Difference between revisions of "Prótesis Javier"
J.Martinez (talk | contribs) (→Septiembre 2019) |
David Gil R. (talk | contribs) (→Marzo 2020) |
||
| (208 intermediate revisions by 9 users not shown) | |||
| Line 1: | Line 1: | ||
| − | [[category: | + | [[category:Ongoing projects]] |
== Jefe de proyecto == | == Jefe de proyecto == | ||
| − | [https://es.utopiamaker.com/m3duto/user:254677 Javier] | + | {| class="wikitable sortable collapsible" |
| − | == | + | ! Maker |
| − | + | ! Image | |
| + | ! Profile | ||
| + | |||
| + | |- | ||
| + | | [[https://es.utopiamaker.com/m3duto/user:254677 Javier Henao]] || | ||
| + | <gallery> | ||
| + | Javier Henao.jpg| | ||
| + | </gallery> | ||
| + | || | ||
| + | |||
| + | *[https://utopiamaker.com/m3duto/user:254677 English] | ||
| + | *[https://fr.utopiamaker.com/m3duto/user:254677 Francais] | ||
| + | *[https://es.utopiamaker.com/m3duto/user:254677 Español] | ||
| + | |} | ||
| + | |||
| + | == Presentación == | ||
| + | El proyecto "Prótesis Javier" consiste en el estudio del caso del Señor Javier Henao, para el diseño y fabricación de prótesis de sus miembros superiores. Él tiene 38 años de edad, vive en la ciudad de Montenegro - Quindio y sufrió un accidente de transito donde resultó afectado con la amputación de sus dos miembros superiores, amputación por debajo del hombro, la EPS a la que se encuentra afiliado le proporcionó prótesis ortopédicas las cuales resultaron poco funcionales para Él, por su peso y complejidad operacional. Luego de indagar varias opciones llegó a nuestra fundación, Materialización 3D, donde fue aceptado como beneficiario. Su petición consiste en tener prótesis que pueda manejar de una forma sencilla, que le permitan desempeñar tareas diarias básicas y desenvolverse en un trabajo u oficio. | ||
| + | |||
| + | === Objetivo === | ||
| + | Este proyecto es un proyecto de vida para Javier. Vamos a documentar aquí todos los modelos de prótesis que va a recibir a lo largo de su vida, tratando de tener para él siempre los mejores avances de la tecnología, para que el uso de la prótesis pueda ser cada vez más útil para él. | ||
| + | |||
== Recursos == | == Recursos == | ||
| + | * <sup>HUMANOS</sup> | ||
| + | La realización del proyecto de manera eficaz requiere inicialmente que se conozcan las opiniones de profesionales en las siguientes ramas: | ||
| + | |||
| + | * Psicólogo | ||
| + | * Fisioterapeuta | ||
| + | |||
| + | Ya con estas evaluaciones se procede al diseño y fabricación por parte de: | ||
| + | |||
| + | * 4 makers | ||
| + | |||
| + | * <sup>MATERIALES</sup> | ||
| + | |||
| + | * Impresora Bogohack comprada en 2014 | ||
| + | * Impresora fabricada por Jesus para M3D en 2019 | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Materiales | ||
| + | ! Cantidad | ||
| + | ! fecha | ||
| + | ! Costo | ||
| + | |||
| + | |||
| + | |- | ||
| + | | ESP32 || 1 || xxxxxxxxxxxxxxxxxxx || xxxxxxxxxx | ||
| + | |- | ||
| + | | Sensores de Fuerza || 3 || xxxxxxxxxxxxxxxxxxx || xxxxxxxxxx | ||
| + | |- | ||
| + | | Filamento PLA || Protolab || 2/08/19 || 50 000 | ||
| + | |- | ||
| + | | Motor Fotocopiadora|| 1 || xxxxxxxxxxxxxxxxxxx || xxxxxxxxxx | ||
| + | |- | ||
| + | | Motoreductor || 4 || xxxxxxxxxxxxxxxxxxx || xxxxxxxxxx | ||
| + | |- | ||
| + | | Driver L293 || 3 || xxxxxxxxxxxxxxxxxxx || xxxxxxxxxx | ||
| + | |- | ||
| + | | Trimmer|| 3 || xxxxxxxxxxxxxxxxxxx || xxxxxxxxxx | ||
| + | |- | ||
| + | | Baterias 12V - 2200mA || 1 || xxxxxxxxxxxxxxxxxxx || xxxxxxxxxx | ||
| + | |- | ||
| + | | Pulsador || 2 || xxxxxxxxxxxxxxxxxxx || xxxxxxxxxx | ||
| + | |- | ||
| + | | Filamento PP || Protolab || xxxxxxxxxxxxxxxxxxx || xxxxxxxxxx | ||
| + | |- | ||
| + | | Rodamientos || 2 || xxxxxxxxxxxxxxxxxxx || xxxxxxxxxx | ||
| + | |- | ||
| + | | Leds || 2 || xxxxxxxxxxxxxxxxxxx || xxxxxxxxxx | ||
| + | |- | ||
| + | | LM7805 || 1 || xxxxxxxxxxxxxxxxxxx || xxxxxxxxxx | ||
| + | |- | ||
| + | | Condensadores || 2 || xxxxxxxxxxxxxxxxxxx || xxxxxxxxxx | ||
| + | |- | ||
| + | | Resistencias || 5 || xxxxxxxxxxxxxxxxxxx || xxxxxxxxxx | ||
| + | |} | ||
== Diseño y planos == | == Diseño y planos == | ||
| Line 10: | Line 84: | ||
== Equipo == | == Equipo == | ||
| − | + | ||
| − | + | {| class="wikitable sortable collapsible" | |
| − | + | ! Maker | |
| + | ! Foto | ||
| + | |||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || [[File:br_564045_photo.jpg|150px|thumb]] | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Maker | ||
| + | ! Foto | ||
| + | |||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || [[File:J.Martinez.jpg|150px|thumb]] | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Maker | ||
| + | ! Foto | ||
| + | |||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:503233 Juan P.] || [[File:Br 503233 photo.jpg|thumb]] | ||
| + | |} | ||
== Etapas == | == Etapas == | ||
=== Evalución Antropométrica === | === Evalución Antropométrica === | ||
| − | + | El señor Javier presenta amputación de sus miembros superiores, se toman medidas de los muñones, incluyendo escaneo 3D para digitalizar la información y toma de fotografias para la respectiva documentación. Como el señor Javier tiene prótesis ortopédicas que fueron diseñadas a medida de sus muñones se evalúa la posibilidad de usar parte de ellas y comenzar el diseño a partir del codo, inicialmente el diseño contará con movimientos básicos como la flexión del codo y una mano flexible con movimiento de pinza. | |
| − | + | ||
| − | |||
<gallery> | <gallery> | ||
WhatsApp_Image_2019-08-21_at_11.53.01_AM.jpg|Vista lateral | WhatsApp_Image_2019-08-21_at_11.53.01_AM.jpg|Vista lateral | ||
WhatsApp Image 2019-08-21 at 11.55.18 AM.jpg|Vista lateral 2 | WhatsApp Image 2019-08-21 at 11.55.18 AM.jpg|Vista lateral 2 | ||
| + | WhatsApp Image 2019-08-21 at 11.54.26 AM.jpg|Vista Frontal muñon derecho | ||
| + | WhatsApp_Image_2019-08-21_at_11.51.56_AM.jpg|Vista Frontal muñon izq | ||
</gallery> | </gallery> | ||
| − | |||
| − | ==== | + | <gallery> |
| − | + | Protesis ortopedicas.jpg|Prótesis Ortopédicas | |
| − | + | Protesis_ortepedicas_(1).jpg|Prótesis ortopédicas | |
| + | |||
| + | </gallery> | ||
| + | |||
| + | === Referencias para Diseño de Extremidad === | ||
| + | |||
| + | De común acuerdo con el beneficiario se decidió usar los brazos de las prótesis ortopédicas que posee, que ya tienen la forma y medidas de los muñones, así las cosas, la fabricación de las extremidades es llevada a cabo desde la parte del codo en adelante; el diseño 3D se realizó en el software FUSION 360 utilizando como referencia los componentes de las prótesis ortopédicas, teniendo en cuenta las peticiones del beneficiario, así como los volúmenes que ocuparan cada uno de los componentes dentro de ella. | ||
| + | |||
| + | Primer diseño de codo para motor DAIICHI KASEI (1.47N-m:2.1rpm) fijado al codo, permitiendo la rotación del antebrazo al accionar el motor. | ||
| + | |||
| + | <gallery> | ||
| + | CodoA.jpg|Codo Completo | ||
| + | CodoA 1.jpg|Sección ajuste al eje del motor | ||
| + | CodoA 1 lateral.jpg|Vista Lateral | ||
| + | CodoA 2.jpg|Sección complementaria | ||
| + | </gallery> | ||
| + | |||
| + | <gallery> | ||
| + | Ensamble codo-motor(1).jpg|Ensamble codo-motor | ||
| + | Ensamble codo-motor (2).jpg|Ensamble codo-motor | ||
| + | Ensamble codo-motor (3).jpg|Ensamble codo-motor | ||
| + | Modelo prótesis con su codo .jpg|Modelo prótesis con su codo | ||
| + | Prótesis con su codo (2).jpg|Modelo prótesis con su codo | ||
| + | </gallery> | ||
| + | |||
| + | <gallery> | ||
| + | File:WhatsApp Image 2019-09-02 at 17.51.45.jpg| Parte interna de antebrazo | ||
| + | File:Motores.jpg|Motores | ||
| + | File:Motor.png|Diseño motor | ||
| + | </gallery> | ||
| + | |||
| + | TODO: análisis mecánico de la adaptación del socket para los brazos y de allí saldrán ideas para comenzar con el diseño | ||
| + | |||
| + | |||
| + | ===Diseño Funcional=== | ||
| + | En evaluación de las tareas que Javier desea realizar, las acciones y posiciones que se desean lograr, se considera la realización del diseño de un mecanismo el cual permite a la protesis realizar los movimientos de pronación y supinación, siendo necesario el uso de un motor más ubicado en la zona del antebrazo, es necesario ubicar de forma adecuada la ubicación del mecanismo y del motor. | ||
| + | |||
| + | Se plantea un mecanismo de engranes planetarios, uno interno fijo al motor y al antebrazo, el cual se encarga de trasmitir el movimiento a un piñon externo, efectuando así la rotación de la mano. Ubicamos esto en una zona posterior a la muñeca para evitar tener conflictos con el sistema actuador de los dedos de la mano. | ||
| + | |||
| + | Se crea también el soporte para el acople entre el motor del codo y el antebrazo, la base para soportar el arduino, un rodamieento el cual sostiene las piezas que intervienen en el moviemiento de pronación y supinación y las pestañas y detalles para el ajuste a la hora del ensamble. | ||
| + | <gallery> | ||
| + | Detalle r.png|Rodamiento Pronación Supinación | ||
| + | DetalleM.png|Acople Antebrazo a motor del codo | ||
| + | Detallemun.png|Detalle Piñon interno | ||
| + | DetalleCompleto.png|thumb|Detalle acople movimiento rotación | ||
| + | </gallery> | ||
| + | Se puede observar que se logro mantener la homogeneidad en la silueta externa del antebrazo. | ||
| + | |||
| + | Internamente se requiere un soporte para fijar las placas electronicas. | ||
| + | |||
| + | Las piezas obtenidas para el primer prototipo son las siguientes: | ||
| + | <gallery> | ||
| + | BrazoI.jpg|thumb|Antebrazo Impreso | ||
| + | Brazoii.jpg|thumb|Ensamble Junto al Codo | ||
| + | </gallery> | ||
| + | En detalle se puede ver el codo, el ensamble con el motor y la solución para brindar major robustes al punto de apoyo del tornilo, el cual une la protesis al socket. | ||
| + | <gallery> | ||
| + | Codouno.jpg|thumb|Ensamble Codo Lateral | ||
| + | Cododos.jpg|thumb|Ensamble Codo | ||
| + | Codotres.jpg|thumb|Detalle Codo | ||
| + | </gallery> | ||
| + | |||
| + | ====Muñeca==== | ||
| + | Encontramos un piñon interno el cual permite realizar los movimientos de pronación y supinación | ||
| + | Encapsula los tres motores que se encargan de la actuación de los dedos, y cuenta con tres rieles guia para las cremalleras. | ||
| + | Esta acoplada de forma rigida a la mano. | ||
| + | El acople "rodamiento" entre el antebrazo y la muñeca respndce de manera correcta, ajusta y desliza de forma adecuada. | ||
| + | |||
| + | En los ultimos avances se ha planteado que la muñeca y la mano se cotemplen por completo en una sola pieza para dar solución al punto de unión entre estas dos partes. | ||
| + | <gallery> | ||
| + | Manomuneca.jpg|thumb|Mano - Muñeca | ||
| + | </gallery> | ||
| + | |||
| + | ===Diseño Mecánico=== | ||
| + | ====Acople Mano-Muñeca==== | ||
| + | Se realizaron varias pruebas. realizando cortes y cambios de sección, diferentes tipos de ajuste, encajes ganchos clips, llegando así al fin con un ajuste armonico visualmente y logrando rigidez y un buen ajuste en la unión, utilizando tres herramientas, lograr una mezcla geometrica de las piezas para obtener un encaje, dos puntos de interferencia yfinalmente garantizar el ajuste con dos tornillos. | ||
| + | <gallery> | ||
| + | Inter-tornillo muñeca.png|Interferencia y tornillo (Wrist) | ||
| + | Inter-tornillo mano.png|Interferencia y tornillo (Hand) | ||
| + | </gallery> | ||
| + | ====Cremallera Suave==== | ||
| + | Esta se encarga de la flexión y extensión de los dedos, por medio de la actuación de un motoreductor convirtiendo su movimiento rotacional en lineal. Se realizó la prueba de impresión con diferentes materiales flexibles y el mejor resultado fue obtenido con el PP, el cual tiene propiedades flexibles y la suficiente rigidez para no deformarse con el movimiento repetitivo de flexión y extensión del dedo. El dedo pulgar y el dedo índice cada uno cuenta con una cremallera independiente, con su respectivo motor, mientras los otros tres dedos cuentan con solo una cremallera la cual se divide en tres para lograr la acción simultanea de estos. | ||
| + | El recorrido que requiere realizar la cremallera está alrededor de 2 y 3 centímetros. | ||
| + | La ubicación de estos tres motores se localiza en la zona de la muñeca y posterior a esta. | ||
| + | <gallery> | ||
| + | Motor Encoder print.png|Soporte Motor y Encoder [A] | ||
| + | Motor Encoder printB.png|Piñones y riel para transmisión cremallera | ||
| + | </gallery> | ||
| + | ====Mesa de pruebas==== | ||
| + | Primer prototipo | ||
| + | <gallery> | ||
| + | Mesaprueba.jpg|Mesa de Pruebas | ||
| + | Detallecrema.jpg|Detalle Cremallera | ||
| + | </gallery> | ||
| + | ====Accionamiento dedos 3-4-5==== | ||
| + | Se diseño un mecanismo de arrastre para que por medio del accionamiento de un solo motor se pueda lograr de forma secuencial el accionamiento de los dedos del medio(3), anular(4), y meñique(5), tanto la contracción como extención de los dedos. | ||
| + | <gallery> | ||
| + | X3Rack.png|Vista conjunto | ||
| + | Cremallleras45.png|Detalle Cremalleras 4 y 5 | ||
| + | Cremallera3.png|Vista superior Cajuela - Cremallera | ||
| + | </gallery> | ||
| + | |||
| + | |||
| + | ====Analisis FEA ==== | ||
| + | Con el uso de las herramientas de análisis de ingeniería de Fusion 360 se realizaron pruebas de carga estática en los puntos críticos de la prótesis los cuales son los apoyos y puntos de fijación. | ||
| + | |||
| + | Las propiedades del material configuradas para la realización de las simulaciones fueron las siguientes: | ||
| + | |||
| + | Material: PLA. | ||
| + | |||
| + | Densidad: 1.25 g/cm^{3}. | ||
| + | |||
| + | Modulo de Young: 3.5 GPa. | ||
| + | |||
| + | Limite elástico: 30 MPa. | ||
| + | |||
| + | Para conocer las cargas que recaen en cada apoyo se realizo un análisis estático de cuerpo libre, con esté, ayudar a generar una ecuación en función del ángulo del brazo con respecto al punto de apoyo en el codo, y así encontrar en que puntos toma el mayor valor las reacciones sobre los apoyos. | ||
| + | |||
| + | También se analizo el punto de fijación de la protesis, en el codo, donde se ubica el tornillo que permite el acople al socket de la protesis. | ||
| + | ====Modificaciones Muñeca y Case de Motores==== | ||
| + | Se opto por integrar la muñeca y el case que sostiene los motores en una sola pieza, invirtiendo la dirección en la que se ensambla la muñeca, paso de enfrentarse de forma horizontal a vertical, de la misma manera en que se ensambla el antebrazo. Así se garantiza la facilidad de ensamble de los diferentes componentes que se encuentran en esa zona, encargadas del accionamiento de los dedos de la mano. Se adecuaron unas rutas para el paso de los cables desde cada componente hacia el centro para ser orientados a la zona del antebrazo, donde se encuentran los drivers y la tarjeta Teensy. | ||
| + | |||
| + | ===Diseño Eléctrico=== | ||
| + | Contamos con dos etapas de control diferente, una por señales mioelectricas y otra por comandos de voz; las dos soportadas en un Arduino Mega, necesario debido a los requerimientos de procesamiento y memoria para el tratamiento de las señales auditivas. | ||
| + | Es necesario el uso de Drivers para los motores, uno para cada uno, esto para suministrar la potencia a cada uno de ellos, ya que el Arduino no suministra la potencia suficiente, este se encarga solo de enviar las señales de control (PWM) a cada motor. | ||
| + | |||
| + | ====Control Codo y Muñeca==== | ||
