Difference between revisions of "Segunda protesis para Matias"
(→Evaluación Antropométrica) |
Johan García (talk | contribs) (→Plan de trabajo y fechas) |
||
| (249 intermediate revisions by 14 users not shown) | |||
| Line 12: | Line 12: | ||
*[https://es.utopiamaker.com/m3duto/user:582707 Español] | *[https://es.utopiamaker.com/m3duto/user:582707 Español] | ||
|} | |} | ||
| − | |||
== Presentacion == | == Presentacion == | ||
[[File:21371164 575158802607913 6791516914036845146 n.jpg|thumb]] | [[File:21371164 575158802607913 6791516914036845146 n.jpg|thumb]] | ||
=== Historico === | === Historico === | ||
| − | Matias | + | Matias a sus 10 años, en la ciudad de Bogotá, ha sido beneficiario de la primera prótesis 3D mioelectrica de brazo completo hecha en Colombia con la fundación [http://materializacion3d.com M3D]. En agosto de 2017 los voluntarios de [http://materializacion3d.com M3D] , Andres tolosa, Javier Garzon, [https://es.utopiamaker.com/m3duto/user:696179 Jaime Galindo], [https://es.utopiamaker.com/m3duto/user:289302 Cristina Aceveda] y Nicolas Huchet participaron a la fabricación la prótesis de Matias. |
=== Objetivo === | === Objetivo === | ||
| − | + | Este proyecto es un proyecto de vida para Matias. Vamos a documentar aqui todos los modelos de protesis que va a recibir Matias durante su proceso de crecimiento, tratando de tener para él siempre los mejores avances de la tecnologia, para que el uso de la prótesis puede ser cada vez más util para él. | |
== Recursos necesarios == | == Recursos necesarios == | ||
| Line 94: | Line 93: | ||
* [https://es.utopiamaker.com/m3duto/user: Andres?] | * [https://es.utopiamaker.com/m3duto/user: Andres?] | ||
| − | == Diseño y | + | == Prótesis modelo No.1 == |
| − | * | + | |
| + | ===Etapa 1: Medidas antopometricas === | ||
| + | |||
| + | Matías tiene una amputación a nivel del codo en el brazo derecho, esta prótesis sera una extensión de la extremidad a modo de codo y antebrazo la cual permitirá el movimiento de codo en un grado de libertad y mano flexible con un movimiento de pinza básico inicialmente. | ||
| + | |||
| + | <gallery> | ||
| + | WhatsApp Image 2019-08-27 at 10.21.08 AM.jpg|Vista Frontal | ||
| + | WhatsApp Image 2019-08-27 at 10.21.09 AM.jpg|Vista Lateral | ||
| + | WhatsApp Image 2019-08-27 at 10.21.10 AM.jpg|Vista Superior | ||
| + | Medidas Matias.jpeg|Medidas extremidad Matías tomadas | ||
| + | </gallery> | ||
| + | |||
| + | === Etapa 2: Diseño de Extremidad === | ||
| + | |||
| + | Para tener un modelo tridimensional del muñón de Matías se utilizó el software Skanect el cual realiza un scaner en 3D de la extremidad permitiendo recrearla digitalmente y así tener un referente al modelar la prótesis y sobretodo el socket para que las dimensiones sean adecuadas a las corporales del beneficiario, este modelo se escalo de acuerdo a las medidas antropometricas de Matías para así tener en cuenta los volúmenes que ocupan los componentes mecánicos y el circuito electrónico para el correcto funcionamiento de la prótesis | ||
| + | |||
| + | <gallery> | ||
| + | Escaner Matias.png|Escaner extremidad superior derecha Matías | ||
| + | </gallery> | ||
| + | |||
| + | ===Etapa 3: Antebrazo=== | ||
| + | |||
| + | Para el diseño del antebrazo se tuvo en cuenta el registro fotografico, el cual se inserto en el programa de modelamiento fusion 360 con el fin de diseñar la prótesis lo mas similiar a su extremidad izquierda como se ve en las imagenes 1 y 2, una vez realizado el moldeamiento se escalo a las medidas antropometricas reales de Matias y se procedió a realizar las piezas internas para adecuar de los sistemas electrónicos, mecánicos, y de energía. | ||
| + | |||
| + | <gallery> | ||
| + | Modelobrazo.png|thumb | ||
| + | Modelobrazo2.png|thumb | ||
| + | </gallery> | ||
| + | |||
| + | ===Etapa 4: Análisis Mecánico=== | ||
| + | Para esta prótesis se busca inicialmente dos tipos de movimientos, el primero el movimiento del codo y en segundo lugar el movimiento de los dedos generando dos tipos de agarre. | ||
| + | |||
| + | <gallery> | ||
| + | Movimiento3.jpg|Movimiento que se busca generar por el codo diseñado en la prótesis | ||
| + | Movimiento1.png|Movimiento tip de los dedos para generar un primer agarre | ||
| + | Movimiento2.png|Movimiento palmar los dedos para generar un segundo agarre | ||
| + | </gallery> | ||
| + | |||
| + | Para la ejecución de los movimientos presentados anteriormente se utilizan diferentes motores y adecuaciones como se muestran a continuación: | ||
| + | |||
| + | *Movimiento de flexión y extensión del brazo: | ||
| + | |||
| + | Para el movimiento de flexión y extensión se utiliza el servomotor sg 90 con el fin de generar la fuerza suficiente para el movimiento del antebrazo, teniendo en cuenta su peso, ya que en el antebrazo es donde se adecua la mayor parte eléctrica, electrónica y mecánica, ademas se busca generar la rápida ejecución del movimiento... | ||
| + | |||
| + | *Movimiento Tip y palmar de los dedos para generar agarres: | ||
| + | |||
| + | Para la ejecución de lo movimientos de pinza de la mano se utilizaron moto-reductores debido a su a lo torque y capacidad de generar compresión de los dedos, generando la suficiente fuerza para levantar objetos de peso liviano, ademas de una velocidad buena para la ejercicio de los movimientos | ||
| + | |||
| + | -Tip: Para este movimiento se implemento un moto-reductores.... el cual lleva en el eje un piñón lineal y a su vez va unido a un piñones de dientes el cual lleva una polea, en la cual se unirán los hilos que moverán los dedos pulgar, indice y corazón. | ||
| + | |||
| + | -Palmar: Para este movimiento se implementaron dos moto-reductores, el primero es el moto-reductor implementado en el movimiento tip pero tradicionalmente se implemento un moto-reductor el cual lleva en el eje un piñón lineal y a su vez va unido a un piñón de dientes el cual lleva una polea, en la cual se unirán los hilos que moverán los dedos anular y meñique de esta manera el movimiento generado sera de todos los dedos a la vez | ||
| + | |||
| + | ===Etapa 5: Diseño=== | ||
| + | |||
| + | Inicialmente se diseño una pieza interna para la adecuación del servomotor que cumple la funcion de movimiento de codo y para las baterías de alimentación de la prótesis, para ello se tuvo en cuenta que esta pieza ajustara exactamente en el modelo de antebrazo ya que sobre la misma se ensamblaría el socket y se ejecutaría la mayor fuerza al momento de mover el antebrazo (flexión en el codo). | ||
| + | Para este diseño de prótesis se busca que el eje del servomotor sobresalga del diseño de antebrazo, esto debido a que debe ir unido a las extenciones del socket las cuales son rígidas y de esta manera permitir el movimiento, por otra parte en el lado opuesto de la pieza se realiza una extensión a modo de eje con el fin que sobresalga del modelo de antebrazo ya que esto permitirá que se genere rotación, esta pieza es de gran importancia ya que sin ella no existiría movimiento del antrebazo, mano y muñeca. | ||
| + | <gallery> | ||
| + | Pieza3.png|Pieza interna para acople motor y baterías | ||
| + | Pieza1.png|Diseño de eje de rotación (rojo) y modificaciones de encaje a antebrazo (naranja) | ||
| + | Pieza2.png|Compartimiento para baterías(verde) | ||
| + | Pieza4.png|Perforaciones para tuercas(azul) y tornillos para acople de servomotor(verde) | ||
| + | Tornillos.png|Ensamblaje de servomotor a pieza de acople | ||
| + | Tornillos 2.png|Ensamblaje de servomotor y pieza a antebrazo | ||
| + | Eje1.png|Vista de ensamblaje de servomotor | ||
| + | Eje2.png|Vista de ensamblaje final al antebrazo | ||
| + | Servoprotesis2.png|Adecuación de pieza interior a antebrazo | ||
| + | </gallery> | ||
| + | |||
| + | Para la adecuación de la parte mecánica se realizo el diseño de una pieza en forma de lamina en la que se fijaron tanto los piñones como los motoreductores los cuales ejercerían el movimiento de los dedos para generar dos tipos de agarre | ||
| + | |||
| + | <gallery> | ||
| + | Medio2.png|Adecuación de motores y piñones vista diagonal | ||
| + | Medio3.png|Adecuación de motores y piñones vista superior | ||
| + | Medio4.png|Adecuación de motores y piñones vista lateral | ||
| + | Medio5.png|Adecuación de motores y piñones vista diagonal con ensamble a antebrazo | ||
| + | </gallery> | ||
| + | |||
| + | == Prótesis Matías No.2 == | ||
| + | |||
| + | ===Etapa 1: Modelado=== | ||
| + | Se realizo el diseño de la prótesis en base a las medidas, estas se observan como referencia de la distancia entre los diferentes elementos del brazo, al lado del modelo creado. | ||
| + | |||
| + | <gallery> | ||
| + | Medidasbrazo.jpg| Brazo con medidas | ||
| + | Laminasuperior.PNG|Pieza en forma de Lamina | ||
| + | Antebrazo_vista_isometrica.png |Vista isométrica del antebrazo diseñado para la prótesis de Matias | ||
| + | Antebrazo_vista_lateral.PNG |Vista lateral del antebrazo diseñado para la prótesis de Matias | ||
| + | Antebrazo_superior_superior.PNG |Vista superior del antebrazo diseñado para la prótesis de Matias | ||
| + | </gallery> | ||
| + | |||
| + | Teniendo en cuenta las medidas antropométricas tomadas y el scan realizado se empezó el proceso de modelado de la prótesis, para esto se tuvo en cuenta el espacio que ocupan los circuitos electrónicos junto con los actuadores mecánicos que permiten mover los dedos y flexionar el codo, se tratara de generar una prótesis que se asemeje lo mayor posible a sus medidas antropometricas reales. | ||
| + | |||
| + | ===Etapa 2: Partes de la Prótesis=== | ||
| + | |||
| + | Se modelaron cada una de las partes de la prótesis teniendo en cuenta las medidas, a continuación se verán de forma más detallada. | ||
| + | <gallery> | ||
| + | Capasuperiorbrazo.JPG| Capa del antebrazo | ||
| + | Capainferiorbrazo.JPG| Base del antebrazo | ||
| + | Codoconunion.JPG|Codo | ||
| + | Codoconunion2.JPG|Codo | ||
| + | </gallery> | ||
| + | |||
| + | ====Etapa 2.1: Socket==== | ||
| + | |||
| + | En un principio el socket se había diseñado con base en la forma del muñón de Matías, buscando cubrirlo en su totalidad (imágenes 1 y 2). En él se encuentran dos piezas que unen el socket con la prótesis del antebrazo y permiten el movimiento de ésta, una pieza se encarga de anclar el servomotor que moverá la prótesis y que hará de codo, y la otra, es un eje rotatorio de apoyo al socket. Sin embargo, este diseño no presentaba mucha firmeza y resistencia frente a esfuerzos mecánicos altos, por lo cual se descartó la idea de tener dos partes del socket. Posteriormente, se re-diseñó el socket con el fin de que una sola pieza cubriera más área del brazo y así mejorar su resistencia a esfuerzos, adicional a esto se le hizo un espacio al sensor mio-eléctrico que se va a utilizar ya que antes no se había tenido en cuenta y se mejoraron los anclajes al socket de las piezas de unión a la prótesis. Se imprimió la pieza de unión al servo para verificar que encajara bien. | ||
| + | |||
| + | <gallery> | ||
| + | WhatsApp Image 2019-09-04 at 3.19.12 PM.jpg|Imagen1: Primera modificación socket | ||
| + | WhatsApp Image 2019-09-04 at 3.20.13 PM.jpg|Imagen2: Primera modificación socket | ||
| + | Socket1.png|Imagen3: Segunda modificación socket | ||
| + | </gallery> | ||
| + | |||
| + | A partir de lo anterior, se puede identificar que las condiciones del socket no cumplen ni satisfacen las necesidades del paciente puesto que será incomodo acoplar las demás piezas como también impedirá el correcto funcionamiento y movimiento de la protesis, por lo cual se realiza un cambio en el mismo. | ||
| + | |||
| + | ====Etapa 2.2: Codo==== | ||
| + | Para el diseño del codo se tuvo presente las medidas que aparecen anexas en la wiki. Posteriormente se realizó el modelado en Fusion 360 con el din de que el paciente logre a partir de esta hacer movimientos "normales" con el codo, acoplando el mismo al antebrazo anteriormente diseñado. Una vez realizado el modelamiento se escaló a las medidas antropométricas reales de Matías y se procedió a realizar las piezas internas para el adecuamiento de los sistemas electrónicos, mecánicos, y de energía. | ||
| + | |||
| + | <gallery> | ||
| + | Codo_vita_lateral.PNG |Vista lateral del diseño del codo | ||
| + | Codo_vista_superior.PNG|Vista superior del diseño del codo | ||
| + | Codo.PNG |Vista isométrica del diseño del codo | ||
| + | Antebrazo+codo_-_isometrica.PNG |Vista isometrica del diseño del codo acoplado al antebrazo | ||
| + | Antebrazo+codo_-_superior.PNG |Vista superior del diseño del codo acoplado al antebrazo | ||
| + | Antebrazo+codo_-_lateral.PNG |Vista Lateral del diseño del codo acoplado al antebrazo | ||
| + | </gallery> | ||
| + | |||
| + | ====Etapa 2.3: Mano==== | ||
| + | Para el diseño de la mano se tuvo en cuenta que se pudieran realizar los movimientos (TIP y Palmar) de la mejor manera y que cumplan correctamente su función de agarre; por ello, se realizó un análisis de los movimientos con el fin de saber desde dónde se realizan, de qué manera se hacen y las partes involucradas en éste, posteriormente se definieron los requerimientos para cada movimiento (Tabla 1). Teniendo en cuenta lo anterior, se realizó una búsqueda de los posibles modelos que ayudaran a cumplir dichos requerimientos, de allí se presenta el primer prototipo de la mano que se obtuvo de https://www.thingiverse.com/thing:1679539. | ||
