo en mano y antebrazo | 4 Horas | 12 TS |
| Sebastian R. | Se diseño una red de carga y descargar a partir de un integrado que permite el flujo de cargas sin afectar el sistema | 4 Horas | 12 TS |
| Salomé Pérez | Ajustes al nuevo diseño de socket, se plantea una forma adaptar el largo del socket para complementar el largo del brazo | 5 Horas | 15 TS |
| Miércoles 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | diseño de motor que da el movimiento del brazo para luego hacer el engranaje a la medida exacta del motor y del eje de este | 5 Horas | 15 TS |
| Sebastian R. | Se diseño la red de carga del circuito | 4 Horas | 12 TS |
| Salomé Pérez | Diseño de la nueva propuesta de socket con los ajustes comentados e investigación de algunos diseños que complementan el diseño propuesto | 5 Horas | 15 TS |
| Martes 29 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | cambios y ajustes en el diseño del encaje para los servomotores en en el antebrazo sin embargo, falta definir cual es el tamaño de los servos, diseño engranaje de los dedos y reunión de definición de cambios | 5 Horas | 15 TS |
| Sebastian R. | Trabajo en esquemático para potencia del circuito | 6 Horas | 18 TS |
| Salomé Pérez | Diseño de las dos propuestas de socket y reunión con Johan y el equipo de trabajo para determinar el socket definitivo con los cambios comentados | 5 Horas | 15 TS |
| Lunes 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Encaje de servomotor en antebrazo, reunión con Sebastián y Salome para la definición del encaje del motor que tiene el movimiento del antebrazo y el socket, documentación | 6 Horas | 18 TS |
| Sebastian R. | Investigación ene energía y potencia | 6 Horas | 18 TS |
| Salomé Pérez | Reunión con Melissa y Sebastián para definir cómo sería el encaje del antebrazo con el socket y trabajo en las dos propuestas de socket planteadas | 6 Horas | 18 TS |
Semana del 21 al 26 de septiembre
| Viernes 25 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Finalización del antebrazo | 5 Horas | 15 TS |
| Sebastian R. | Diseño de fuente de energía portable | 5 Horas | 15 TS |
| Salomé Pérez | Diseño de socket: Moldeado y pulido del diseño. | 6 Horas | 18 TS |
| Jueves 24 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Diseño de antebrazo, adecuación a medidas del beneficiario y adecuación de las falanges de los dedos | 5 Horas | 15 TS |
| Sebastian R. | Diseño fase de potencia | 4 Horas | 12 TS |
| Salomé Pérez | Diseño de socket para el brazo derecho y ajustes del mismo | 6 Horas | 18 TS |
| Miercoles 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Nuevo diseño de la mano, adecuación para el sistema electrónico | 5 Horas | 15 TS |
| Sebastian R. | Diseño de distribución energética y fuente de alimentación. Se utilizaron baterías, sin embargo se descargaron rápidamente | 4 Horas | 12 TS |
| Salomé Pérez | Correcciones del diseño, al tomar el molde/socket no se podía separar del escanner tomado | 6 Horas | 18 TS |
| Martes 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Nuevo diseño de la mano, adecuación para el sistema electrónico | 5 Horas | 15 TS |
| Sebastian R. | Diseño de un sensor artesanal, experimento fallido por cuestiones de diseño | 6 Horas | 18 TS |
| Salomé Pérez | Correcciones del diseño, al tomar el molde/socket no se podía separar del escanner tomado | 6 Horas | 18 TS |
| Lunes 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Estudio de caso sobre las fallas en la impresión de la mano y estudio del nuevo diseño | 5 Horas | 15 TS |
| Sebastian R. | Diseño de la red de motores a usar | 6 Horas | 18 TS |
| Salomé Pérez | Diseño de socket, dimensionamiento de medidas en el programa | 6 Horas | 18 TS |
Semana del 14 al 18 de septiembre
| Viernes 18 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Diseño engranaje para servomotor de la mano y diseño antebrazo | 5 Horas | 15 TS |
| Sebastian R. | Se desarrollo el recorrido con el mismo sensor para ambos motores | 5 Horas | 15 TS |
| Salomé Pérez | Diseño de socket y corrección de imperfecciones en el escanner | 5 Horas | 15 TS |
| Jueves 17 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Diseño de antebrazo, ajuste del espacio para los servo motores del antebrazo | 4 Horas | 12 TS |
| Sebastian R. | Se realizó un on/off para el circuito completo con el fin de no gastar energía y aprovecharla | 4 Horas | 12 TS |
| Salomé Pérez | Documentación y diseño de socket en Rhinoceros y ajustes del escaneado | 5 Horas | 15 TS |
| Miércoles 16 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Corrección en el diseño en el momento de remover la marca de la tapa de la palma de la mano | 5 Horas | 15 TS |
| Sebastian R. | Finalmente se comprobó que el driver con el que venia la prótesis no se encuentra en buen estado, ademas, para mover el motor se necesita de una fuente de voltaje grande lo que genera mayor peso en el diseño de la prótesis ademas de un diseño mas robusto. Se esta buscando la forma de alternar entre eficiencia y peso utilizando los mismos componente. Ahora se proyecta utilizar baterías recargables en serie para mover el motor que hace parte del codo | 4 Horas | 12 TS |