| + | Se decidio usar sensores de fuerza flexible para obtener la señal, el cual se comporta como una resistencia variable; Como driver se seleccionó el integrado L297 el cual permite controlar hasta 4 motores, la otra opción es el integrado L293 que permite manipular dos motores a la vez; Se contara también con dos luces indicadoras para la dirección de giro de los motores. Por medio del sensor es posible alternar el sentido de giro de los motores por medio de dos ligeras pulsaciones seguidas (Con valores entre 200-745) y para la activación del motor se requiere de una pulsación sostenida con un valor mayor a 750, esto activara el motor mientras el valor de lectura se igual o mayor, de lo contrario el motor se detendra. Por ultimo se cuenta con dos finales de carrera para evitar choques y daños sobre el motor y demás piezas, cuando estos lleguen a las posiciones limite. | ||
| + | <gallery> | ||
| + | Motor codo.jpg|thumb|Conexión Basica, sensor - motor - indicadores - arduino | ||
| + | Electi.jpg|thumb|Montaje Electronica | ||
| + | </gallery> | ||
| + | |||
| + | ====Sensor==== | ||
| + | Sensor de fuerza flexible FSR402, el día 20 de Diciembre, Javier asisitio para realizar pruebas con el sensor, ajustar la ubicación de estos dentro del socket para que Javier con los moviemientos que logra hacer con el muñon los pueda activar. | ||
| + | Para obtener la corecta lecrura del sensor, además de ajustar su sensibilidad es ncesario conectar una resistencia mayor a 10K Ohms a tierra. | ||
| + | <gallery> | ||
| + | Testsensor.jpg|thumb|Ubicación Sensores | ||
| + | JavierTest1.jpg|thumb|Javier Test | ||
| + | JAvierTest2.jpg|thumb|Javier Test II | ||
| + | </gallery> | ||
| + | |||
| + | ====Comandos de Voz==== | ||
| + | Se implemento un ANN del tipo MLP en el software Matlab la cual requiere un entrenamiento con una base de datos de audios iniciales. El objetivo es reconocer comandos de voz especificos del beneficiario, comandos cortos, esto con el fin de disminuir los recursos de procesamiento. Para este caso ya que el objetivo es realizar dos protesis, una para cada brazo, es necesario usar comandos diferentes para cada brazo, asignando los números del 1 al 5 para 5 comandos difernetes para la mano derecha, y las vocales (a,e,i,o,u) para cinco comando diferentes para la mano izquierda. | ||
| + | Inicialmente se estan realizando pruebas estableciendo una conexión entre el PC y el controlador, el objetivo es al final realizar este procesamiento sin la necediad de la conexión con el PC. | ||
| + | ====Modificaciones==== | ||
| + | Al relizar las pruebas con Javier con el primer prototipo se ve la necesidad de disminuir la longitud del antebrazo para lograr una mejor armonia acorde a su altura, lo cual requiere cambiar el controlador a usar. Es por esto que se decide ahora usar la placa ESP 32 la cual tiene dimensiones mucho más reducidas que el Arduino Mega, además con mayor capacidad de almacenamiento y procesamiento. Cuenta con la facilidad de que se puede usar el mismo IDE de Arduino para programar este controlador. | ||
| + | |||
| + | ====Prototipo Tarjeta de Control==== | ||
| + | En una placa perforada se adecuó la placa teensy 3.2 junto a los demás componentes y plugs necesarios para la conexión de todos los diferentes perifericos. Cuenta con una etapa de regulación de voltaje para suministrar exactamente 5V a la entrada de la placa y 12V a los drivers de los motores. | ||
| + | Permite el control de 5 motores, toma lectura de los 3 sensores de fuerza, 3 potenciometros de la mano y la señal de dos fiales de carrera. | ||
| + | <gallery> | ||
| + | Teensy1.jpg|thumb|Placa conectada | ||
| + | Teensy322.jpg|thumb|Vista en detalle | ||
| + | Diagrama Control Prot.png|thumb|Diagrama general conexión | ||
| + | </gallery> | ||
| + | |||
| + | ====Diseños PCBs==== | ||
| + | Se diseñaron las rutas y conexiones de los respectivos pines de cada elemento en dos placas diferentes, una donde se encuentra la nivelación de energía para el funcionamiento correcto de cada elemento y la placa Teensy 3.2; otra placa donde se encuentran los drivers y salidas para cada uno de los motores. | ||
| + | <gallery> | ||
| + | Pcbcentral.png|thumb|PCB Central | ||
| + | Pcbdrivers.png|thumb|PCB Drivers | ||
| + | </gallery> | ||
| + | |||
| + | En este caso agregamos dos puertos micro usb-B para la conexión de los 3 sensores de fuerza y los dos pulsadores que se encuentran en el codo, así se garantiza una correcta conexión de estos sensores tan fundamentales para el control de la prótesis, facilita también el ensamble de esta sección. | ||
| + | El diseño de estas nuevas placas requiere que se modifiquen las bases de estas dentro del antebrazo. | ||
| + | |||
| + | Con los resultados obtenidos con estas primeras placas fueron positivos, pero los plugs y cables utilizados para la conexión no fueron los adecuados, ya que no garantizaron el ajuste correcto de todos los cables. Además a esto, se investigo se encotró un nuevo procesador el cual aunque es un poco más grande tiene una mayor potencial que la placa teensy, brindando la posibilidad de mejorar aun más el softwaare de control, el gran plus de este procesador es que cuenta con modulo de wifi y claro mayor capacidad de procesamiento. | ||
| + | ===PCB V2.0=== | ||
| + | Ya con el nuevo procesador, se rediseño toda la PCB, orientado el trabajo a lograr un grupo de placas modulares, lo cual va disminuir el espacio total que estas ocupan, disminuye la cantidad de cables y conexiones extras y nos brinda una mayor estabilidad en la conexión entre placas. Además de esto se opto por mandar a elaborar las placas para lograr un mejor acabado y resultado de las placas. | ||
| + | ===Pruebas=== | ||
| + | |||
| + | ====Primer Prototipo==== | ||
| + | <gallery> | ||
| + | JavierTest1.jpg|thumb|Javier Test | ||
| + | </gallery> | ||
| + | En el primer prototipo se realizo la prueba del funcionaiento de los motores del codo y del antebrazo, posterior a la muñeca. Se realizo la priueba de ensamble y adaptación al socket de las protesis que usaba Javier antes. Se evidencia la necesidad de disminuir la longitud de partes como el antebrazo, mano y dedo, ya que la protesis llega hasta muy abajo, lo cual hace que no se vea muy armonico y acorde a la estatura de Javier. | ||
| + | |||
| + | ====Segundo Prototipo==== | ||
| + | |||
| + | <gallery> | ||
| + | Arm1.jpg|thumb|Proto2A | ||
| + | Arm2.jpg|thumb|Proto2B | ||
| + | Arm3.jpg|thumb|Proto2C | ||
| + | Arm4.jpg|thumb|Detail | ||
| + | </gallery> | ||
| + | |||
| + | Segunda impresión del antebrazo, se opto por otras posiciones para su impresión. Aunque se logro un ensamble y ajuste adecuado es preferible optar por imprimir el antebrazo en solo dos piezas y no en cuatro como se ha venido realizando, aunque la unión de la piezas con el cloruro de metileno ha dado buenos resultados, el realizar un sola impresión garantiza el factor de seguridad y se obtendria un mejor ajuste al momento de ensamblar. | ||
| + | |||
| + | ===Reportes Actividades=== | ||
| + | ==== Marzo 2020 ==== | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 26 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Corrección mano y dedos [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 24 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Actualización de Wiki y Ultimos detalles PCB V2.1 [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 23 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||detalles PBC V2.1 y pruebas dedos [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 19 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Diseño PCB V2.1 , Control Drivers [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 17 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Pruebas PCB V2.0 y refinamiento código control [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 15 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||envió a elaborar PCB V2 [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 12 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Dieseño PCB V2 , Drivers [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 10 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Dieseño PCB V2 , Mother Board [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 08 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Dieseño PCB V2 , mother board[[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 05 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Diseño nueva PCB V2, etapa supply energy[[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 03 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Evaluación actual del proyecto [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 01 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Introducción Carlos al proyecto [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | ==== Febrero 2020 ==== | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 26 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Pruebas PCB v1 [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 24 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Pruebas PCB v1 [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 22 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Conexión fuente energia, bateria [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 19 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Soldadura componentes pcb v1 [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 17 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Soldadura componetes pcb V1 [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 15 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Pruebas impresión dedos [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 12 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Pruebas impresión cremallera PET [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 10 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Pruebas impresión cremallera TPU [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 08 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Pruebas modificación cremalleras [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 05 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Pruebas impresión dedo pulgar [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 03 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Pruebas impresión dedo pulgar [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 01 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Pruebas modificación dedos [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | ==== Diciembre 2020 ==== | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 07 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Actualización Wiki, elaboración PCBs [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 03 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Impresión plugs [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 02 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Conexión Plugs Micro USB [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 01 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Elaboración PCBs [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | ==== Noviembre 2020 ==== | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 30 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Elaboración PCBs [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 20 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Modificación Case y Muñeca [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 19 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Correcciones PCB [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 16 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Compra materiales para PCB [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Sabado 14 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Modificación Piñones y Cremalleras [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 13 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Modificación Case - Muñeca [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 12 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Actualización Wiki [[Prótesis Javier]] || 1 hr || 3 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 11 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Modificación PCBs [[Prótesis Javier]] || 3 hr || 9 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 10 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Diseño e impresión Plugs [[Prótesis Javier]] || 5 hr || 15 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 9 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Modificación PCB Drivers[[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | ==== Octubre 2020 ==== | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 30 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Modificación Código main [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 29 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Diseño PCB Drivers[[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 27 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Diseño PCB Central [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 26 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Modificaciones Antebrazo[[Prótesis Javier]] || 3 hr || 9 TS | ||
| + | |} | ||
| + | |||
| + | ==== Septiembre 2020 ==== | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 30 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Actualización Wiki [[Prótesis Javier]] || 1 hr || 3 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Martes 29 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || modificación Antebrazo[[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| − | ==== | + | ! Jueves 23 |
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Correción fallas modelo antebrazo [[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Martes 22 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Análisis Fallas antebrazo [[Prótesis Javier]] || 3 hr || 9 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Lunes 21 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Actualización Wiki [[Prótesis Javier]] || 1 hr || 3 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Jueves 20 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Cambio de posición de dos plugs de la tarjeta[[Prótesis Javier]] || 3 hr || 9 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Viernes 11 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Ensamble y ajuste antebrazo, roscas tornillos [[Prótesis Javier]] || 5 hr || 15 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Jueves 10 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Unión piezaS ante brazo[[Prótesis Javier]] || 2 hr || 6 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Jueves 03 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Puilido piezas antebrazo [[Prótesis Javier]] || 5 hr || 15 TS | ||
| + | |} | ||
| + | |||