| + | <gallery> | ||
| + | Palmamano.PNG|Palma para la mano que se usara | ||
| + | Deedosmano.PNG|Dedos de la mano que se usara | ||
| + | </gallery> | ||
| + | |||
| + | Cabe resaltar, que la muñeca no tendrá ningún tipo de movimiento y quedará fija en una misma posición al antebrazo. | ||
| + | |||
| + | ===Etapa 3: Materiales=== | ||
| + | |||
| + | Materiales principales para la producción de la prótesis: | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Matriz de decisión para estructura | ||
| + | ! Rigidez | ||
| + | ! Dureza | ||
| + | ! Maleabilidad | ||
| + | ! Vida util | ||
| + | ! Total | ||
| + | |- | ||
| + | | PLA || 5 || 4.5 || 3 || 3 || 3,88 | ||
| + | |- | ||
| + | | Metálica || 5 || 4.5 || 1 || 5 || 3,87 | ||
| + | |- | ||
| + | | Fusion entre PLA y metálica || 5 || 5 || 3.8 || 5 || 4,7 | ||
| + | |- | ||
| + | | ABS || 5 || 4.5 || 3 || 3 || 3,88 | ||
| + | |} | ||
| + | |||
| + | NOTA: La calificación de la tabla anterior se implementa de 0.0 a 5.0, donde 5.0 será la calificación más alta y 0.0 la más baja. | ||
| + | |||
| + | En la tabla anterior se identifica que se planean utilizar PLA y Ninjaflex para la impresión de la extremidad, puesto que estos materiales cuentan con cualidades como tener bajo costo, ser manejable y que se cuentan con la maquinaria necesaria para su impresión. También se observa que el material ninjaflex es más costoso y cuenta con menor manejabilidad frente al PLA, por lo cual este se implantará en los dedos haciéndolos más flexible y con mayor acople a su necesidad. | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Matriz de decisión para escoger el software para el diseño y modelado de la estructura | ||
| + | ! La plataforma debe ser gratuita. | ||
| + | ! Lenguaje claro para el modelado. | ||
| + | ! Funciones básicas para el diseño | ||
| + | ! Vida util | ||
| + | ! Total | ||
| + | |- | ||
| + | | Maya|| 5 || 4 || 5 || 4 || 4,5 | ||
| + | |- | ||
| + | | Rhinocerous|| 3 || 4.2 || 5 || 4.3 || 4,13 | ||
| + | |- | ||
| + | | Studio design || 2 || 4.5 || 5 || 4.2 || 3,93 | ||
| + | |- | ||
| + | | Fusion360|| 5 || 5 || 5 || 5 || 5 | ||
| + | |} | ||
| + | |||
| + | NOTA: La calificación de la tabla anterior se implementa de 0.0 a 5.0, donde 5.0 será la calificación más alta y 0.0 la más baja. | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Matriz de decisión para motor de la estructura de la mano | ||
| + | ! Sensibilidad | ||
| + | ! Precisión | ||
| + | ! adaptación a la protesis | ||
| + | ! Vida util | ||
| + | ! Total | ||
| + | |- | ||
| + | | Servo.motor sg90|| 5 || 4 || 5 || 4 || 4,5 | ||
| + | |- | ||
| + | | FRS 400|| 5 || 4.2 || 5 || 4.3 || 4,62 | ||
| + | |- | ||
| + | | FSR 402 SHORT || 5 || 4.5 || 5 || 4.2 || 4,68 | ||
| + | |} | ||
| + | |||
| + | NOTA: La calificación de la tabla anterior se implementa de 0.0 a 5.0, donde 5.0 será la calificación más alta y 0.0 la más baja. | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Materiales | ||
| + | !Cantidad | ||
| + | |- | ||
| + | | Servo.motor SG 90|| 2 | ||
| + | |- | ||
| + | | Motor || 1 | ||
| + | |- | ||
| + | | Arduino nano|| 1 | ||
| + | |- | ||
| + | | Switch || 4 | ||
| + | |- | ||
| + | |Pulsadores || 2 | ||
| + | |- | ||
| + | |Bateria 9v || 1 | ||
| + | |- | ||
| + | |Jumpers Macho - Macho || 10 | ||
| + | |- | ||
| + | |Jumpers Macho - Hembra || 10 | ||
| + | |- | ||
| + | |Power Bank || 1 | ||
| + | |- | ||
| + | |Caja de bateria || 1 | ||
| + | |- | ||
| + | |Puente H - L298d || 1 | ||
| + | |} | ||
| + | |||
| + | ===Etapa 4: Cotizaciones=== | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | !Cantidad | ||
| + | ! Materiales | ||
| + | !Costo Unidad | ||
| + | !Costo total | ||
| + | |- | ||
| + | | 2|| Servo.motor SG 90|| 10.000 || 20.000 | ||
| + | |- | ||
| + | | 1|| Motor || 50.000 || 50.000 | ||
| + | |- | ||
| + | | 1 || Puente H -L298d || 10.000 || 10.000 | ||
| + | |- | ||
| + | | 1 || Arduino nano|| 15.000 || 15.000 | ||
| + | |- | ||
| + | | 4 ||Switch || 2.800 || 11.800 | ||
| + | |- | ||
| + | | 2 ||Pulsadores || 2.500 || 2.500 | ||
| + | |- | ||
| + | | 1|| Bateria 9v || 11.000 || 11.000 | ||
| + | |- | ||
| + | | 10 ||Jumpers Macho - Macho x 10 || 2.500 || 2.500 | ||
| + | |- | ||
| + | | 10 || Jumpers Macho - Hembra x 10|| 2.500 || 2.500 | ||
| + | |- | ||
| + | | 1|| Power Bank || 18.000 || 18.000 | ||
| + | |- | ||
| + | | 1||Caja de bateria || 3.000 || 3.000 | ||
| + | |- | ||
| + | |Total || || || 146.300 | ||
| + | |} | ||
| + | |||
| + | ===Etapa 5: Metodología=== | ||
| + | 1. Toma de medidas de Matías (medidas antropomórficas). | ||
| + | 2. Diseño del antebrazo. | ||
| + | 3. Diseño y/o descargar la mano con los dedos. | ||
| + | 4. Dimensionar los diseños. | ||
| + | 5. Impresión 3D. | ||
| + | 6. Pulir las piezas impresas. | ||
| + | 7. Pruebas de ensamble del antebrazo y la mano. | ||
| + | 8. Desarrollo de programación. | ||
| + | 9. Montaje electrónico. | ||
| + | 10. Pruebas del ensamble electrónico con el mecánico. | ||
| + | 11. Pruebas del montaje. | ||
| + | 12. Modelado del antebrazo segunda fase. | ||
| + | 13. Impresión de la segunda fase del antebrazo. | ||
| + | 14. Pos procesamiento de las piezas. | ||
| + | 15. Ensamble de la segunda fase del antebrazo y juste a lo acoplado anteriormente. | ||
| + | 16. Pruebas de funcionamiento | ||
| + | 17. Diseño del codo según el acople anterior. | ||
| + | 18. Impresión 3D. | ||
| + | 19. Pos procesamiento de la pieza. | ||
| + | 20. Ensamblaje electrónico (Motor) | ||
| + | 21. Ensamblaje del codo, motor y acople anterior. | ||
| + | 22. Modelo del socket según los acoples y ensamblajes anteriores. | ||
| + | 23. Impresión | ||
| + | 24. Pos procesamiento | ||
| + | 25. Ensamblaje de las piezas previas, electrónica y socket. | ||
| + | 26. Pruebas | ||
| + | 27. Ajustes | ||
| + | 28. Pruebas finales | ||
| + | |||
| + | ===Etapa 6: Montaje=== | ||
| + | |||
| + | La fase del montaje se divide en dos fases las cuales se encuentra ligadas de manera directa. | ||
| + | |||
| + | ====Etapa 6.1: Electrónica==== | ||
| + | |||
| + | El ideal de la parte electronica es: | ||
| + | |||
| + | *La prótesis contará con 4 switches, de los cuales 2 de ellos serán los encargados de mover los servomotores (1 switch por cada servomotor) y a su vez de halar o soltar el cañamo sujetado a los dedos (dos dedos por cada servomotor), de modo que estos se flexionen o se extiendan, donde uno de los motores será el responsable del dedo indice y corazón, y el siguiente servomotor responsable del anular y meñique, quedando de manera estática el pulgar. | ||
| + | |||
| + | *Contará con 2 pulsadores, los cuales cumplirán con la función de mover el motor anclado al codo de modo que este baje o suba según lo desee Matias oprimiendo un pulsador a la vez, puesto que uno de estos se encargará de mover el motor de modo que este suba y el otro pulsador de hacer girar en sentido contrario para que este baje. | ||
| + | |||
| + | *Se implementan dos fuentes con el fin de alimentar el sistema, de modo que se tiene una bateria de 9V y una powerbank de 5v. | ||
| + | |||
| + | <gallery> | ||
| + | A1.JPG | ||
| + | A2.JPG | ||
| + | </gallery> | ||
| + | |||
| + | |||
| + | =====Etapa 6.1.1: Programación===== | ||
| + | |||
| + | En cuanto a la programación, se realizó en arduino un software libre descargable por medio de google. | ||
| + | |||
| + | Se debe tener en cuenta: | ||
| + | |||
| + | * Al momento de cargar el programa en la placa se deben seguir los siguientes pasos: | ||
| + | 1. HERRAMIENTAS --> "Placa" --> Arduino Nano | ||
| + | |||
| + | 2. HERRAMIENTAS --> Puerto --> COM 4 (En el puerto USB donde se conecte el arduino al computador) | ||
| + | |||
| + | |||
| + | # #include <Servo.h> | ||
| + | |||
| + | Servo myservo1; // create servo object to control a servo | ||
| + | Servo myservo2; | ||
| + | int pos = 0; // variable to store the servo position | ||
| + | |||
| + | void setup() { | ||
| + | // put your setup code here, to run once: | ||
| + | pinMode(2, INPUT_PULLUP); //BOTON SUBIR | ||
| + | pinMode(3, INPUT_PULLUP); //BOTON BAJAR | ||
| + | pinMode(4, INPUT_PULLUP); //SWITCH ENABLE | ||
| + | pinMode(5, OUTPUT); //PUENTE H | ||
| + | pinMode(6, OUTPUT); //PUENTHE | ||
| + | pinMode(7, INPUT_PULLUP); //SWITCH SERVO 1 | ||
| + | pinMode(8, INPUT_PULLUP); //SWITCH SERVO 2 | ||
| + | myservo1.attach(9); // attaches the servo on pin 9 to the servo object | ||
| + | myservo2.attach(10); // attaches the servo on pin 9 to the servo object | ||
| + | //Serial.begin(9600); | ||
| + | } | ||
| + | |||
| + | void loop() { | ||
| + | // put your main code here, to run repeatedly: | ||
| + | if (digitalRead(4)) { | ||
| + | //CONTROL DE MOTOR DC | ||
| + | digitalWrite(5, digitalRead(2)); //LEO EL ESTADO DEL PIN 2, Y LO ENVIO AL PIN 5 QUE ME HACE GIRAR EL MOTOR EN 1 SENTIDO | ||
| + | digitalWrite(6, digitalRead(3)); | ||
| + | |||
| + | //CONTROL SERVOMOTORES | ||
| + | if (digitalRead(7)) { //SI EL SWITCH ESTA ACTIVAD, SE MUEVE A UN PUNTO, SI NO, SE MUEVE A OTRO PUNTO | ||
| + | myservo1.write(45); | ||
| + | } else { | ||
| + | myservo1.write(135); | ||
| + | } | ||
| + | |||
| + | if (digitalRead(8)) { | ||
| + | myservo2.write(45); | ||
| + | } else { | ||
| + | myservo2.write(135); | ||
| + | } | ||
| + | |||
| + | // Serial.print(digitalRead(2)); | ||
| + | // Serial.print("\t"); | ||
| + | // Serial.print(digitalRead(3)); | ||
| + | // Serial.print("\t"); | ||
| + | // Serial.print(digitalRead(7)); | ||
| + | // Serial.print("\t"); | ||
| + | // Serial.println(digitalRead(8)); | ||
| + | delay(500); | ||
| + | } | ||
| + | } | ||
| + | |||
| + | ====Etapa 6.2: Mecánica==== | ||
| + | |||
| + | *Se coloca el cañamo en cada uno de los dedos con el fin de permitir el movimiento y posteriormente se ingresan a la palma de la mano. | ||
| + | *Se acopla el antebrazo a la mano por medio de termo formación con el fin de completar el encaje. | ||
| + | |||
| + | <gallery> | ||
| + | A12.JPG | ||
| + | A3.JPG | ||
| + | A4.JPG | ||
| + | A5.JPG | ||
| + | A6.JPG | ||
| + | A7.JPG | ||
| + | A8.JPG | ||
| + | A9.JPG | ||
| + | A10.JPG | ||
| + | A11.JPG | ||
| + | </gallery> | ||
| + | |||
| + | ===Etapa 7: Resultados=== | ||
| + | <gallery> | ||
| + | A21.JPG | ||
| + | A22.JPG | ||
| + | A23.JPG | ||
| + | A25.JPG | ||
| + | </gallery> | ||
| + | |||
| + | ===Etapa 9:Posibles materiales === | ||
| + | ====Etapa 9.1: Motor DAIICHI==== | ||
| + | En cuanto a los motores que se desean implementar, esta el motor DAICHII ya que cuenta con una amplia movilidad en cuando a la flexión y torsión que debe hacer el paciente para la zona de codo, por otro lado se cuentan con servomotores los cuales se implementarán en la mano con el fin de que el paciente pueda realizar los movimientos necesarios en los dedos. De igual manera que los materiales para el ensamble fisico, el motor Daichii cuenta con menor calificación, puesto que son motores que llevan tiempo aprender a manejar por su función y por su costo. | ||
| + | <gallery> | ||
| + | 1112.JPG|Motor Daichii | ||
| + | </gallery> | ||
| + | |||
| + | ===Etapa 10:Posible solución=== | ||
| + | Evaluando el diseño anterior y teniendo en cuenta que el diseño del socket será aplazado por temas internos y por agilidad en el desarrollo de la parte electronica y mecanica del codo y la extremidad trasnhumeral, se observo que el motor propuesto DAICHII por sus costo, obtención y manejo era el apropiado para la función a desarrollar, por lo tanto se realizaron busquedas bibliograficas con el fin de encontrar y plantear una nueva solución u opción para tener más ideas sobre el control y el manejo principalmente del codo del paciente. | ||
| − | + | Por lo cual se plantea: | |
| − | + | <gallery> | |
| − | + | 1117.JPG| metodología electronica | |
| + | </gallery> | ||
| − | + | Con el fin de obtener un prototipo similar al que se muestra en la siguiente imagen: | |
<gallery> | <gallery> | ||
| − | + | 1118.JPG| Prótesis de codo | |
| − | + | 1119.JPG| Prótesis de codo | |
| − | |||
</gallery> | </gallery> | ||
| − | + | Haciendo uso de piñones proporcionales los cuales le harán generar el movimiento que el paciente desee por medio de servomotores HD- 1501MG: | |
| − | |||
<gallery> | <gallery> | ||
| − | + | 11120.JPG| Piñones | |
| − | + | 11121.JPG| Servomotor | |
| − | |||
| − | |||
</gallery> | </gallery> | ||
| − | === Diseño | + | NOTA: Documentación adquirida de http://www.scielo.org.mx/scielo.php?script=sci_arttext&pid=S0188-95322015000100006 |
| − | + | ||
| + | == Diseño y planos == | ||
| + | *Link Diseño: https://www.thingiverse.com/thing:3836109 | ||
| + | |||
== Actividades == | == Actividades == | ||
| − | === Septiembre 2019 === | + | |
| + | === Septiembre 2020 === | ||
| + | |||