| Salomé Pérez | Al hacer la reconstrucción en el programa skanect seguían quedando vacíos en aquellas partes que no fueron escaneadas correctamente, además de que quedaban secciones con irregularidades, por lo que se plantea hacer la reconstrucción en el programa Rhinoceros. | 6 Horas | 18 TS |
| Martes 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Investigación de diseños para la parte del brazo y encaje con el antebrazo, ajustes del diseño de antebrazo para el brazo | 5 Horas | 15 TS |
| Sebastian R. | Se encontró en la electrónica que el motor se puede mover sin embargo no presenta na alta velocidad pero si un gran toque. Para corroborar eso se utilizo un puente H integrado que corresponde a la referencia L293D | 6 Horas | 18 TS |
| Salomé Pérez | De acuerdo con el escanner realizado se inicia la reconstrucción de las partes que no fueron escaneadas completamente ya que quedaban vacios, se hace la reconstrucción de esas partes en el programa skanect | 6 Horas | 18 TS |
| Lunes 14 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Documentación, reunión con salome para la decisión del proyecto de la maquina de vaciado para socket, trabajo en el antebrazo | 6 Horas | 18 TS |
| Sebastian R. | El motor presentó de nuevo vibraciones pero en ningún momento presento un giro, para ello se opto por comprobar con otro motor si la programación estaba mal y resulta que el motor que se utilizó tampoco funcionaba | 6 Horas | 18 TS |
| Salomé Pérez | Reunión con Melissa para decidir entre el proyecto de máquina de inyección y la máquina de vaciado para socket, investigación y reunión con el beneficiario Andrés Camilo para toma del scanner y molde de yeso del muñón derecho | 12 Horas | 36 TS |
Semana 7 de 11 de septiembre
| Viernes 11 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Ultimos arreglos en el diseño de la mano y revisión bibliografica acerca de la maquina de inyección | 5 Horas | 15 TS |
| Sebastian R. | Se desoldó los cables del motor paso a paso y se cambio por uno nuevos. Ahora el motor vibra por lo que se asume que esta funcional; es cuestión de trabajar en el sentido de giro del motor | 5 Horas | 15 TS |
| Salomé Pérez | Documentación y revisión de estrategias para el proyecto de máquina de vaciado para socket | 5 Horas | 15 TS |
| Jueves 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Trabajo en palma de la mano | 4 Horas | 12 TS |
| Sebastian R. | Al utilizar la programación documentada por los compañeros anteriores se evidencio que hay un problema físico que debemos corregir. | 4 Horas | 12 TS |
| Salomé Pérez | Lectura del manual para impresión 3D y revisión de cómo usar el programa skanect | 5 Horas | 15 TS |
| Miércoles 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Documentación y mejora en diseño de la mano | 5 Horas | 15 TS |
| Sebastian R. | Cambio de cables y de programación sobre el motor paso a paso | 4 Horas | 12 TS |
| Salomé Pérez | Visualización del video de escaneado en 3d con skanect (introducción), Lectura de material: Manuales de buenas prácticas para impresión 3D, Revisión de material ARTISTA | 6 Horas | 18 TS |
| Martes 8 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Ajustes diseño antebrazo | 5 Horas | 15 TS |
| Sebastian R. | Cambio de driver para el motor | 6 Horas | 18 TS |
| Salomé Pérez | Investigación sobre tipos de prótesis y socket - Tipos de materiales que se utilizan | 5 Horas | 15 TS |
| Lunes 7 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Modificaciones de diseño de antebrazo | 5 Horas | 15 TS |
| Sebastian R. | Investigación de una nueva programación y edición de la misma | 6 Horas | 18 TS |
| Salomé Pérez | Inducción de la plataforma de Utopia Maker e investigación | 6 Horas | 18 TS |
Semana 31 de agosto 4 de septiembre
| Viernes 4 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Ajuste de diseño de antebrazo para encaje con la mano | 5 Horas | 15 TS |
| Sebastian R. | Se programo el motor paso a paso que se ubica en el codo del prototipo | 5 Horas | 15 TS |
| Jueves 3 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Finalización en el diseño de la mano, encaje de la palma con la base | 4 Horas | 12 TS |
| Sebastian R. | Se investigo en nuevas alternativas a piezo electricos para poder someterlos a diferentes superficies y fuerzas para evaluar cual aporta un mejor resultado de acuerdo al diseño planteado | 4 Horas | 12 TS |
| Miercoles 2 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Finalización diseño de la palma de la mano | 5 Horas | 15 TS |
| Sebastian R. | Se adquirió un motor nuevo por 15K COP, el motor fue sometido ante un nuevo programa y se obtuvieron resultados positivos pues logra evidenciar la fuerza, de forma binaria, que se le aplica al sensor. | 4 Horas | 12 TS |
| Martes 1 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Trabajo en el diseño de la mano en rhinoceros | 5 Horas | 15 TS |
| Sebastian R. | Efectivamente el programa que se utilizo mas la aplicación de una fuerza sobre el motor termino por deteriorarlo. Se procede a investigar nuevas alternativas a estos motores | 6 Horas | 18 TS |
| Lunes 31 | Descripción | Tiempo | TS |
|---|---|---|---|
| Melissa Villanueva | Trabajo en el diseño de la mano en tinkercad | 6 Horas | 18 TS |
| Sebastian R. | Se logró realizar un movimiento con el piezo electrico sobre el motor, sin embargo el programa no resulta estable | 6 Horas | 18 TS |