| + | ==== Agosto 2020 ==== | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Jueves 20 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Rediseño piñon - cremallera [[Prótesis Javier]] || 5 hr || 15 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Martes 18 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Cambio orientación plugs de conexión tarjeta y actualización antebrazo[[Prótesis Javier]] || 5 hr || 15 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Sabado 15 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Actualización script de control[[Prótesis Javier]] || 5 hr || 15 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Jueves 13 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Pruebas y calibración cremallera 3-4-5[[Prótesis Javier]] || 5 hr || 15 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Martes 11 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Actualización Wiki, verificación conexiones [[Prótesis Javier]] || 5 hr || 15 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Lunes 10 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Prueba de conexión correctas en la placa principal[[Prótesis Javier]] || 5 hr || 15 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Viernes 07 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Placa adicioal para potenciometros de mano [[Prótesis Javier]] || 5 hr || 15 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Miercoles 05 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Etapa de regulación de voltaje plugin's de conexión interna[[Prótesis Javier]] || 5 hr || 15 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Lunes 03 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Cambio plugin's de conexión interna[[Prótesis Javier]] || 5 hr || 15 TS | ||
| + | |} | ||
| + | |||
| + | ==== Julio 2020 ==== | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Viernes 31 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Reconfiguración Electronica,cambio distribución al interior de la protesis[[Prótesis Javier]] || 5 hr || 15 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Jueves 30 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Generación ensamble completo[[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Jueves 23 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Generación de planos y actualización de la wiki[[Prótesis Javier]] || 5 hr || 15 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Miercoles 22 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Generación de piezas finales[[Prótesis Javier]] || 5 hr || 15 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Martes 21 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Calibración sensores y trimmers || 2hr || 6 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Pruebas agarre tipo pinza, prueba con sensores || 2hr || 6 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Sabado 18 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Pruebas junta rotacional de la muñeca[[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Viernes 17 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Ensamble sistema de cremalleras suaves[[Prótesis Javier]] || 5 hr || 15 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Jueves 16 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Soldadura componentes electronicos[[Prótesis Javier]] || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Día | ||
| + | ! Nombre | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | Miercoles 15/07 ||[https://es.utopiamaker.com/m3duto/user:382172 Johan G] || Impresión de piezas ajustadas [[Prótesis Javier]] || 6 hr || 18 TS | ||
| + | |- | ||
| + | | Miercoles 15/07 ||[https://es.utopiamaker.com/m3duto/user:564045 David Gil] || Diseño y ajustes [[Prótesis Javier]] || 5 hr || 15 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 10 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:382172 Johan García] || Impresión de piezas y entrega para ensamble || 2 hr || 6 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 8 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:382172 Johan García] || Impresión de piezas || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 6 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:382172 Johan García] || Impresión de piezas y entrega para ensamble || 2 hr || 6 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Jueves 2 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Recoger mano impresa modificada || 30 min || 2 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 2 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:382172 Johan García] ||Entrega de piezas para ensable || 2 hr || 6 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 1 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:382172 Johan García] ||impresión mano modificada || 3 hr || 9 TS | ||
| + | |} | ||
| + | |||
| + | ==== Junio 2020 ==== | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Martes 30 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Edición dedos y manos || 3 hr || 9 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Lunes 29 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Prueba cremallera indice|| 3 hr || 9 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 26 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Pulido de piezas || 3 hr || 9 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 25 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:382172 Johan García] ||Entrega de piezas para ensable || 2 hr || 6 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Miercoles 24 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:382172 Johan García] ||Impresión mano || 2 hr || 6 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Martes 23 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:382172 Johan García] ||Impresión mano || 2 hr || 6 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 22 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Diseño ajuste mano-muñeca || 3 hr || 9 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Jueves 18 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:382172 Johan García] ||Impresión mano || 2 hr || 6 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Miercoles 17 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:382172 Johan García] ||Impresión mano || 2 hr || 6 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 16 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Diseño ajuste mano-muñeca || 3 hr || 9 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ==== Mayo 2020 ==== | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Jueves 28 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Cremalleras dedos 3-4-5 || 3 hr || 9 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Miercoles 27 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Rediseño ajuste de muñeca- mano || 3 hr || 9 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | |||
| + | ! Domingo 24 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Prueba piezas nuevas ajuste de muñeca- mano || 3 hr || 9 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 20 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:382172 Johan García] || Impresión piezas de prueba || 1 hr || 3 TS | ||
| + | |} | ||
| + | |||
| + | ==== Abril 2019 ==== | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 01 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Modificación Mano, ductos para las cremalleras|| 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | ==== Marzo 2019 ==== | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 24 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Modificación Mano, ductos para las cremalleras|| 4 hr || 12 TS | ||
| + | |} | ||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
! Martes 17 | ! Martes 17 | ||
| Line 36: | Line 1,121: | ||
! TS | ! TS | ||
|- | |- | ||
| − | | [https://es.utopiamaker.com/m3duto/user: | + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Busqueda información Placa Teensy 3.2|| 4 hr || 12 TS |
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 10 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Modificación a la muñeca, reorganización motores|| 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 03 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Reinicio actividades, investigación controlador que remplase al ArduinoMega|| 4 hr || 12 TS | ||
| + | |} | ||
| + | ==== Febrero 2019 ==== | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 18 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Diseño mesa prueba de fatiga para dedos y cremalleras|| 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 11 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Actualización Wiki y diseño mesa prueba de fatiga|| 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 05 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Conexión Reconocimiento de Voz (Matlab) con el Controlador (Arduino) para pruebas en mesa de fatiga|| 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | ==== Diciembre 2019 ==== | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 20 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Prueba prótesis con [https://es.utopiamaker.com/m3duto/user:254677 Javier] || 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:503233 Juan Diego] ||Prueba prótesis con [https://es.utopiamaker.com/m3duto/user:254677 Javier] || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 19 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Ensamble parcial de la prótesis|| 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:503233 Juan Diego] ||Ensamble parcial de la prótesis|| 4 hr || 12 TS | ||
|} | |} | ||
| − | [[ | + | {| class="wikitable sortable collapsible" |
| + | ! Miercoles 18 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Adecuación de piezas de la protesis|| 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:503233 Juan Diego] ||Adecuación de piezas de la protesis|| 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 17 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Programación del Arduino Mega, control codo y muñeca|| 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:503233 Juan Diego] ||Programación del Arduino Mega|| 4 hr || 12 TS | ||
| + | |} | ||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| Line 47: | Line 1,217: | ||
! TS | ! TS | ||
|- | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Impresión dedos y muñeca|| 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 13 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Pulido piezas, continuando con impresión|| 4 hr || 12 TS | ||
| + | |} | ||
| − | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Impresión | + | {| class="wikitable sortable collapsible" |
| + | ! Jueves 12 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Re impresión piezas codo y antebrazo|| 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 11 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Detalles codo y antebrazo previo a nueva imoresión|| 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 10 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Diseño control codo y muñeca, detalles|| 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 9 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:382172 Johan García] || Imprimir piezas ([[Prótesis Javier]])|| 2 hr || 6 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Accionamiento movimientos pronación y supinación|| 2 hr || 6 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Sabado 7 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Diseño control codo y muñeca, actualización Wiki|| 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:503233 Juan Diego] ||Diseño control codo || 2 hr || 6 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 6 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Diseño control codo y muñeca, prueba rodamiento muñeca, impresión dedo|| 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:503233 Juan Diego] ||Diseño control codo || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 5 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Impresión nuevas cremalleras, impresión mano escala adecuada|| 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 3 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Impresión muñeca, prueba de sensores|| 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 01 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Impresión muñeca, prueba de sensores|| 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | ==== Noviempre 2019 ==== | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! sabado 30 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Diseño Muñeca, ubicación motores para acionamiento de la mano|| 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 28 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Diseño Mano, adecuación parte interna para direcconamiento de las cremalleras, ajuste a muñeca|| 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 26 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Diseño Mano, escalado y adecuación parte interna para direcconamiento de las cremalleras|| 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 25 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] ||Diseño del circuito eléctrico para visualizar el estado de la batería || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 21 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Impresión piñones y cobertura de motores|| 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 20 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] ||Pruebas de señal con el arduino y el sensor muscular|| 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 19 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] ||Ajustes de diseño sobre los dedos a usar || 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David Gil R] ||Ajustes de diseño sobre los dedos a usar || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Sábado 16 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:937955 DIego Chacón] ||Diseño mecanismo de la mano || 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David Gil R] || Programación de motor || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 15 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] ||Diseño acople muñeca_mano || 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David Gil R] ||Impresión prueba dedo Indice|| 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 14 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] ||Diseño acople muñeca-mano, investigación de modelos de dedos || 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David Gil R] ||Modificación dedos|| 3 hr || 9 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 13 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] ||Diseño ajuste antebrazo y mano|| 3 hr || 9 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 7 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David Gil R] ||Selección modificación mano, acople|| 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miércoles 06 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] ||Acople mano|| 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 05 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Reconocimiento ajustes para impresión final del antebrazo, conexión motor codo, pruebas || 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] ||Reconocimiento ajustes para impresión final del antebrazo, conexión motor codo, pruebas|| 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 01 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Ajustes piezas del codo y antebrazo || 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] ||Ajustes piezas del codo y antebrazo|| 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | ==== Octubre 2019 ==== | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 31 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] ||Diseño del acople de la mano || 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Impresión mitad codo, ajustes piezas del antebrazo || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 30 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Diseño del acople de la mano || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 29 