| + | === Agosto 2020 === | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 28 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastián Ramírez] || Se diseño un programa para ubicar el motor en la posición deseada al presionar un piezoelectrico || 3 Horas || 9 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 27 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastián Ramírez] || Se arreglaron los motores y los dispositivos a usar para el prototipo final provenientes de prototipo anterior|| 3 Horas || 9 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miércoles 26 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastián Ramírez] || Continuamos trabajando en la prótesis que se nos entrego. Existen componentes que dado el uso que se les dio terminaron con su vida útil. Despegar la prótesis implica dañar el chasis sobre el cual se soportan los motores por la forma en la cual se ubicaron; para retirarlos se procedió a calentar un cutter y pasarlo por las lineas sobre las que se unen las dos piezas. Se diseño un programa para mover en dos posiciones el eje del servomotor || 3 Horas || 9 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 25 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastián Ramírez] || Trabajo con la prótesis desarrollada el semestre anterior, selección de componentes en estado para continuar con el proyecto de este semestre. Reunión para la toma de decisiones de diseños y componentes electrónicos|| 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 24 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastián Ramírez] || Documentación de los posibles diseños, selección de la metodología y ponderación de la estética del antebrazo|| 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 21 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastián Ramírez] || Búsqueda de variables y prototipos para el diseño final || 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 20 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastián Ramírez] || Visita al taller y planteamiento de objetivos || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miércoles 19 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:830669 Sebastián Ramírez] || contextualización del proyecto y del paciente || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | === Mayo 2020 === | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 27 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina] || Documentación en la WIKI || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Documentación en la WIKI|| 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 26 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina] || Entrega de la protesis || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Entrega de la protesis || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:382172 Johan García] || Entrega de la protesis || 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 22 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina] || Pruebas de ensamble final electronica + Mecanica || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Pruebas de ensamble final electronica + Mecanica|| 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 21 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:382172 Johan García] || impresion de piezas || 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| ensamble mecánico y electrónico, pruebas|| 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 20 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| Acople socket con el codo y exportar diseños stl|| 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 19 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| ensamble mecánico y electrónico, inicio de pruebas|| 8 Horas || 24 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| Acople socket con el codo y exportar diseños stl|| 8 Horas || 24 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 18 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Ensamble mecánico|| 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| Te diseño del socket|| 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 15 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Recoger materiales y Ensamble de las impresiones|| 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| Pruebas de la programación final|| 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 14 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Conexiones y acople de los materiales electronicos en proteus, como diseño electronico|| 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:382172 Johan García] || Impresión dedos || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 13 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:382172 Johan García] || Impresión mano || 2 Horas || 6 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| Pruebas de programación con los motores DC y los servomotores|| 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 12 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:382172 Johan García] || Impresión de Antebrazo || 2 Horas || 6 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Conexiones del motor DC con los pulsadores, los servomotores con los switch, puente H y pruebas de conexiones|| 8 Horas || 24 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| Programación de los motor dc con la fuente de poder, los pulsadores y los switch con los servomotores|| 8 Horas || 24 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 11 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Pruebas de los materiales, servomotores|| 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| Programación de los servomotor con la fuente de poder y los switch|| 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:382172 Johan García] || Impresión de Antebrazo || 2 Horas || 6 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 8 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Recepción de materiales y cambios de switch|| 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| Programación del motor con los pulsadores || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 6 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Insumos, adquisición de los materiales por medio de compra por internet y presencial || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| Diseño del motor Gw con el diseño del codo|| 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 5 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Cotizaciones de materiales en diferentes tiendas de electrónica || 8 Horas || 24 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| ajuste al diseño del brazo y antebrazo con el codo|| 8 Horas || 24 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 4 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Recoger materiales impresos, aclarar dudas y busqueda de materiales electronicos|| 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| ajuste al diseño del brazo y antebrazo con la mano|| 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | === Abril 2020 === | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 30 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Modelado del socket || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 29 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]||Modelado del antebrazo con los motores || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 28 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| Diseño del antebrazo con acoples y dimensionamiento para su impresión || 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Conexiones del servomotor al arduino nano y caracterización del motor || 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 27 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| Re diseño del antebrazo, disminuyendo su densidad e Identificacióndel motor encontrado en la fundación para su posterior uso|| 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Identificación, revisiones bibliográficas y caracterización del motor encontrado en la fundación para su posterior uso || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 24 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]||Diseño y acople del motor respecto al antebrazo || 4 Horas || 12 TS | ||
| + | |||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 23 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Cotizaciones del motor, identificar la posición adecuada del antebrazo con el motor || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 22 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]||Modelado del nuevo motor que se va a usar en la parte del codo para posterior ajuste. || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 21 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Búsqueda de motores e implementación de motorreductor con caja reductora 4632 12V 6RPM 30 kg.cm || 8 Horas || 24 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]||Re diseño de socket con sujetadores desde el hombro para prevenir la caída del mismo en el usuario (se piensa sujetar con velcro) || 8 Horas || 24 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 20 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Búsqueda de motores propuestos anteriormente para su compra y manera de suplir el mismo con nuevos elementos|| 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| Revisión bibliografica de conexiones y ajuste al diseño del brazo y antebrazo || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 17 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Búsqueda de motores e implementaciones en prótesis para codos como plan de contingencia si no es posible la adquisición o el manejo adecuado de los motores propuestos anteriormente, además se realiza cotizaciones sobre el investigado || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| Busqueda de motor propuesto con sus respectivas conexiones y motor sugerido, busqueda de motores implementados en protesis para el codo || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 16 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Retroalimentación de motor propuesto y motor sugerido, búsqueda de conexiones y distribuidores para el mismo || 4 Horas || 12 TS | ||
| + | |||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 15 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| busquedas bibliográficas de materiales solicitados para la ejecución de la prótesis y análisis de conexiones internas|| 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 14 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| Ajuste del socket desde el codo hasta el hombro siguiendo las medidas anexadas en la wiki, posterior a la conferencia con el jefe inmediato, se procede a realizar busquedas bibliográficas de materiales solicitados para la ejecución de la prótesis y análisis de conexiones internas|| 7:40 Horas || 23 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Revisiones bibliográficas de conexiones electrónicas a partir de los materiales mencionados anteriormente, ajuste de la wiki en cuanto a coherencia, ortografía, procedimiento, complemento y ajuste fotográfico. Ideas para conexiones internas || 7:40 Horas || 23 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 9 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Correcciones y documentación en la WIKI || 3 Horas || 9 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 8 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| Modelamiento del socket para ajuste|| 4 Hora || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 7 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| re diseño del modelo cotizaciones y busqueda de proveedores.|| 4 Hora || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Matrices de decisión de materiales y cotizaciones || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 6 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]||Corrección y re diseño del modelo.|| 4 Hora || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Identificación de materiales a usar y cotización. || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 3 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]||Creacion de plantilla de referencia para la protesis en el programa, actualizacion de las diferentes partes de la protesis en la wiki.|| 4 Hora || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 2 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:197823 Fabian Bustos]|| Reunion virtual para analisis del estado del proyecto || 1 Hora || 3 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Reunion virtual para analisis del estado del proyecto || 1 Hora || 3 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| Reunion virtual para analisis del estado del proyecto || 1 Hora || 3 TS | ||
| + | |} | ||
| + | |||
| + | === Marzo 2020 === | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | !Viernes 20 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Diseño del modelo de acuerdo a la escala real en mm y documentacion en la wiki de la prótesis|| 4 Horas || 12 TS | ||
| + | | | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| Planos de cada una de las piezas del modelo con sus debidas cotas|| 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 19 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio]|| Subir los modelos correspondientes de la prótesis de Matías (manos, codo, acople) a la plataforma thingenverse para su posterior descarga y documentacion en la wiki de la prótesis|| 4 Horas || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 18 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| Ensamble de los componentes en la simulación(codo, antebrazo, mano) Documentacion en la wiki de la protesis|| 4 Horas || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 17 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| Pruebas y simulación de la conexión motor sg90 con arduino uno, para el movimiento de la mano|| 7 Horas || 21 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio] || Revisión del desarrollo de la prótesis de Matias, acople de medidas acordadas según la wiki(previas) || 7 Horas || 21 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 16 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina]|| Documentación en la wiki “segunda prótesis para Matías”|| 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio] || Documentación en la wiki “segunda prótesis para Matías || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 13 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina] ||Caracteristicas y modelado del motor sg90 || 4 Horas || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 12 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio] ||Caracteristicas del motor daiichi y modelado del motor || 3 Horas || 9 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 11 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina] ||Modelado del socket y ajuste del antebrazo para acople de motores || 4 Horas || 12 TS | ||
| + | |} | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 10 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina] ||Modelado del antebrazo y acople con el diseño del codo || 3 Horas 40 min || 11 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio] ||Modelado antebrazo, organizar plataforma y subir diseños|| 3 Horas 40 min|| 11 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 9 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina] ||Modelado del codo para acople con el motor || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio] ||Busqueda y caracterizaciòn del posible motor a usar para acople con el motor|| 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 06 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina] ||Modelado del antebrazo para acople de motores y ajuste de la muñeca, actualización de datos con respecto a la prótesis y modelos || 4 Horas || 12 TS | ||
| + | |- | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 04 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina] ||Modelado del codo para acople de motor. || 4 Horas || 12 TS | ||
| + | |- | ||
| + | |||
| + | |} | ||
| + | |||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 3 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina] ||Modelado de la extremidad, acople hombre y placa || 5 Horas || 15 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio] ||Modelado de la extremidad y acople motores|| 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:329608 Maria Jose] ||Modelado de la extremidad ||3 Horas || 9 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 2 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina] ||Modelado de la extremidad y el ajuste del codo || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:740227 Valentina Osorio] ||Modelado de la extremidad y el ajuste del codo|| 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | === Febrero 2020 === | ||
| + | |||
| + | ====Reportes y TS==== | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 26 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:703375 Manuela Mora] ||Modelado de la extremidad y el ajuste del codo || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:447546 Julián Medina] ||Modelado de la extremidad y el ajuste del codo|| 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | === Diciembre 2019 === | ||
| + | |||
| + | ====Reportes y TS==== | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 3 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:936875 Luna León] ||Ajustes finales prótesis || 3 Horas || 9 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:272809 Juan Manuel Vargas] ||Ajustes finales prótesis|| 3 Horas || 9 TS | ||
| + | |} | ||
| + | |||
| + | === Noviembre 2019 === | ||
| + | |||
| + | ====Reportes y TS==== | ||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 19 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:936875 Luna León] ||Re impresión pieza de la mano|| 3 Horas || 9 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 15 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:936875 Luna León] ||Arreglo estético de la mano|| 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:282231 Jefersson Hernandez] ||Adecuación electrónica (regulador voltaje)|| 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 13 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:936875 Luna León] ||Union de piezas mano mediante cañamo|| 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:282231 Jefersson Hernandez] ||Adecuacion electronica (regulador voltaje)|| 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 12 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:936875 Luna León] ||Pulir y lijar piezas de la mano dedos|| 6 Horas || 18 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:282231 Jefersson Hernandez] ||Pulir y lijar la muñeca, adecuación de baterías|| 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 7 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:936875 Luna León] ||Impresión de dedos y uniones dedos|| 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 6 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:282231 Jefersson Hernandez] ||Modificación muñeca e impresión muñeca|| 7 Horas || 21 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:936875 Luna León] ||Modificaciones de mano|| 7 Horas || 21 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:934589 Mario] ||Clasificación de señales y redes neuronales|| 2 horas || 6 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! martes 5 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:936875 Luna León] ||Impresión piezas de la mano|| 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 01 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:282231 Jefersson Hernandez] ||Modificaciones diseño de muñeca, ya que la realizada presentaba complicaciones|| 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | === Octubre 2019 === | ||
====Reportes y TS==== | ====Reportes y TS==== | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 30 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:282231 Jefersson Hernandez] ||Modificaciones en piñones y parte mecánica del antebrazo e impresión piezas de la mano|| 8 Horas || 24 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:936875 Luna León] ||Impresión piezas de la mano|| 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Lunes 28 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:936875 Luna León] ||Impresión piezas de la mano|| 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miércoles 23 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:936875 Luna León] ||Impresión dedos de la mano|| 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:282231 Jefersson Hernandez] ||Adecuación piñones y reimpresión de pieza centro de antebrazo|| 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 22 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:936875 Luna León] ||Impresión dedos de la mano|| 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:282231 Jefersson Hernandez] ||Adecuación piñones y reimpresión de pieza centro de antebrazo|| 5 Horas || 15 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 18 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:936875 Luna León] ||Impresión dedos de la mano|| 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Jueves 17 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:282231 Jefersson Hernandez] ||Impresión pieza centro del antebrazo, mejoramiento piezas impresas y adecuacion de motores y piñones || 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Miercoles 16 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:936875 Luna León] ||Impresión piezas mano || 4 Horas || 12 TS | ||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:282231 Jefersson Hernandez] ||Impresión segunda parte antebrazo, mantenimiento y mejoramiento de la impresion || 6 Horas || 18 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Martes 15 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:936875 Luna León] ||Impresión piezas mano (falanges) || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable sortable collapsible" | ||
| + | ! Viernes 11 | ||
| + | ! Descripción | ||
| + | ! Tiempo | ||
| + | ! TS | ||
| + | |||
| + | |- | ||
| + | | [https://es.utopiamaker.com/m3duto/user:936875 Luna León] ||Impresión piezas mano || 4 Horas || 12 TS | ||
| + | |} | ||
| + | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
! Jueves 10 | ! Jueves 10 | ||
| Line 190: | Line 1,400: | ||
| [https://es.utopiamaker.com/m3duto/user:936875 Luna León] ||Modificación de la mano|| 6 Horas || 18 TS | | [https://es.utopiamaker.com/m3duto/user:936875 Luna León] ||Modificación de la mano|| 6 Horas || 18 TS | ||
|} | |} | ||
| + | |||
| + | |||
| + | |||
| + | === Septiembre 2019 === | ||
| + | ====Reportes y TS==== | ||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| Line 316: | Line 1,531: | ||
| [https://es.utopiamaker.com/m3duto/user:937955 DIego Chacón] || Escaner de Matias Días después || 2 Horas || 6 TS | | [https://es.utopiamaker.com/m3duto/user:937955 DIego Chacón] || Escaner de Matias Días después || 2 Horas || 6 TS | ||
|} | |} | ||
| − | + | ||
| − | + | Comentarios: marcar a [https://es.utopiamaker.com/m3duto/user:582707 Julian] pa definir un dia entre semana, hasta tarde para una primera entrega antes el 28 de septiembre. [https://es.utopiamaker.com/m3duto/user:582707 Julian] propone el jueves 26 en la noche. | |
| − | |||
| − | |||
| Line 333: | Line 1,546: | ||
| [https://es.utopiamaker.com/m3duto/user:936875 Luna León] ||Modificacion preeliminar de mano || 6 Horas || 18 TS | | [https://es.utopiamaker.com/m3duto/user:936875 Luna León] ||Modificacion preeliminar de mano || 6 Horas || 18 TS | ||
|} | |} | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| Line 364: | Line 1,571: | ||
|} | |} | ||
| − | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
! Jueves 5 | ! Jueves 5 | ||
| Line 374: | Line 1,580: | ||
| [https://es.utopiamaker.com/m3duto/user:282231 Jeff] ||Realización de Perforaciones para adecuación de servomotor, junto con sus tornillos y tuercas; se realiza la adecuación del eje de movimiento de la prótesis || 6 Horas || 18 TS | | [https://es.utopiamaker.com/m3duto/user:282231 Jeff] ||Realización de Perforaciones para adecuación de servomotor, junto con sus tornillos y tuercas; se realiza la adecuación del eje de movimiento de la prótesis || 6 Horas || 18 TS | ||
|} | |} | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| Line 392: | Line 1,590: | ||
| [https://es.utopiamaker.com/m3duto/user:282231 Jeff] y [https://es.utopiamaker.com/m3duto/user:936875 Luna León] || Modificacion de socket para unirlo con el antebrazo || 6 Horas || 18 TS | | [https://es.utopiamaker.com/m3duto/user:282231 Jeff] y [https://es.utopiamaker.com/m3duto/user:936875 Luna León] || Modificacion de socket para unirlo con el antebrazo || 6 Horas || 18 TS | ||
|} | |} | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| Line 410: | Line 1,600: | ||
| [https://es.utopiamaker.com/m3duto/user:282231 Jeff] y [https://es.utopiamaker.com/m3duto/user:936875 Luna León] || Adecuación servomotor y batería prótesis antebrazo en modelo de fussion 360 || 6 Horas || 18 TS | | [https://es.utopiamaker.com/m3duto/user:282231 Jeff] y [https://es.utopiamaker.com/m3duto/user:936875 Luna León] || Adecuación servomotor y batería prótesis antebrazo en modelo de fussion 360 || 6 Horas || 18 TS | ||
|} | |} | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
{| class="wikitable sortable collapsible" | {| class="wikitable sortable collapsible" | ||
| Line 437: | Line 1,618: | ||
WhatsApp Image 2019-09-02 at 3.21.02 PM.jpg|Pruebas circuito de adquisición utilizado en ("Real-Time Pattern Recognition for prosthetic hand") por [https://es.utopiamaker.com/m3duto/user:934589 mabloc] | WhatsApp Image 2019-09-02 at 3.21.02 PM.jpg|Pruebas circuito de adquisición utilizado en ("Real-Time Pattern Recognition for prosthetic hand") por [https://es.utopiamaker.com/m3duto/user:934589 mabloc] | ||
</gallery> | </gallery> | ||
| + | |||
| + | |||
| + | |||
=== Agosto 2019 === | === Agosto 2019 === | ||
Latest revision as of 20:32, 2 September 2020
Contents
- 1 Jefe de proyecto
- 2 Presentacion
- 3 Recursos necesarios
- 4 Equipo
- 5 Prótesis modelo No.1
- 6 Prótesis Matías No.2
- 7 Diseño y planos
- 8 Actividades
Jefe de proyecto
| Maker | Image | Profile |
|---|---|---|
| Rojas Julian |

Presentacion

Historico
Matias a sus 10 años, en la ciudad de Bogotá, ha sido beneficiario de la primera prótesis 3D mioelectrica de brazo completo hecha en Colombia con la fundación M3D. En agosto de 2017 los voluntarios de M3D , Andres tolosa, Javier Garzon, Jaime Galindo, Cristina Aceveda y Nicolas Huchet participaron a la fabricación la prótesis de Matias.
Objetivo
Este proyecto es un proyecto de vida para Matias. Vamos a documentar aqui todos los modelos de protesis que va a recibir Matias durante su proceso de crecimiento, tratando de tener para él siempre los mejores avances de la tecnologia, para que el uso de la prótesis puede ser cada vez más util para él.
Recursos necesarios
* Recursos humanos: * Coordinadores que recepcionan y administran el dia a dia del fablab, del lunes al sabado: 3 horas en la mañana y 3 en la tarde. * fisioterapeuta: 2 horas * Psicologo: 5 horas * ingenieros: 90 horas * Fablab manager: 20 horas * diseñador: 90 horas
* Recursos financieros:
* Servomotor, baterias, sensores para la protesis:700.000cop(200€)
* Materiales para impresion y diversas heramientas: 350.000cop(100€)
Total presupuesto: 1.050.000cop(300€)
Equipo
Ingenieros y fablab managers:
| Maker | Foto |
|---|---|
| Luna León |

| Maker | Foto |
|---|---|
| Jeferson Hernandez |

| Maker | Foto |
|---|---|
| Kraszewski Nicolas |

| Maker | Foto |
|---|---|
| Bustos Fabian |

| Maker | Foto |
|---|---|
| mabloc |

| Maker | Foto |
|---|---|
| Cris |

Fisioterapeuta:
| Maker | Foto |
|---|---|
| Lorena13 |

Psicologo:
Prótesis modelo No.1
Etapa 1: Medidas antopometricas
Matías tiene una amputación a nivel del codo en el brazo derecho, esta prótesis sera una extensión de la extremidad a modo de codo y antebrazo la cual permitirá el movimiento de codo en un grado de libertad y mano flexible con un movimiento de pinza básico inicialmente.