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Diseño de la mano || 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Impresión cuarta parte antebrazo || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Luenes 28 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Pruebas de señal con el arduino || 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Impresión tercera parte antebrazo || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 25 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Pruebas de cremallera flexible || 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Impresión segunda parte antebrazo || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 24 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Detalles pendientes antebrazo || 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Diseño de la mano. Pruebas de impresión cremallera flexible || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 23 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Impresión de la primera parte del antebrazo || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 22 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Diseño y prueba de materiales en las cremalleras flexibles TPU - PP - PLA || 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Pruebas de impresión cremallera flexible || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 21 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Diseño de cremallera flexible || 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Programación y pruebas del sensor muscular en el arduino|| 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Sábado 19 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:937955 DIego Ch.] ||simulación mecanismo || 2 hr || 6 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 18 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Diseño y prueba de impresión cremallera flexible TPU || 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Programación y pruebas del sensor muscular en el arduino|| 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 16 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Análisis del algoritmo que se usará para programar el arduino || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 15 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Análisis del algoritmo que se usará para programar el arduino || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Sabado 12 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Detalles Antebrazo, zonas y piezas de sujeción y ajuste || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 11 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] ||Diseño alterno del giro para el antebrazo || 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] ||Detalles Antebrazo, soporte arduino, apoyo motor codo || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 10 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] ||Diseño alterno del giro para el antebrazo || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 09 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Impresión de prueba para el giro del antebrazo, actualización de la wiki || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 08 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Impresión de prueba para el giro del antebrazo || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | Comentarios: Se debe elegir un diseño definitivo del diseño, teniendo en cuenta las preferencias del beneficiario según conferencia telefónica con Él. | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 04 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Diseño alterno del antebrazo para mantener la estética del mismo || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 03 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Impresión prueba de articulación para movimientos de pronación y supinación || 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Impresión prueba de articulación para movimientos de pronación y supinación || 5 hr || 15 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 02 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Diseño del antebrazo con movimientos de pronación y supinación || 4 hr || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 01 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Diseño articulación para movimientos de pronación y supinación || 4 hr || 12 TS | ||
|- | |- | ||
| − | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || | + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Diseño articulación para movimientos de pronación y supinación || 4 hr || 12 TS |
|} | |} | ||
| + | ==== Septiembre 2019 ==== | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 30 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Diseño e impresión de los engranes encargados de realizar los movimientos de pronación y supinación, prueba 2|| 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Diseño e impresión de los engranes encargados de realizar los movimientos de pronación y supinación, prueba 2|| 4 hr || 12 TS | ||
| + | |} | ||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| − | ! | + | ! Viernes 27 |
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Diseño de los engranes encargados de realizar los movimientos de pronación y supinación || 3 hr || 9 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Diseño de los engranes encargados de realizar los movimientos de pronación y supinación || 4 hr || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 26 | ||
! Descripción | ! Descripción | ||
! Tiempo | ! Tiempo | ||
! TS | ! TS | ||
|- | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Calculos para los engranes encargados de realizar los movimientos de pronación y supinación y diseño CAD || 3 hr || 9 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Diseño CAD de los engranajes para los movimientos de pronación y supinación || 4 hr || 12 TS | ||
| + | |} | ||
| − | | [https://es.utopiamaker.com/m3duto/user: | + | {| class="wikitable sortable collapsible" |
| + | ! Miercoles 25 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Actualización de la wiki protesis javier || 4 hr || 12 TS | ||
|} | |} | ||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| − | ! | + | ! Lunes 23 |
! Descripción | ! Descripción | ||
! Tiempo | ! Tiempo | ||
! TS | ! TS | ||
|- | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Modificaciones al antebrazo, división por secciones|| 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Actualización de la wiki protesis javier, Instrucciones al beneficiario para que pueda completar su perfil en la wiki y pueda consultar el avance de su proyecto en la misma|| 4 hr || 12 TS | ||
| + | |} | ||
| + | COMENTARIOS: Se busca que el antebrazo tenga la posibilidad de brindar los movimientos de supinación y pronación. | ||
| − | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || | + | {| class="wikitable sortable collapsible" |
| + | ! Sabado 21 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Ajustes al diseño del codo para correción de la ubicación del motor, y angulo articular|| 4 hr || 12 TS | ||
| + | |} | ||
| + | COMENTARIOS: Corregido el diseño del codo respecto al motor, para que a 0° y 90° sobresalgan 4 cms del motor para ajustar al antebrazo. Limite articular de 100°. | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 20 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
|- | |- | ||
| − | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Diseño | + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Diseño del acople entre el codo y el antebrazo. Actualización de la wiki protesis javier || 4 hr || 12 TS |
|} | |} | ||
| + | TODO: Según análisis mecánico se debe rediseñar el codo ya que el eje del motor no quedó centrado y al hacer el giro del antebrazo puede presentar problemas. | ||
| − | |||
| − | [ | + | {| class="wikitable sortable collapsible" |
| − | [ | + | ! Jueves 19 |
| − | + | ! Descripción | |
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Diseño del acople entre el codo y el antebrazo || 4 hr || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:997037 Sebastian] || Aporte ocasional de ideas para el diseño|| 2 hr || 6 TS | ||
| + | |} | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| − | ! | + | ! Miercoles 18 |
! Descripción | ! Descripción | ||
! Tiempo | ! Tiempo | ||
! TS | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Pruebas y análisis ensamble codo || 4 hr || 12 TS | ||
| + | |} | ||
| + | TODO: análisis mecánico para adaptar el antebrazo a la prótesis | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 17 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
|- | |- | ||
| − | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || | + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Ensamble del codo, pruebas y análisis || 4 hr || 12 TS |
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Impresión Codo y Actualización de Wiki || 4 hr || 12 | ||
|} | |} | ||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| − | ! | + | ! Lunes 16 |
! Descripción | ! Descripción | ||
! Tiempo | ! Tiempo | ||
! TS | ! TS | ||
|- | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Impresión Codo y Actualización de Wiki || 4 hr || 12 | ||
| + | |} | ||
| + | |||
| − | | [https://es.utopiamaker.com/m3duto/user: | + | {| class="wikitable sortable collapsible" |
| + | ! Sabado 14 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Impresión Codo || 2 hr || 6 TS | ||
|} | |} | ||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| − | ! | + | ! Viernes 13 |
! Descripción | ! Descripción | ||
! Tiempo | ! Tiempo | ||
! TS | ! TS | ||
|- | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:564045 David G.] || Diseño prueba codo y acople a antebrazo || 3 hr || 9 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Diseño prueba codo y acople a antebrazo || 3 hr || 9 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 12 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Diseño del codo de acuerdo al motor seleccionado || 4 hr || 12 TS | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Diseño del codo de acuerdo al motor seleccionado || 4 hr || 12 TS | ||
|} | |} | ||
| Line 143: | Line 1,859: | ||
|- | |- | ||
| [https://es.utopiamaker.com/m3duto/user:564045 DavidG] || Diseño y medidas || 1 hr || 3 TS | | [https://es.utopiamaker.com/m3duto/user:564045 DavidG] || Diseño y medidas || 1 hr || 3 TS | ||
| − | |||
| − | |||
|- | |- | ||
| [https://es.utopiamaker.com/m3duto/user:503233 Alguien]??? || Diseño y medidas || 1 hr || 3 TS | | [https://es.utopiamaker.com/m3duto/user:503233 Alguien]??? || Diseño y medidas || 1 hr || 3 TS | ||
| Line 153: | Line 1,867: | ||
[https://es.utopiamaker.com/m3duto/user:503233 Alguien] diseño preliminar de antebrazo junto con [https://es.utopiamaker.com/m3duto/user:564045 DavidG] | [https://es.utopiamaker.com/m3duto/user:503233 Alguien] diseño preliminar de antebrazo junto con [https://es.utopiamaker.com/m3duto/user:564045 DavidG] | ||
[https://es.utopiamaker.com/m3duto/535373 j.martinez] y [https://es.utopiamaker.com/m3duto/user:937955 DIego Chacón]. | [https://es.utopiamaker.com/m3duto/535373 j.martinez] y [https://es.utopiamaker.com/m3duto/user:937955 DIego Chacón]. | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
TODO: análisis mecánico de la adaptación del socket para los brazos y de allí saldrán ideas para comenzar con el diseño | TODO: análisis mecánico de la adaptación del socket para los brazos y de allí saldrán ideas para comenzar con el diseño | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 5 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] ||Estudio del diseño en el entorno Fushion 3 || 1 hr || 3 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 3 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] ||Estudio del diseño en el entorno Fushion 3 || 1 hr || 3 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 2 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 Jimmy M.] || Estudio del diseño en el entorno Fushion 3D || 1 hr || 3 TS | ||
| + | |} | ||
==== Agosto 2019 ==== | ==== Agosto 2019 ==== | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! viernes 30 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 j.martinez] || Familiarización con el programa de diseño Inventor Professional || 1 Hrs || 3 TS | ||
| + | |} | ||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| − | ! | + | ! Jueves 29 |
! Descripción | ! Descripción | ||
! Tiempo | ! Tiempo | ||
! TS | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 j.martinez] || Familiarización con el programa de diseño Inventor Professional || 1 Hrs || 3 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miércoles 28 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
|- | |- | ||
| − | | [https://es.utopiamaker.com/m3duto/user:535373 j.martinez] || | + | | [https://es.utopiamaker.com/m3duto/user:535373 j.martinez] || Familiarización con el programa de diseño Inventor Professional || 1 Hrs || 3 TS |
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 27 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
|- | |- | ||
| − | | [https://es.utopiamaker.com/m3duto/user: | + | | [https://es.utopiamaker.com/m3duto/user:535373 j.martinez] || Familiarización con el programa de diseño Inventor Professional || 1 Hrs || 3 TS |
|} | |} | ||
| − | + | {| class="wikitable sortable collapsible" | |
| + | ! lunes 26 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 j.martinez] || Familiarización con el programa de diseño Inventor Professional || 4 Hrs || 3 TS | ||
| + | |} | ||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| − | ! | + | ! viernes 23 |
! Descripción | ! Descripción | ||
! Tiempo | ! Tiempo | ||
! TS | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:535373 j.martinez] || Ya que el beneficiario del proyecto optó por dejar las prótesis que la EPS le dió, se procedió a desarmarlas para su estudio y aprovechamiento || 2Hrs || 6 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! jueves 22 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
|- | |- | ||
| − | | [https://es.utopiamaker.com/m3duto/user:535373 j.martinez] || Toma de medidas y fotografías de los muñones de las extremidades superiores incluyendo el escaneo 3D para digitalizar la información || | + | | [https://es.utopiamaker.com/m3duto/user:535373 j.martinez] || Toma de medidas y fotografías de los muñones de las extremidades superiores incluyendo el escaneo 3D para digitalizar la información || 1Hr || 3 TS |
|- | |- | ||
| − | | [https://es.utopiamaker.com/m3duto/user: | + | | [https://es.utopiamaker.com/m3duto/user:703245 Camilo Upegui] || Ayuda con la toma de medidas y fotografías de las prótesis antiguas || 1Hr || 3 TS |
|} | |} | ||
| − | |||
| − | |||
Latest revision as of 00:42, 27 March 2021
Contents
- 1 Jefe de proyecto
- 2 Presentación
- 3 Recursos
- 4 Diseño y planos
- 5 Equipo
- 6 Etapas
- 6.1 Evalución Antropométrica
- 6.2 Referencias para Diseño de Extremidad
- 6.3 Diseño Funcional
- 6.4 Diseño Mecánico
- 6.5 Diseño Eléctrico
- 6.6 PCB V2.0
- 6.7 Pruebas
- 6.8 Reportes Actividades
- 6.8.1 Marzo 2020
- 6.8.2 Febrero 2020
- 6.8.3 Diciembre 2020
- 6.8.4 Noviembre 2020
- 6.8.5 Octubre 2020
- 6.8.6 Septiembre 2020
- 6.8.7 Agosto 2020
- 6.8.8 Julio 2020
- 6.8.9 Junio 2020
- 6.8.10 Mayo 2020
- 6.8.11 Abril 2019
- 6.8.12 Marzo 2019
- 6.8.13 Febrero 2019
- 6.8.14 Diciembre 2019
- 6.8.15 Noviempre 2019
- 6.8.16 Octubre 2019
- 6.8.17 Septiembre 2019
- 6.8.18 Agosto 2019
Jefe de proyecto
| Maker | Image | Profile |
|---|---|---|
| [Javier Henao] |
|