Vista Frontal

Vista Lateral

Vista Superior

Medidas extremidad Matías tomadas




Etapa 2: Diseño de Extremidad
Para tener un modelo tridimensional del muñón de Matías se utilizó el software Skanect el cual realiza un scaner en 3D de la extremidad permitiendo recrearla digitalmente y así tener un referente al modelar la prótesis y sobretodo el socket para que las dimensiones sean adecuadas a las corporales del beneficiario, este modelo se escalo de acuerdo a las medidas antropometricas de Matías para así tener en cuenta los volúmenes que ocupan los componentes mecánicos y el circuito electrónico para el correcto funcionamiento de la prótesis

Escaner extremidad superior derecha Matías

Etapa 3: Antebrazo
Para el diseño del antebrazo se tuvo en cuenta el registro fotografico, el cual se inserto en el programa de modelamiento fusion 360 con el fin de diseñar la prótesis lo mas similiar a su extremidad izquierda como se ve en las imagenes 1 y 2, una vez realizado el moldeamiento se escalo a las medidas antropometricas reales de Matias y se procedió a realizar las piezas internas para adecuar de los sistemas electrónicos, mecánicos, y de energía.

thumb

thumb
Etapa 4: Análisis Mecánico
Para esta prótesis se busca inicialmente dos tipos de movimientos, el primero el movimiento del codo y en segundo lugar el movimiento de los dedos generando dos tipos de agarre.

Movimiento que se busca generar por el codo diseñado en la prótesis

Movimiento tip de los dedos para generar un primer agarre
Movimiento palmar los dedos para generar un segundo agarre


Para la ejecución de los movimientos presentados anteriormente se utilizan diferentes motores y adecuaciones como se muestran a continuación:
- Movimiento de flexión y extensión del brazo:
Para el movimiento de flexión y extensión se utiliza el servomotor sg 90 con el fin de generar la fuerza suficiente para el movimiento del antebrazo, teniendo en cuenta su peso, ya que en el antebrazo es donde se adecua la mayor parte eléctrica, electrónica y mecánica, ademas se busca generar la rápida ejecución del movimiento...
- Movimiento Tip y palmar de los dedos para generar agarres:
Para la ejecución de lo movimientos de pinza de la mano se utilizaron moto-reductores debido a su a lo torque y capacidad de generar compresión de los dedos, generando la suficiente fuerza para levantar objetos de peso liviano, ademas de una velocidad buena para la ejercicio de los movimientos
-Tip: Para este movimiento se implemento un moto-reductores.... el cual lleva en el eje un piñón lineal y a su vez va unido a un piñones de dientes el cual lleva una polea, en la cual se unirán los hilos que moverán los dedos pulgar, indice y corazón.
-Palmar: Para este movimiento se implementaron dos moto-reductores, el primero es el moto-reductor implementado en el movimiento tip pero tradicionalmente se implemento un moto-reductor el cual lleva en el eje un piñón lineal y a su vez va unido a un piñón de dientes el cual lleva una polea, en la cual se unirán los hilos que moverán los dedos anular y meñique de esta manera el movimiento generado sera de todos los dedos a la vez
Etapa 5: Diseño
Inicialmente se diseño una pieza interna para la adecuación del servomotor que cumple la funcion de movimiento de codo y para las baterías de alimentación de la prótesis, para ello se tuvo en cuenta que esta pieza ajustara exactamente en el modelo de antebrazo ya que sobre la misma se ensamblaría el socket y se ejecutaría la mayor fuerza al momento de mover el antebrazo (flexión en el codo). Para este diseño de prótesis se busca que el eje del servomotor sobresalga del diseño de antebrazo, esto debido a que debe ir unido a las extenciones del socket las cuales son rígidas y de esta manera permitir el movimiento, por otra parte en el lado opuesto de la pieza se realiza una extensión a modo de eje con el fin que sobresalga del modelo de antebrazo ya que esto permitirá que se genere rotación, esta pieza es de gran importancia ya que sin ella no existiría movimiento del antrebazo, mano y muñeca.

Pieza interna para acople motor y baterías
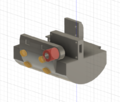
Diseño de eje de rotación (rojo) y modificaciones de encaje a antebrazo (naranja)
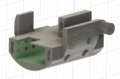
Compartimiento para baterías(verde)

Perforaciones para tuercas(azul) y tornillos para acople de servomotor(verde)

Ensamblaje de servomotor a pieza de acople

Ensamblaje de servomotor y pieza a antebrazo
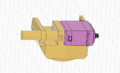
Vista de ensamblaje de servomotor
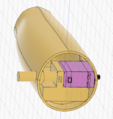
Vista de ensamblaje final al antebrazo
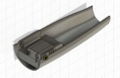
Adecuación de pieza interior a antebrazo









Para la adecuación de la parte mecánica se realizo el diseño de una pieza en forma de lamina en la que se fijaron tanto los piñones como los motoreductores los cuales ejercerían el movimiento de los dedos para generar dos tipos de agarre
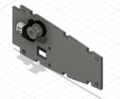
Adecuación de motores y piñones vista diagonal

Adecuación de motores y piñones vista superior

Adecuación de motores y piñones vista lateral
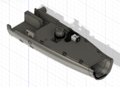
Adecuación de motores y piñones vista diagonal con ensamble a antebrazo



Prótesis Matías No.2
Etapa 1: Modelado
Se realizo el diseño de la prótesis en base a las medidas, estas se observan como referencia de la distancia entre los diferentes elementos del brazo, al lado del modelo creado.

Brazo con medidas

Pieza en forma de Lamina

Vista isométrica del antebrazo diseñado para la prótesis de Matias

Vista lateral del antebrazo diseñado para la prótesis de Matias

Vista superior del antebrazo diseñado para la prótesis de Matias



Teniendo en cuenta las medidas antropométricas tomadas y el scan realizado se empezó el proceso de modelado de la prótesis, para esto se tuvo en cuenta el espacio que ocupan los circuitos electrónicos junto con los actuadores mecánicos que permiten mover los dedos y flexionar el codo, se tratara de generar una prótesis que se asemeje lo mayor posible a sus medidas antropometricas reales.
Etapa 2: Partes de la Prótesis
Se modelaron cada una de las partes de la prótesis teniendo en cuenta las medidas, a continuación se verán de forma más detallada.

Capa del antebrazo

Base del antebrazo

Codo

Codo




Etapa 2.1: Socket
En un principio el socket se había diseñado con base en la forma del muñón de Matías, buscando cubrirlo en su totalidad (imágenes 1 y 2). En él se encuentran dos piezas que unen el socket con la prótesis del antebrazo y permiten el movimiento de ésta, una pieza se encarga de anclar el servomotor que moverá la prótesis y que hará de codo, y la otra, es un eje rotatorio de apoyo al socket. Sin embargo, este diseño no presentaba mucha firmeza y resistencia frente a esfuerzos mecánicos altos, por lo cual se descartó la idea de tener dos partes del socket. Posteriormente, se re-diseñó el socket con el fin de que una sola pieza cubriera más área del brazo y así mejorar su resistencia a esfuerzos, adicional a esto se le hizo un espacio al sensor mio-eléctrico que se va a utilizar ya que antes no se había tenido en cuenta y se mejoraron los anclajes al socket de las piezas de unión a la prótesis. Se imprimió la pieza de unión al servo para verificar que encajara bien.

Imagen1: Primera modificación socket

Imagen2: Primera modificación socket

Imagen3: Segunda modificación socket



A partir de lo anterior, se puede identificar que las condiciones del socket no cumplen ni satisfacen las necesidades del paciente puesto que será incomodo acoplar las demás piezas como también impedirá el correcto funcionamiento y movimiento de la protesis, por lo cual se realiza un cambio en el mismo.
Etapa 2.2: Codo
Para el diseño del codo se tuvo presente las medidas que aparecen anexas en la wiki. Posteriormente se realizó el modelado en Fusion 360 con el din de que el paciente logre a partir de esta hacer movimientos "normales" con el codo, acoplando el mismo al antebrazo anteriormente diseñado. Una vez realizado el modelamiento se escaló a las medidas antropométricas reales de Matías y se procedió a realizar las piezas internas para el adecuamiento de los sistemas electrónicos, mecánicos, y de energía.

Vista lateral del diseño del codo
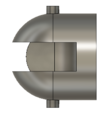
Vista superior del diseño del codo

Vista isométrica del diseño del codo

Vista isometrica del diseño del codo acoplado al antebrazo

Vista superior del diseño del codo acoplado al antebrazo

Vista Lateral del diseño del codo acoplado al antebrazo




Etapa 2.3: Mano
Para el diseño de la mano se tuvo en cuenta que se pudieran realizar los movimientos (TIP y Palmar) de la mejor manera y que cumplan correctamente su función de agarre; por ello, se realizó un análisis de los movimientos con el fin de saber desde dónde se realizan, de qué manera se hacen y las partes involucradas en éste, posteriormente se definieron los requerimientos para cada movimiento (Tabla 1). Teniendo en cuenta lo anterior, se realizó una búsqueda de los posibles modelos que ayudaran a cumplir dichos requerimientos, de allí se presenta el primer prototipo de la mano que se obtuvo de https://www.thingiverse.com/thing:1679539.
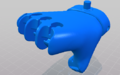
Palma para la mano que se usara
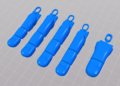
Dedos de la mano que se usara


Cabe resaltar, que la muñeca no tendrá ningún tipo de movimiento y quedará fija en una misma posición al antebrazo.
Etapa 3: Materiales
Materiales principales para la producción de la prótesis:
| Matriz de decisión para estructura | Rigidez | Dureza | Maleabilidad | Vida util | Total |
|---|---|---|---|---|---|
| PLA | 5 | 4.5 | 3 | 3 | 3,88 |
| Metálica | 5 | 4.5 | 1 | 5 | 3,87 |
| Fusion entre PLA y metálica | 5 | 5 | 3.8 | 5 | 4,7 |
| ABS | 5 | 4.5 | 3 | 3 | 3,88 |
NOTA: La calificación de la tabla anterior se implementa de 0.0 a 5.0, donde 5.0 será la calificación más alta y 0.0 la más baja.
En la tabla anterior se identifica que se planean utilizar PLA y Ninjaflex para la impresión de la extremidad, puesto que estos materiales cuentan con cualidades como tener bajo costo, ser manejable y que se cuentan con la maquinaria necesaria para su impresión. También se observa que el material ninjaflex es más costoso y cuenta con menor manejabilidad frente al PLA, por lo cual este se implantará en los dedos haciéndolos más flexible y con mayor acople a su necesidad.
| Matriz de decisión para escoger el software para el diseño y modelado de la estructura | La plataforma debe ser gratuita. | Lenguaje claro para el modelado. | Funciones básicas para el diseño | Vida util | Total |
|---|---|---|---|---|---|
| Maya | 5 | 4 | 5 | 4 | 4,5 |
| Rhinocerous | 3 | 4.2 | 5 | 4.3 | 4,13 |
| Studio design | 2 | 4.5 | 5 | 4.2 | 3,93 |
| Fusion360 | 5 | 5 | 5 | 5 | 5 |
NOTA: La calificación de la tabla anterior se implementa de 0.0 a 5.0, donde 5.0 será la calificación más alta y 0.0 la más baja.
| Matriz de decisión para motor de la estructura de la mano | Sensibilidad | Precisión | adaptación a la protesis | Vida util | Total |
|---|---|---|---|---|---|
| Servo.motor sg90 | 5 | 4 | 5 | 4 | 4,5 |
| FRS 400 | 5 | 4.2 | 5 | 4.3 | 4,62 |
| FSR 402 SHORT | 5 | 4.5 | 5 | 4.2 | 4,68 |
NOTA: La calificación de la tabla anterior se implementa de 0.0 a 5.0, donde 5.0 será la calificación más alta y 0.0 la más baja.
| Materiales | Cantidad |
|---|---|
| Servo.motor SG 90 | 2 |
| Motor | 1 |
| Arduino nano | 1 |
| Switch | 4 |
| Pulsadores | 2 |
| Bateria 9v | 1 |
| Jumpers Macho - Macho | 10 |
| Jumpers Macho - Hembra | 10 |
| Power Bank | 1 |
| Caja de bateria | 1 |
| Puente H - L298d | 1 |
Etapa 4: Cotizaciones
| Cantidad | Materiales | Costo Unidad | Costo total |
|---|---|---|---|
| 2 | Servo.motor SG 90 | 10.000 | 20.000 |
| 1 | Motor | 50.000 | 50.000 |
| 1 | Puente H -L298d | 10.000 | 10.000 |
| 1 | Arduino nano | 15.000 | 15.000 |
| 4 | Switch | 2.800 | 11.800 |
| 2 | Pulsadores | 2.500 | 2.500 |
| 1 | Bateria 9v | 11.000 | 11.000 |
| 10 | Jumpers Macho - Macho x 10 | 2.500 | 2.500 |
| 10 | Jumpers Macho - Hembra x 10 | 2.500 | 2.500 |
| 1 | Power Bank | 18.000 | 18.000 |
| 1 | Caja de bateria | 3.000 | 3.000 |
| Total | 146.300 |
Etapa 5: Metodología
1. Toma de medidas de Matías (medidas antropomórficas). 2. Diseño del antebrazo. 3. Diseño y/o descargar la mano con los dedos. 4. Dimensionar los diseños. 5. Impresión 3D. 6. Pulir las piezas impresas. 7. Pruebas de ensamble del antebrazo y la mano. 8. Desarrollo de programación. 9. Montaje electrónico. 10. Pruebas del ensamble electrónico con el mecánico. 11. Pruebas del montaje. 12. Modelado del antebrazo segunda fase. 13. Impresión de la segunda fase del antebrazo. 14. Pos procesamiento de las piezas. 15. Ensamble de la segunda fase del antebrazo y juste a lo acoplado anteriormente. 16. Pruebas de funcionamiento 17. Diseño del codo según el acople anterior. 18. Impresión 3D. 19. Pos procesamiento de la pieza. 20. Ensamblaje electrónico (Motor) 21. Ensamblaje del codo, motor y acople anterior. 22. Modelo del socket según los acoples y ensamblajes anteriores. 23. Impresión 24. Pos procesamiento 25. Ensamblaje de las piezas previas, electrónica y socket. 26. Pruebas 27. Ajustes 28. Pruebas finales
Etapa 6: Montaje
La fase del montaje se divide en dos fases las cuales se encuentra ligadas de manera directa.
Etapa 6.1: Electrónica
El ideal de la parte electronica es:
- La prótesis contará con 4 switches, de los cuales 2 de ellos serán los encargados de mover los servomotores (1 switch por cada servomotor) y a su vez de halar o soltar el cañamo sujetado a los dedos (dos dedos por cada servomotor), de modo que estos se flexionen o se extiendan, donde uno de los motores será el responsable del dedo indice y corazón, y el siguiente servomotor responsable del anular y meñique, quedando de manera estática el pulgar.
- Contará con 2 pulsadores, los cuales cumplirán con la función de mover el motor anclado al codo de modo que este baje o suba según lo desee Matias oprimiendo un pulsador a la vez, puesto que uno de estos se encargará de mover el motor de modo que este suba y el otro pulsador de hacer girar en sentido contrario para que este baje.
- Se implementan dos fuentes con el fin de alimentar el sistema, de modo que se tiene una bateria de 9V y una powerbank de 5v.


Etapa 6.1.1: Programación
En cuanto a la programación, se realizó en arduino un software libre descargable por medio de google.
Se debe tener en cuenta:
- Al momento de cargar el programa en la placa se deben seguir los siguientes pasos:
1. HERRAMIENTAS --> "Placa" --> Arduino Nano
2. HERRAMIENTAS --> Puerto --> COM 4 (En el puerto USB donde se conecte el arduino al computador)
- #include <Servo.h>
Servo myservo1; // create servo object to control a servo Servo myservo2; int pos = 0; // variable to store the servo position
void setup() {
// put your setup code here, to run once: pinMode(2, INPUT_PULLUP); //BOTON SUBIR pinMode(3, INPUT_PULLUP); //BOTON BAJAR pinMode(4, INPUT_PULLUP); //SWITCH ENABLE pinMode(5, OUTPUT); //PUENTE H pinMode(6, OUTPUT); //PUENTHE pinMode(7, INPUT_PULLUP); //SWITCH SERVO 1 pinMode(8, INPUT_PULLUP); //SWITCH SERVO 2 myservo1.attach(9); // attaches the servo on pin 9 to the servo object myservo2.attach(10); // attaches the servo on pin 9 to the servo object //Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
if (digitalRead(4)) {
//CONTROL DE MOTOR DC
digitalWrite(5, digitalRead(2)); //LEO EL ESTADO DEL PIN 2, Y LO ENVIO AL PIN 5 QUE ME HACE GIRAR EL MOTOR EN 1 SENTIDO
digitalWrite(6, digitalRead(3));
//CONTROL SERVOMOTORES
if (digitalRead(7)) { //SI EL SWITCH ESTA ACTIVAD, SE MUEVE A UN PUNTO, SI NO, SE MUEVE A OTRO PUNTO
myservo1.write(45);
} else {
myservo1.write(135);
}
if (digitalRead(8)) {
myservo2.write(45);
} else {
myservo2.write(135);
}
// Serial.print(digitalRead(2)); // Serial.print("\t"); // Serial.print(digitalRead(3)); // Serial.print("\t"); // Serial.print(digitalRead(7)); // Serial.print("\t"); // Serial.println(digitalRead(8));
delay(500); }
}
Etapa 6.2: Mecánica
- Se coloca el cañamo en cada uno de los dedos con el fin de permitir el movimiento y posteriormente se ingresan a la palma de la mano.
- Se acopla el antebrazo a la mano por medio de termo formación con el fin de completar el encaje.








Etapa 7: Resultados

Etapa 9:Posibles materiales
Etapa 9.1: Motor DAIICHI
En cuanto a los motores que se desean implementar, esta el motor DAICHII ya que cuenta con una amplia movilidad en cuando a la flexión y torsión que debe hacer el paciente para la zona de codo, por otro lado se cuentan con servomotores los cuales se implementarán en la mano con el fin de que el paciente pueda realizar los movimientos necesarios en los dedos. De igual manera que los materiales para el ensamble fisico, el motor Daichii cuenta con menor calificación, puesto que son motores que llevan tiempo aprender a manejar por su función y por su costo.