Presentación
El proyecto "Prótesis Javier" consiste en el estudio del caso del Señor Javier Henao, para el diseño y fabricación de prótesis de sus miembros superiores. Él tiene 38 años de edad, vive en la ciudad de Montenegro - Quindio y sufrió un accidente de transito donde resultó afectado con la amputación de sus dos miembros superiores, amputación por debajo del hombro, la EPS a la que se encuentra afiliado le proporcionó prótesis ortopédicas las cuales resultaron poco funcionales para Él, por su peso y complejidad operacional. Luego de indagar varias opciones llegó a nuestra fundación, Materialización 3D, donde fue aceptado como beneficiario. Su petición consiste en tener prótesis que pueda manejar de una forma sencilla, que le permitan desempeñar tareas diarias básicas y desenvolverse en un trabajo u oficio.
Objetivo
Este proyecto es un proyecto de vida para Javier. Vamos a documentar aquí todos los modelos de prótesis que va a recibir a lo largo de su vida, tratando de tener para él siempre los mejores avances de la tecnología, para que el uso de la prótesis pueda ser cada vez más útil para él.
Recursos
* HUMANOS
La realización del proyecto de manera eficaz requiere inicialmente que se conozcan las opiniones de profesionales en las siguientes ramas:
- Psicólogo
- Fisioterapeuta
Ya con estas evaluaciones se procede al diseño y fabricación por parte de:
- 4 makers
* MATERIALES
- Impresora Bogohack comprada en 2014
- Impresora fabricada por Jesus para M3D en 2019
| Materiales | Cantidad | fecha | Costo
|
|---|---|---|---|
| ESP32 | 1 | xxxxxxxxxxxxxxxxxxx | xxxxxxxxxx |
| Sensores de Fuerza | 3 | xxxxxxxxxxxxxxxxxxx | xxxxxxxxxx |
| Filamento PLA | Protolab | 2/08/19 | 50 000 |
| Motor Fotocopiadora | 1 | xxxxxxxxxxxxxxxxxxx | xxxxxxxxxx |
| Motoreductor | 4 | xxxxxxxxxxxxxxxxxxx | xxxxxxxxxx |
| Driver L293 | 3 | xxxxxxxxxxxxxxxxxxx | xxxxxxxxxx |
| Trimmer | 3 | xxxxxxxxxxxxxxxxxxx | xxxxxxxxxx |
| Baterias 12V - 2200mA | 1 | xxxxxxxxxxxxxxxxxxx | xxxxxxxxxx |
| Pulsador | 2 | xxxxxxxxxxxxxxxxxxx | xxxxxxxxxx |
| Filamento PP | Protolab | xxxxxxxxxxxxxxxxxxx | xxxxxxxxxx |
| Rodamientos | 2 | xxxxxxxxxxxxxxxxxxx | xxxxxxxxxx |
| Leds | 2 | xxxxxxxxxxxxxxxxxxx | xxxxxxxxxx |
| LM7805 | 1 | xxxxxxxxxxxxxxxxxxx | xxxxxxxxxx |
| Condensadores | 2 | xxxxxxxxxxxxxxxxxxx | xxxxxxxxxx |
| Resistencias | 5 | xxxxxxxxxxxxxxxxxxx | xxxxxxxxxx |
Diseño y planos
- Link Diseño: https://www.thingiverse.com/thing:3836101
Equipo
| Maker | Foto |
|---|---|
| David G. |

| Maker | Foto |
|---|---|
| Jimmy M. |

| Maker | Foto |
|---|---|
| Juan P. |

Etapas
Evalución Antropométrica
El señor Javier presenta amputación de sus miembros superiores, se toman medidas de los muñones, incluyendo escaneo 3D para digitalizar la información y toma de fotografias para la respectiva documentación. Como el señor Javier tiene prótesis ortopédicas que fueron diseñadas a medida de sus muñones se evalúa la posibilidad de usar parte de ellas y comenzar el diseño a partir del codo, inicialmente el diseño contará con movimientos básicos como la flexión del codo y una mano flexible con movimiento de pinza.

Vista lateral

Vista lateral 2

Vista Frontal muñon derecho

Vista Frontal muñon izq





Prótesis Ortopédicas

Prótesis ortopédicas

.jpg)
Referencias para Diseño de Extremidad
De común acuerdo con el beneficiario se decidió usar los brazos de las prótesis ortopédicas que posee, que ya tienen la forma y medidas de los muñones, así las cosas, la fabricación de las extremidades es llevada a cabo desde la parte del codo en adelante; el diseño 3D se realizó en el software FUSION 360 utilizando como referencia los componentes de las prótesis ortopédicas, teniendo en cuenta las peticiones del beneficiario, así como los volúmenes que ocuparan cada uno de los componentes dentro de ella.
Primer diseño de codo para motor DAIICHI KASEI (1.47N-m:2.1rpm) fijado al codo, permitiendo la rotación del antebrazo al accionar el motor.

Codo Completo

Sección ajuste al eje del motor

Vista Lateral

Sección complementaria





Ensamble codo-motor

Ensamble codo-motor

Ensamble codo-motor

Modelo prótesis con su codo

Modelo prótesis con su codo
.jpg)
.jpg)
.jpg)

.jpg)

Parte interna de antebrazo

Motores
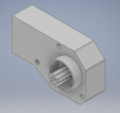
Diseño motor


TODO: análisis mecánico de la adaptación del socket para los brazos y de allí saldrán ideas para comenzar con el diseño
Diseño Funcional
En evaluación de las tareas que Javier desea realizar, las acciones y posiciones que se desean lograr, se considera la realización del diseño de un mecanismo el cual permite a la protesis realizar los movimientos de pronación y supinación, siendo necesario el uso de un motor más ubicado en la zona del antebrazo, es necesario ubicar de forma adecuada la ubicación del mecanismo y del motor.
Se plantea un mecanismo de engranes planetarios, uno interno fijo al motor y al antebrazo, el cual se encarga de trasmitir el movimiento a un piñon externo, efectuando así la rotación de la mano. Ubicamos esto en una zona posterior a la muñeca para evitar tener conflictos con el sistema actuador de los dedos de la mano.
Se crea también el soporte para el acople entre el motor del codo y el antebrazo, la base para soportar el arduino, un rodamieento el cual sostiene las piezas que intervienen en el moviemiento de pronación y supinación y las pestañas y detalles para el ajuste a la hora del ensamble.

Rodamiento Pronación Supinación
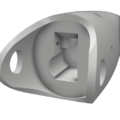
Acople Antebrazo a motor del codo
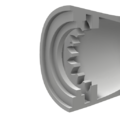
Detalle Piñon interno
Detalle acople movimiento rotación



Se puede observar que se logro mantener la homogeneidad en la silueta externa del antebrazo.
Internamente se requiere un soporte para fijar las placas electronicas.
Las piezas obtenidas para el primer prototipo son las siguientes:

Antebrazo Impreso

Ensamble Junto al Codo


En detalle se puede ver el codo, el ensamble con el motor y la solución para brindar major robustes al punto de apoyo del tornilo, el cual une la protesis al socket.

Ensamble Codo Lateral

Ensamble Codo

Detalle Codo



Muñeca
Encontramos un piñon interno el cual permite realizar los movimientos de pronación y supinación Encapsula los tres motores que se encargan de la actuación de los dedos, y cuenta con tres rieles guia para las cremalleras. Esta acoplada de forma rigida a la mano. El acople "rodamiento" entre el antebrazo y la muñeca respndce de manera correcta, ajusta y desliza de forma adecuada.
En los ultimos avances se ha planteado que la muñeca y la mano se cotemplen por completo en una sola pieza para dar solución al punto de unión entre estas dos partes.

Mano - Muñeca

Diseño Mecánico
Acople Mano-Muñeca
Se realizaron varias pruebas. realizando cortes y cambios de sección, diferentes tipos de ajuste, encajes ganchos clips, llegando así al fin con un ajuste armonico visualmente y logrando rigidez y un buen ajuste en la unión, utilizando tres herramientas, lograr una mezcla geometrica de las piezas para obtener un encaje, dos puntos de interferencia yfinalmente garantizar el ajuste con dos tornillos.
Interferencia y tornillo (Wrist)

Interferencia y tornillo (Hand)


Cremallera Suave
Esta se encarga de la flexión y extensión de los dedos, por medio de la actuación de un motoreductor convirtiendo su movimiento rotacional en lineal. Se realizó la prueba de impresión con diferentes materiales flexibles y el mejor resultado fue obtenido con el PP, el cual tiene propiedades flexibles y la suficiente rigidez para no deformarse con el movimiento repetitivo de flexión y extensión del dedo. El dedo pulgar y el dedo índice cada uno cuenta con una cremallera independiente, con su respectivo motor, mientras los otros tres dedos cuentan con solo una cremallera la cual se divide en tres para lograr la acción simultanea de estos. El recorrido que requiere realizar la cremallera está alrededor de 2 y 3 centímetros. La ubicación de estos tres motores se localiza en la zona de la muñeca y posterior a esta.
Soporte Motor y Encoder [A]
Piñones y riel para transmisión cremallera


Mesa de pruebas
Primer prototipo

Mesa de Pruebas

Detalle Cremallera


Accionamiento dedos 3-4-5
Se diseño un mecanismo de arrastre para que por medio del accionamiento de un solo motor se pueda lograr de forma secuencial el accionamiento de los dedos del medio(3), anular(4), y meñique(5), tanto la contracción como extención de los dedos.
Vista conjunto
Detalle Cremalleras 4 y 5
Vista superior Cajuela - Cremallera



Analisis FEA
Con el uso de las herramientas de análisis de ingeniería de Fusion 360 se realizaron pruebas de carga estática en los puntos críticos de la prótesis los cuales son los apoyos y puntos de fijación.
Las propiedades del material configuradas para la realización de las simulaciones fueron las siguientes:
Material: PLA.
Densidad: 1.25 g/cm^{3}.
Modulo de Young: 3.5 GPa.
Limite elástico: 30 MPa.
Para conocer las cargas que recaen en cada apoyo se realizo un análisis estático de cuerpo libre, con esté, ayudar a generar una ecuación en función del ángulo del brazo con respecto al punto de apoyo en el codo, y así encontrar en que puntos toma el mayor valor las reacciones sobre los apoyos.
También se analizo el punto de fijación de la protesis, en el codo, donde se ubica el tornillo que permite el acople al socket de la protesis.
Modificaciones Muñeca y Case de Motores
Se opto por integrar la muñeca y el case que sostiene los motores en una sola pieza, invirtiendo la dirección en la que se ensambla la muñeca, paso de enfrentarse de forma horizontal a vertical, de la misma manera en que se ensambla el antebrazo. Así se garantiza la facilidad de ensamble de los diferentes componentes que se encuentran en esa zona, encargadas del accionamiento de los dedos de la mano. Se adecuaron unas rutas para el paso de los cables desde cada componente hacia el centro para ser orientados a la zona del antebrazo, donde se encuentran los drivers y la tarjeta Teensy.
Diseño Eléctrico
Contamos con dos etapas de control diferente, una por señales mioelectricas y otra por comandos de voz; las dos soportadas en un Arduino Mega, necesario debido a los requerimientos de procesamiento y memoria para el tratamiento de las señales auditivas. Es necesario el uso de Drivers para los motores, uno para cada uno, esto para suministrar la potencia a cada uno de ellos, ya que el Arduino no suministra la potencia suficiente, este se encarga solo de enviar las señales de control (PWM) a cada motor.
Control Codo y Muñeca
Se decidio usar sensores de fuerza flexible para obtener la señal, el cual se comporta como una resistencia variable; Como driver se seleccionó el integrado L297 el cual permite controlar hasta 4 motores, la otra opción es el integrado L293 que permite manipular dos motores a la vez; Se contara también con dos luces indicadoras para la dirección de giro de los motores. Por medio del sensor es posible alternar el sentido de giro de los motores por medio de dos ligeras pulsaciones seguidas (Con valores entre 200-745) y para la activación del motor se requiere de una pulsación sostenida con un valor mayor a 750, esto activara el motor mientras el valor de lectura se igual o mayor, de lo contrario el motor se detendra. Por ultimo se cuenta con dos finales de carrera para evitar choques y daños sobre el motor y demás piezas, cuando estos lleguen a las posiciones limite.

Conexión Basica, sensor - motor - indicadores - arduino

Montaje Electronica


Sensor
Sensor de fuerza flexible FSR402, el día 20 de Diciembre, Javier asisitio para realizar pruebas con el sensor, ajustar la ubicación de estos dentro del socket para que Javier con los moviemientos que logra hacer con el muñon los pueda activar. Para obtener la corecta lecrura del sensor, además de ajustar su sensibilidad es ncesario conectar una resistencia mayor a 10K Ohms a tierra.

Ubicación Sensores

Javier Test

Javier Test II



Comandos de Voz
Se implemento un ANN del tipo MLP en el software Matlab la cual requiere un entrenamiento con una base de datos de audios iniciales. El objetivo es reconocer comandos de voz especificos del beneficiario, comandos cortos, esto con el fin de disminuir los recursos de procesamiento. Para este caso ya que el objetivo es realizar dos protesis, una para cada brazo, es necesario usar comandos diferentes para cada brazo, asignando los números del 1 al 5 para 5 comandos difernetes para la mano derecha, y las vocales (a,e,i,o,u) para cinco comando diferentes para la mano izquierda. Inicialmente se estan realizando pruebas estableciendo una conexión entre el PC y el controlador, el objetivo es al final realizar este procesamiento sin la necediad de la conexión con el PC.
Modificaciones
Al relizar las pruebas con Javier con el primer prototipo se ve la necesidad de disminuir la longitud del antebrazo para lograr una mejor armonia acorde a su altura, lo cual requiere cambiar el controlador a usar. Es por esto que se decide ahora usar la placa ESP 32 la cual tiene dimensiones mucho más reducidas que el Arduino Mega, además con mayor capacidad de almacenamiento y procesamiento. Cuenta con la facilidad de que se puede usar el mismo IDE de Arduino para programar este controlador.
Prototipo Tarjeta de Control
En una placa perforada se adecuó la placa teensy 3.2 junto a los demás componentes y plugs necesarios para la conexión de todos los diferentes perifericos. Cuenta con una etapa de regulación de voltaje para suministrar exactamente 5V a la entrada de la placa y 12V a los drivers de los motores. Permite el control de 5 motores, toma lectura de los 3 sensores de fuerza, 3 potenciometros de la mano y la señal de dos fiales de carrera.

Placa conectada

Vista en detalle
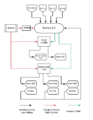
Diagrama general conexión



Diseños PCBs
Se diseñaron las rutas y conexiones de los respectivos pines de cada elemento en dos placas diferentes, una donde se encuentra la nivelación de energía para el funcionamiento correcto de cada elemento y la placa Teensy 3.2; otra placa donde se encuentran los drivers y salidas para cada uno de los motores.
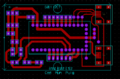
PCB Central
PCB Drivers


En este caso agregamos dos puertos micro usb-B para la conexión de los 3 sensores de fuerza y los dos pulsadores que se encuentran en el codo, así se garantiza una correcta conexión de estos sensores tan fundamentales para el control de la prótesis, facilita también el ensamble de esta sección. El diseño de estas nuevas placas requiere que se modifiquen las bases de estas dentro del antebrazo.
Con los resultados obtenidos con estas primeras placas fueron positivos, pero los plugs y cables utilizados para la conexión no fueron los adecuados, ya que no garantizaron el ajuste correcto de todos los cables. Además a esto, se investigo se encotró un nuevo procesador el cual aunque es un poco más grande tiene una mayor potencial que la placa teensy, brindando la posibilidad de mejorar aun más el softwaare de control, el gran plus de este procesador es que cuenta con modulo de wifi y claro mayor capacidad de procesamiento.
PCB V2.0
Ya con el nuevo procesador, se rediseño toda la PCB, orientado el trabajo a lograr un grupo de placas modulares, lo cual va disminuir el espacio total que estas ocupan, disminuye la cantidad de cables y conexiones extras y nos brinda una mayor estabilidad en la conexión entre placas. Además de esto se opto por mandar a elaborar las placas para lograr un mejor acabado y resultado de las placas.
Pruebas
Primer Prototipo
Javier Test
En el primer prototipo se realizo la prueba del funcionaiento de los motores del codo y del antebrazo, posterior a la muñeca. Se realizo la priueba de ensamble y adaptación al socket de las protesis que usaba Javier antes. Se evidencia la necesidad de disminuir la longitud de partes como el antebrazo, mano y dedo, ya que la protesis llega hasta muy abajo, lo cual hace que no se vea muy armonico y acorde a la estatura de Javier.
Segundo Prototipo

Proto2A

Proto2B

Proto2C

Detail




Segunda impresión del antebrazo, se opto por otras posiciones para su impresión. Aunque se logro un ensamble y ajuste adecuado es preferible optar por imprimir el antebrazo en solo dos piezas y no en cuatro como se ha venido realizando, aunque la unión de la piezas con el cloruro de metileno ha dado buenos resultados, el realizar un sola impresión garantiza el factor de seguridad y se obtendria un mejor ajuste al momento de ensamblar.
Reportes Actividades
Marzo 2020
| Viernes 26 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Corrección mano y dedos Prótesis Javier | 4 hr | 12 TS |
| Miercoles 24 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Actualización de Wiki y Ultimos detalles PCB V2.1 Prótesis Javier | 4 hr | 12 TS |
| Martes 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | detalles PBC V2.1 y pruebas dedos Prótesis Javier | 4 hr | 12 TS |
| Viernes 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño PCB V2.1 , Control Drivers Prótesis Javier | 4 hr | 12 TS |
| Miercoles 17 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Pruebas PCB V2.0 y refinamiento código control Prótesis Javier | 4 hr | 12 TS |
| Lunes 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | envió a elaborar PCB V2 Prótesis Javier | 4 hr | 12 TS |
| Viernes 12 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Dieseño PCB V2 , Drivers Prótesis Javier | 4 hr | 12 TS |
| Miercoles 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Dieseño PCB V2 , Mother Board Prótesis Javier | 4 hr | 12 TS |
| Lunes 08 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Dieseño PCB V2 , mother boardPrótesis Javier | 4 hr | 12 TS |
| Viernes 05 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño nueva PCB V2, etapa supply energyPrótesis Javier | 4 hr | 12 TS |
| Miercoles 03 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Evaluación actual del proyecto Prótesis Javier | 4 hr | 12 TS |
| Lunes 01 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Introducción Carlos al proyecto Prótesis Javier | 4 hr | 12 TS |
Febrero 2020
| Viernes 26 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Pruebas PCB v1 Prótesis Javier | 4 hr | 12 TS |
| Miercoles 24 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Pruebas PCB v1 Prótesis Javier | 4 hr | 12 TS |
| Lunes 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Conexión fuente energia, bateria Prótesis Javier | 4 hr | 12 TS |
| Viernes 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Soldadura componentes pcb v1 Prótesis Javier | 4 hr | 12 TS |
| Miercoles 17 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Soldadura componetes pcb V1 Prótesis Javier | 4 hr | 12 TS |
| Lunes 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Pruebas impresión dedos Prótesis Javier | 4 hr | 12 TS |
| Viernes 12 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Pruebas impresión cremallera PET Prótesis Javier | 4 hr | 12 TS |
| Miercoles 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Pruebas impresión cremallera TPU Prótesis Javier | 4 hr | 12 TS |
| Lunes 08 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Pruebas modificación cremalleras Prótesis Javier | 4 hr | 12 TS |
| Viernes 05 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Pruebas impresión dedo pulgar Prótesis Javier | 4 hr | 12 TS |
| Miercoles 03 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Pruebas impresión dedo pulgar Prótesis Javier | 4 hr | 12 TS |
| Lunes 01 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Pruebas modificación dedos Prótesis Javier | 4 hr | 12 TS |
Diciembre 2020
| Lunes 07 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Actualización Wiki, elaboración PCBs Prótesis Javier | 4 hr | 12 TS |
| Viernes 03 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Impresión plugs Prótesis Javier | 4 hr | 12 TS |
| Jueves 02 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Conexión Plugs Micro USB Prótesis Javier | 4 hr | 12 TS |
| Martes 01 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Elaboración PCBs Prótesis Javier | 4 hr | 12 TS |
Noviembre 2020
| Lunes 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Elaboración PCBs Prótesis Javier | 4 hr | 12 TS |
| Viernes 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Modificación Case y Muñeca Prótesis Javier | 4 hr | 12 TS |
| Jueves 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Correcciones PCB Prótesis Javier | 4 hr | 12 TS |
| Lunes 16 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Compra materiales para PCB Prótesis Javier | 4 hr | 12 TS |
| Sabado 14 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Modificación Piñones y Cremalleras Prótesis Javier | 4 hr | 12 TS |
| Viernes 13 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Modificación Case - Muñeca Prótesis Javier | 4 hr | 12 TS |
| Jueves 12 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Actualización Wiki Prótesis Javier | 1 hr | 3 TS |
| Miercoles 11 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Modificación PCBs Prótesis Javier | 3 hr | 9 TS |
| Martes 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño e impresión Plugs Prótesis Javier | 5 hr | 15 TS |
| Lunes 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Modificación PCB DriversPrótesis Javier | 4 hr | 12 TS |
Octubre 2020
| Viernes 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Modificación Código main Prótesis Javier | 4 hr | 12 TS |
| Jueves 29 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño PCB DriversPrótesis Javier | 4 hr | 12 TS |
| Martes 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño PCB Central Prótesis Javier | 4 hr | 12 TS |
| Lunes 26 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Modificaciones AntebrazoPrótesis Javier | 3 hr | 9 TS |
Septiembre 2020
| Miercoles 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Actualización Wiki Prótesis Javier | 1 hr | 3 TS |
| Martes 29 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | modificación AntebrazoPrótesis Javier | 4 hr | 12 TS |
| Jueves 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Correción fallas modelo antebrazo Prótesis Javier | 4 hr | 12 TS |
| Martes 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Análisis Fallas antebrazo Prótesis Javier | 3 hr | 9 TS |
| Lunes 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Actualización Wiki Prótesis Javier | 1 hr | 3 TS |
| Jueves 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Cambio de posición de dos plugs de la tarjetaPrótesis Javier | 3 hr | 9 TS |
| Viernes 11 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Ensamble y ajuste antebrazo, roscas tornillos Prótesis Javier | 5 hr | 15 TS |
| Jueves 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Unión piezaS ante brazoPrótesis Javier | 2 hr | 6 TS |
| Jueves 03 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Puilido piezas antebrazo Prótesis Javier | 5 hr | 15 TS |
Agosto 2020
| Jueves 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Rediseño piñon - cremallera Prótesis Javier | 5 hr | 15 TS |
| Martes 18 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Cambio orientación plugs de conexión tarjeta y actualización antebrazoPrótesis Javier | 5 hr | 15 TS |
| Sabado 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Actualización script de controlPrótesis Javier | 5 hr | 15 TS |
| Jueves 13 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Pruebas y calibración cremallera 3-4-5Prótesis Javier | 5 hr | 15 TS |
| Martes 11 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Actualización Wiki, verificación conexiones Prótesis Javier | 5 hr | 15 TS |
| Lunes 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Prueba de conexión correctas en la placa principalPrótesis Javier | 5 hr | 15 TS |
| Viernes 07 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Placa adicioal para potenciometros de mano Prótesis Javier | 5 hr | 15 TS |
| Miercoles 05 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Etapa de regulación de voltaje plugin's de conexión internaPrótesis Javier | 5 hr | 15 TS |
| Lunes 03 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Cambio plugin's de conexión internaPrótesis Javier | 5 hr | 15 TS |
Julio 2020
| Viernes 31 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Reconfiguración Electronica,cambio distribución al interior de la protesisPrótesis Javier | 5 hr | 15 TS |
| Jueves 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Generación ensamble completoPrótesis Javier | 4 hr | 12 TS |
| Jueves 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Generación de planos y actualización de la wikiPrótesis Javier | 5 hr | 15 TS |
| Miercoles 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Generación de piezas finalesPrótesis Javier | 5 hr | 15 TS |
| Martes 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Calibración sensores y trimmers | 2hr | 6 TS |
| David G. | Pruebas agarre tipo pinza, prueba con sensores | 2hr | 6 TS |
| Sabado 18 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Pruebas junta rotacional de la muñecaPrótesis Javier | 4 hr | 12 TS |
| Viernes 17 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Ensamble sistema de cremalleras suavesPrótesis Javier | 5 hr | 15 TS |
| Jueves 16 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Soldadura componentes electronicosPrótesis Javier | 4 hr | 12 TS |
| Día | Nombre | Descripción | Tiempo | TS |
|---|---|---|---|---|
| Miercoles 15/07 | Johan G | Impresión de piezas ajustadas Prótesis Javier | 6 hr | 18 TS |
| Miercoles 15/07 | David Gil | Diseño y ajustes Prótesis Javier | 5 hr | 15 TS |
| Viernes 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| Johan García | Impresión de piezas y entrega para ensamble | 2 hr | 6 TS |
| Miercoles 8 | Descripción | Tiempo | TS |
|---|---|---|---|
| Johan García | Impresión de piezas | 4 hr | 12 TS |
| Lunes 6 | Descripción | Tiempo | TS |
|---|---|---|---|
| Johan García | Impresión de piezas y entrega para ensamble | 2 hr | 6 TS |
| Jueves 2 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Recoger mano impresa modificada | 30 min | 2 TS |
| Jueves 2 | Descripción | Tiempo | TS |
|---|---|---|---|
| Johan García | Entrega de piezas para ensable | 2 hr | 6 TS |
| Miercoles 1 | Descripción | Tiempo | TS |
|---|---|---|---|
| Johan García | impresión mano modificada | 3 hr | 9 TS |
Junio 2020
| Martes 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Edición dedos y manos | 3 hr | 9 TS |
| Lunes 29 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Prueba cremallera indice | 3 hr | 9 TS |
| Viernes 26 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Pulido de piezas | 3 hr | 9 TS |
| Jueves 25 | Descripción | Tiempo | TS |
|---|---|---|---|
| Johan García | Entrega de piezas para ensable | 2 hr | 6 TS |
| Miercoles 24 | Descripción | Tiempo | TS |
|---|---|---|---|
| Johan García | Impresión mano | 2 hr | 6 TS |
| Martes 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| Johan García | Impresión mano | 2 hr | 6 TS |
| Lunes 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño ajuste mano-muñeca | 3 hr | 9 TS |
| Jueves 18 | Descripción | Tiempo | TS |
|---|---|---|---|
| Johan García | Impresión mano | 2 hr | 6 TS |
| Miercoles 17 | Descripción | Tiempo | TS |
|---|---|---|---|
| Johan García | Impresión mano | 2 hr | 6 TS |
| Martes 16 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño ajuste mano-muñeca | 3 hr | 9 TS |
Mayo 2020
| Jueves 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Cremalleras dedos 3-4-5 | 3 hr | 9 TS |
| Miercoles 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Rediseño ajuste de muñeca- mano | 3 hr | 9 TS |
| Domingo 24 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Prueba piezas nuevas ajuste de muñeca- mano | 3 hr | 9 TS |
| Miercoles 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| Johan García | Impresión piezas de prueba | 1 hr | 3 TS |
Abril 2019
| Miercoles 01 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Modificación Mano, ductos para las cremalleras | 4 hr | 12 TS |
Marzo 2019
| Martes 24 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Modificación Mano, ductos para las cremalleras | 4 hr | 12 TS |
| Martes 17 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Busqueda información Placa Teensy 3.2 | 4 hr | 12 TS |
| Martes 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Modificación a la muñeca, reorganización motores | 4 hr | 12 TS |
| Martes 03 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Reinicio actividades, investigación controlador que remplase al ArduinoMega | 4 hr | 12 TS |
Febrero 2019
| Martes 18 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño mesa prueba de fatiga para dedos y cremalleras | 4 hr | 12 TS |
| Martes 11 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Actualización Wiki y diseño mesa prueba de fatiga | 4 hr | 12 TS |
| Miercoles 05 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Conexión Reconocimiento de Voz (Matlab) con el Controlador (Arduino) para pruebas en mesa de fatiga | 4 hr | 12 TS |
Diciembre 2019
| Viernes 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Prueba prótesis con Javier | 4 hr | 12 TS |
| Juan Diego | Prueba prótesis con Javier | 4 hr | 12 TS |
| Jueves 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Ensamble parcial de la prótesis | 4 hr | 12 TS |
| Juan Diego | Ensamble parcial de la prótesis | 4 hr | 12 TS |
| Miercoles 18 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Adecuación de piezas de la protesis | 4 hr | 12 TS |
| Juan Diego | Adecuación de piezas de la protesis | 4 hr | 12 TS |
| Martes 17 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Programación del Arduino Mega, control codo y muñeca | 4 hr | 12 TS |
| Juan Diego | Programación del Arduino Mega | 4 hr | 12 TS |
| Lunes 16 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Impresión dedos y muñeca | 4 hr | 12 TS |
| Viernes 13 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Pulido piezas, continuando con impresión | 4 hr | 12 TS |
| Jueves 12 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Re impresión piezas codo y antebrazo | 4 hr | 12 TS |
| Miercoles 11 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Detalles codo y antebrazo previo a nueva imoresión | 4 hr | 12 TS |
| Martes 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño control codo y muñeca, detalles | 4 hr | 12 TS |
| Lunes 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Johan García | Imprimir piezas (Prótesis Javier) | 2 hr | 6 TS |
| David G. | Accionamiento movimientos pronación y supinación | 2 hr | 6 TS |
| Sabado 7 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño control codo y muñeca, actualización Wiki | 4 hr | 12 TS |
| Juan Diego | Diseño control codo | 2 hr | 6 TS |
| Viernes 6 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño control codo y muñeca, prueba rodamiento muñeca, impresión dedo | 4 hr | 12 TS |
| Juan Diego | Diseño control codo | 4 hr | 12 TS |
| Jueves 5 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Impresión nuevas cremalleras, impresión mano escala adecuada | 4 hr | 12 TS |
| Martes 3 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Impresión muñeca, prueba de sensores | 4 hr | 12 TS |
| Lunes 01 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Impresión muñeca, prueba de sensores | 4 hr | 12 TS |
Noviempre 2019
| sabado 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño Muñeca, ubicación motores para acionamiento de la mano | 4 hr | 12 TS |
| Jueves 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño Mano, adecuación parte interna para direcconamiento de las cremalleras, ajuste a muñeca | 4 hr | 12 TS |
| Martes 26 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño Mano, escalado y adecuación parte interna para direcconamiento de las cremalleras | 4 hr | 12 TS |
| Lunes 25 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Diseño del circuito eléctrico para visualizar el estado de la batería | 4 hr | 12 TS |
| Jueves 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Impresión piñones y cobertura de motores | 4 hr | 12 TS |
| Miercoles 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Pruebas de señal con el arduino y el sensor muscular | 4 hr | 12 TS |
| Martes 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Ajustes de diseño sobre los dedos a usar | 4 hr | 12 TS |
| David Gil R | Ajustes de diseño sobre los dedos a usar | 4 hr | 12 TS |
| Sábado 16 | Descripción | Tiempo | TS |
|---|---|---|---|
| DIego Chacón | Diseño mecanismo de la mano | 4 hr | 12 TS |
| David Gil R | Programación de motor | 4 hr | 12 TS |
| Viernes 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Diseño acople muñeca_mano | 4 hr | 12 TS |
| David Gil R | Impresión prueba dedo Indice | 4 hr | 12 TS |
| Jueves 14 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Diseño acople muñeca-mano, investigación de modelos de dedos | 4 hr | 12 TS |
| David Gil R | Modificación dedos | 3 hr | 9 TS |
| Miercoles 13 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Diseño ajuste antebrazo y mano | 3 hr | 9 TS |
| Jueves 7 | Descripción | Tiempo | TS |
|---|---|---|---|
| David Gil R | Selección modificación mano, acople | 4 hr | 12 TS |
| Miércoles 06 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Acople mano | 4 hr | 12 TS |
| Martes 05 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Reconocimiento ajustes para impresión final del antebrazo, conexión motor codo, pruebas | 4 hr | 12 TS |
| Jimmy M. | Reconocimiento ajustes para impresión final del antebrazo, conexión motor codo, pruebas | 4 hr | 12 TS |
| Viernes 01 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Ajustes piezas del codo y antebrazo | 4 hr | 12 TS |
| Jimmy M. | Ajustes piezas del codo y antebrazo | 4 hr | 12 TS |
Octubre 2019
| Jueves 31 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Diseño del acople de la mano | 4 hr | 12 TS |
| David G. | Impresión mitad codo, ajustes piezas del antebrazo | 4 hr | 12 TS |
| Miercoles 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Diseño del acople de la mano | 4 hr | 12 TS |
| Martes 29 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Diseño de la mano | 4 hr | 12 TS |
| David G. | Impresión cuarta parte antebrazo | 4 hr | 12 TS |
| Luenes 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Pruebas de señal con el arduino | 4 hr | 12 TS |
| David G. | Impresión tercera parte antebrazo | 4 hr | 12 TS |
| Viernes 25 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Pruebas de cremallera flexible | 4 hr | 12 TS |
| David G. | Impresión segunda parte antebrazo | 4 hr | 12 TS |
| Jueves 24 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Detalles pendientes antebrazo | 4 hr | 12 TS |
| Jimmy M. | Diseño de la mano. Pruebas de impresión cremallera flexible | 4 hr | 12 TS |
| Miercoles 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Impresión de la primera parte del antebrazo | 4 hr | 12 TS |
| Martes 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño y prueba de materiales en las cremalleras flexibles TPU - PP - PLA | 4 hr | 12 TS |
| Jimmy M. | Pruebas de impresión cremallera flexible | 4 hr | 12 TS |
| Lunes 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño de cremallera flexible | 4 hr | 12 TS |
| Jimmy M. | Programación y pruebas del sensor muscular en el arduino | 4 hr | 12 TS |
| Sábado 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| DIego Ch. | simulación mecanismo | 2 hr | 6 TS |
| Viernes 18 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño y prueba de impresión cremallera flexible TPU | 4 hr | 12 TS |
| Jimmy M. | Programación y pruebas del sensor muscular en el arduino | 4 hr | 12 TS |
| Miercoles 16 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Análisis del algoritmo que se usará para programar el arduino | 4 hr | 12 TS |
| Martes 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Análisis del algoritmo que se usará para programar el arduino | 4 hr | 12 TS |
| Sabado 12 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Detalles Antebrazo, zonas y piezas de sujeción y ajuste | 4 hr | 12 TS |
| Viernes 11 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Diseño alterno del giro para el antebrazo | 4 hr | 12 TS |
| David G. | Detalles Antebrazo, soporte arduino, apoyo motor codo | 4 hr | 12 TS |
| Jueves 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Diseño alterno del giro para el antebrazo | 4 hr | 12 TS |
| Miercoles 09 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Impresión de prueba para el giro del antebrazo, actualización de la wiki | 4 hr | 12 TS |
| Martes 08 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Impresión de prueba para el giro del antebrazo | 4 hr | 12 TS |
Comentarios: Se debe elegir un diseño definitivo del diseño, teniendo en cuenta las preferencias del beneficiario según conferencia telefónica con Él.
| Viernes 04 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Diseño alterno del antebrazo para mantener la estética del mismo | 4 hr | 12 TS |
| Jueves 03 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Impresión prueba de articulación para movimientos de pronación y supinación | 4 hr | 12 TS |
| David G. | Impresión prueba de articulación para movimientos de pronación y supinación | 5 hr | 15 TS |
| Miercoles 02 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Diseño del antebrazo con movimientos de pronación y supinación | 4 hr | 12 TS |
| Martes 01 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño articulación para movimientos de pronación y supinación | 4 hr | 12 TS |
| Jimmy M. | Diseño articulación para movimientos de pronación y supinación | 4 hr | 12 TS |
Septiembre 2019
| Lunes 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño e impresión de los engranes encargados de realizar los movimientos de pronación y supinación, prueba 2 | 4 hr | 12 TS |
| Jimmy M. | Diseño e impresión de los engranes encargados de realizar los movimientos de pronación y supinación, prueba 2 | 4 hr | 12 TS |
| Viernes 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño de los engranes encargados de realizar los movimientos de pronación y supinación | 3 hr | 9 TS |
| Jimmy M. | Diseño de los engranes encargados de realizar los movimientos de pronación y supinación | 4 hr | 12 TS |
| Jueves 26 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Calculos para los engranes encargados de realizar los movimientos de pronación y supinación y diseño CAD | 3 hr | 9 TS |
| Jimmy M. | Diseño CAD de los engranajes para los movimientos de pronación y supinación | 4 hr | 12 TS |
| Miercoles 25 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Actualización de la wiki protesis javier | 4 hr | 12 TS |
| Lunes 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Modificaciones al antebrazo, división por secciones | 4 hr | 12 TS |
| Jimmy M. | Actualización de la wiki protesis javier, Instrucciones al beneficiario para que pueda completar su perfil en la wiki y pueda consultar el avance de su proyecto en la misma | 4 hr | 12 TS |
COMENTARIOS: Se busca que el antebrazo tenga la posibilidad de brindar los movimientos de supinación y pronación.
| Sabado 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Ajustes al diseño del codo para correción de la ubicación del motor, y angulo articular | 4 hr | 12 TS |
COMENTARIOS: Corregido el diseño del codo respecto al motor, para que a 0° y 90° sobresalgan 4 cms del motor para ajustar al antebrazo. Limite articular de 100°.
| Viernes 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Diseño del acople entre el codo y el antebrazo. Actualización de la wiki protesis javier | 4 hr | 12 TS |
TODO: Según análisis mecánico se debe rediseñar el codo ya que el eje del motor no quedó centrado y al hacer el giro del antebrazo puede presentar problemas.
| Jueves 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Diseño del acople entre el codo y el antebrazo | 4 hr | 12 TS |
| Sebastian | Aporte ocasional de ideas para el diseño | 2 hr | 6 TS |
| Miercoles 18 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Pruebas y análisis ensamble codo | 4 hr | 12 TS |
TODO: análisis mecánico para adaptar el antebrazo a la prótesis
| Martes 17 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Ensamble del codo, pruebas y análisis | 4 hr | 12 TS |
| David G. | Impresión Codo y Actualización de Wiki | 4 hr | 12 |
| Lunes 16 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Impresión Codo y Actualización de Wiki | 4 hr | 12 |
| Sabado 14 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Impresión Codo | 2 hr | 6 TS |
| Viernes 13 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño prueba codo y acople a antebrazo | 3 hr | 9 TS |
| Jimmy M. | Diseño prueba codo y acople a antebrazo | 3 hr | 9 TS |
| Jueves 12 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Diseño del codo de acuerdo al motor seleccionado | 4 hr | 12 TS |
| Lunes 09 | Descripción | Tiempo | TS |
|---|---|---|---|
| David G. | Diseño del codo con base a motor seleccionado | 4 hr | 12 TS |
| Jimmy M. | Diseño del codo con base a motor seleccionado | 4 hr | 12 TS |
| Viernes 06 | Descripción | Tiempo | TS |
|---|---|---|---|
| j.martinez | De común acuerdo con el beneficiario se decidió usar los brazos que venían con la protesis que le dió la eps y partir de allí para el diseño de los brazos que se acomoden al pedido y comodidad de Él. También se le brinda información al beneficiario sobre como acceder a la web de la fundación y a la info de su proyecto | 120 mn | 6 TS |
| DavidG | Diseño y medidas | 1 hr | 3 TS |
| Alguien??? | Diseño y medidas | 1 hr | 3 TS |
| DIego Chacón | Diseño y medidas | 1 hr | 3 TS |
Alguien diseño preliminar de antebrazo junto con DavidG j.martinez y DIego Chacón.
TODO: análisis mecánico de la adaptación del socket para los brazos y de allí saldrán ideas para comenzar con el diseño
| Jueves 5 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Estudio del diseño en el entorno Fushion 3 | 1 hr | 3 TS |
| Martes 3 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Estudio del diseño en el entorno Fushion 3 | 1 hr | 3 TS |
| Lunes 2 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jimmy M. | Estudio del diseño en el entorno Fushion 3D | 1 hr | 3 TS |
Agosto 2019
| viernes 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| j.martinez | Familiarización con el programa de diseño Inventor Professional | 1 Hrs | 3 TS |
| Jueves 29 | Descripción | Tiempo | TS |
|---|---|---|---|
| j.martinez | Familiarización con el programa de diseño Inventor Professional | 1 Hrs | 3 TS |
| Miércoles 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| j.martinez | Familiarización con el programa de diseño Inventor Professional | 1 Hrs | 3 TS |
| Martes 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| j.martinez | Familiarización con el programa de diseño Inventor Professional | 1 Hrs | 3 TS |
| lunes 26 | Descripción | Tiempo | TS |
|---|---|---|---|
| j.martinez | Familiarización con el programa de diseño Inventor Professional | 4 Hrs | 3 TS |
| viernes 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| j.martinez | Ya que el beneficiario del proyecto optó por dejar las prótesis que la EPS le dió, se procedió a desarmarlas para su estudio y aprovechamiento | 2Hrs | 6 TS |
| jueves 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| j.martinez | Toma de medidas y fotografías de los muñones de las extremidades superiores incluyendo el escaneo 3D para digitalizar la información | 1Hr | 3 TS |
| Camilo Upegui | Ayuda con la toma de medidas y fotografías de las prótesis antiguas | 1Hr | 3 TS |