Motor Daichii

Etapa 10:Posible solución
Evaluando el diseño anterior y teniendo en cuenta que el diseño del socket será aplazado por temas internos y por agilidad en el desarrollo de la parte electronica y mecanica del codo y la extremidad trasnhumeral, se observo que el motor propuesto DAICHII por sus costo, obtención y manejo era el apropiado para la función a desarrollar, por lo tanto se realizaron busquedas bibliograficas con el fin de encontrar y plantear una nueva solución u opción para tener más ideas sobre el control y el manejo principalmente del codo del paciente.
Por lo cual se plantea:

metodología electronica
Con el fin de obtener un prototipo similar al que se muestra en la siguiente imagen:

Prótesis de codo

Prótesis de codo


Haciendo uso de piñones proporcionales los cuales le harán generar el movimiento que el paciente desee por medio de servomotores HD- 1501MG:

Piñones

Servomotor


NOTA: Documentación adquirida de http://www.scielo.org.mx/scielo.php?script=sci_arttext&pid=S0188-95322015000100006
Diseño y planos
- Link Diseño: https://www.thingiverse.com/thing:3836109
Actividades
Septiembre 2020
Agosto 2020
| Viernes 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastián Ramírez | Se diseño un programa para ubicar el motor en la posición deseada al presionar un piezoelectrico | 3 Horas | 9 TS |
| Jueves 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastián Ramírez | Se arreglaron los motores y los dispositivos a usar para el prototipo final provenientes de prototipo anterior | 3 Horas | 9 TS |
| Miércoles 26 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastián Ramírez | Continuamos trabajando en la prótesis que se nos entrego. Existen componentes que dado el uso que se les dio terminaron con su vida útil. Despegar la prótesis implica dañar el chasis sobre el cual se soportan los motores por la forma en la cual se ubicaron; para retirarlos se procedió a calentar un cutter y pasarlo por las lineas sobre las que se unen las dos piezas. Se diseño un programa para mover en dos posiciones el eje del servomotor | 3 Horas | 9 TS |
| Martes 25 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastián Ramírez | Trabajo con la prótesis desarrollada el semestre anterior, selección de componentes en estado para continuar con el proyecto de este semestre. Reunión para la toma de decisiones de diseños y componentes electrónicos | 6 Horas | 18 TS |
| Lunes 24 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastián Ramírez | Documentación de los posibles diseños, selección de la metodología y ponderación de la estética del antebrazo | 6 Horas | 18 TS |
| Viernes 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastián Ramírez | Búsqueda de variables y prototipos para el diseño final | 5 Horas | 15 TS |
| Jueves 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastián Ramírez | Visita al taller y planteamiento de objetivos | 4 Horas | 12 TS |
| Miércoles 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| Sebastián Ramírez | contextualización del proyecto y del paciente | 4 Horas | 12 TS |
Mayo 2020
| Miercoles 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Documentación en la WIKI | 4 Horas | 12 TS |
| Valentina Osorio | Documentación en la WIKI | 4 Horas | 12 TS |
| Martes 26 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Entrega de la protesis | 4 Horas | 12 TS |
| Valentina Osorio | Entrega de la protesis | 4 Horas | 12 TS |
| Johan García | Entrega de la protesis | 6 Horas | 18 TS |
| Viernes 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Pruebas de ensamble final electronica + Mecanica | 4 Horas | 12 TS |
| Valentina Osorio | Pruebas de ensamble final electronica + Mecanica | 4 Horas | 12 TS |
| Jueves 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| Johan García | impresion de piezas | 6 Horas | 18 TS |
| Valentina Osorio | ensamble mecánico y electrónico, pruebas | 4 Horas | 12 TS |
| Miercoles 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Acople socket con el codo y exportar diseños stl | 4 Horas | 12 TS |
| Martes 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Osorio | ensamble mecánico y electrónico, inicio de pruebas | 8 Horas | 24 TS |
| Julián Medina | Acople socket con el codo y exportar diseños stl | 8 Horas | 24 TS |
| Lunes 18 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Osorio | Ensamble mecánico | 4 Horas | 12 TS |
| Julián Medina | Te diseño del socket | 4 Horas | 12 TS |
| Viernes 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Osorio | Recoger materiales y Ensamble de las impresiones | 4 Horas | 12 TS |
| Julián Medina | Pruebas de la programación final | 4 Horas | 12 TS |
| Jueves 14 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Osorio | Conexiones y acople de los materiales electronicos en proteus, como diseño electronico | 4 Horas | 12 TS |
| Johan García | Impresión dedos | 4 Horas | 12 TS |
| Miercoles 13 | Descripción | Tiempo | TS |
|---|---|---|---|
| Johan García | Impresión mano | 2 Horas | 6 TS |
| Julián Medina | Pruebas de programación con los motores DC y los servomotores | 4 Horas | 12 TS |
| Martes 12 | Descripción | Tiempo | TS |
|---|---|---|---|
| Johan García | Impresión de Antebrazo | 2 Horas | 6 TS |
| Valentina Osorio | Conexiones del motor DC con los pulsadores, los servomotores con los switch, puente H y pruebas de conexiones | 8 Horas | 24 TS |
| Julián Medina | Programación de los motor dc con la fuente de poder, los pulsadores y los switch con los servomotores | 8 Horas | 24 TS |
| Lunes 11 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Osorio | Pruebas de los materiales, servomotores | 4 Horas | 12 TS |
| Julián Medina | Programación de los servomotor con la fuente de poder y los switch | 4 Horas | 12 TS |
| Johan García | Impresión de Antebrazo | 2 Horas | 6 TS |
| Viernes 8 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Osorio | Recepción de materiales y cambios de switch | 4 Horas | 12 TS |
| Julián Medina | Programación del motor con los pulsadores | 4 Horas | 12 TS |
| Miercoles 6 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Osorio | Insumos, adquisición de los materiales por medio de compra por internet y presencial | 4 Horas | 12 TS |
| Julián Medina | Diseño del motor Gw con el diseño del codo | 4 Horas | 12 TS |
| Martes 5 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Osorio | Cotizaciones de materiales en diferentes tiendas de electrónica | 8 Horas | 24 TS |
| Julián Medina | ajuste al diseño del brazo y antebrazo con el codo | 8 Horas | 24 TS |
| Lunes 4 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Osorio | Recoger materiales impresos, aclarar dudas y busqueda de materiales electronicos | 4 Horas | 12 TS |
| Julián Medina | ajuste al diseño del brazo y antebrazo con la mano | 4 Horas | 12 TS |
Abril 2020
| Jueves 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Osorio | Modelado del socket | 4 Horas | 12 TS |
| Miercoles 29 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Modelado del antebrazo con los motores | 4 Horas | 12 TS |
| Martes 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Diseño del antebrazo con acoples y dimensionamiento para su impresión | 6 Horas | 18 TS |
| Valentina Osorio | Conexiones del servomotor al arduino nano y caracterización del motor | 6 Horas | 18 TS |
| Lunes 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Re diseño del antebrazo, disminuyendo su densidad e Identificacióndel motor encontrado en la fundación para su posterior uso | 4 Horas | 12 TS |
| Valentina Osorio | Identificación, revisiones bibliográficas y caracterización del motor encontrado en la fundación para su posterior uso | 4 Horas | 12 TS |
| Viernes 24 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Diseño y acople del motor respecto al antebrazo | 4 Horas | 12 TS |
| Jueves 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Osorio | Cotizaciones del motor, identificar la posición adecuada del antebrazo con el motor | 4 Horas | 12 TS |
| Miercoles 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Modelado del nuevo motor que se va a usar en la parte del codo para posterior ajuste. | 4 Horas | 12 TS |
| Martes 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Osorio | Búsqueda de motores e implementación de motorreductor con caja reductora 4632 12V 6RPM 30 kg.cm | 8 Horas | 24 TS |
| Julián Medina | Re diseño de socket con sujetadores desde el hombro para prevenir la caída del mismo en el usuario (se piensa sujetar con velcro) | 8 Horas | 24 TS |
| Lunes 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Osorio | Búsqueda de motores propuestos anteriormente para su compra y manera de suplir el mismo con nuevos elementos | 4 Horas | 12 TS |
| Julián Medina | Revisión bibliografica de conexiones y ajuste al diseño del brazo y antebrazo | 4 Horas | 12 TS |
| Viernes 17 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Osorio | Búsqueda de motores e implementaciones en prótesis para codos como plan de contingencia si no es posible la adquisición o el manejo adecuado de los motores propuestos anteriormente, además se realiza cotizaciones sobre el investigado | 4 Horas | 12 TS |
| Julián Medina | Busqueda de motor propuesto con sus respectivas conexiones y motor sugerido, busqueda de motores implementados en protesis para el codo | 4 Horas | 12 TS |
| Jueves 16 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Osorio | Retroalimentación de motor propuesto y motor sugerido, búsqueda de conexiones y distribuidores para el mismo | 4 Horas | 12 TS |
| Miercoles 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | busquedas bibliográficas de materiales solicitados para la ejecución de la prótesis y análisis de conexiones internas | 4 Horas | 12 TS |
| Martes 14 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Ajuste del socket desde el codo hasta el hombro siguiendo las medidas anexadas en la wiki, posterior a la conferencia con el jefe inmediato, se procede a realizar busquedas bibliográficas de materiales solicitados para la ejecución de la prótesis y análisis de conexiones internas | 7:40 Horas | 23 TS |
| Valentina Osorio | Revisiones bibliográficas de conexiones electrónicas a partir de los materiales mencionados anteriormente, ajuste de la wiki en cuanto a coherencia, ortografía, procedimiento, complemento y ajuste fotográfico. Ideas para conexiones internas | 7:40 Horas | 23 TS |
| Jueves 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Osorio | Correcciones y documentación en la WIKI | 3 Horas | 9 TS |
| Miercoles 8 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Modelamiento del socket para ajuste | 4 Hora | 12 TS |
| Martes 7 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | re diseño del modelo cotizaciones y busqueda de proveedores. | 4 Hora | 12 TS |
| Valentina Osorio | Matrices de decisión de materiales y cotizaciones | 4 Horas | 12 TS |
| Lunes 6 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Corrección y re diseño del modelo. | 4 Hora | 12 TS |
| Valentina Osorio | Identificación de materiales a usar y cotización. | 4 Horas | 12 TS |
| Viernes 3 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Creacion de plantilla de referencia para la protesis en el programa, actualizacion de las diferentes partes de la protesis en la wiki. | 4 Hora | 12 TS |
| Jueves 2 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Reunion virtual para analisis del estado del proyecto | 1 Hora | 3 TS |
| Valentina Osorio | Reunion virtual para analisis del estado del proyecto | 1 Hora | 3 TS |
| Julián Medina | Reunion virtual para analisis del estado del proyecto | 1 Hora | 3 TS |
Marzo 2020
| Viernes 20 | Descripción | Tiempo | TS | |
|---|---|---|---|---|
| Valentina Osorio | Diseño del modelo de acuerdo a la escala real en mm y documentacion en la wiki de la prótesis | 4 Horas | 12 TS | |
| Julián Medina | Planos de cada una de las piezas del modelo con sus debidas cotas | 4 Horas | 12 TS |
| Jueves 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Osorio | Subir los modelos correspondientes de la prótesis de Matías (manos, codo, acople) a la plataforma thingenverse para su posterior descarga y documentacion en la wiki de la prótesis | 4 Horas | 12 TS |
| Miercoles 18 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Ensamble de los componentes en la simulación(codo, antebrazo, mano) Documentacion en la wiki de la protesis | 4 Horas | 12 TS |
| Martes 17 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Pruebas y simulación de la conexión motor sg90 con arduino uno, para el movimiento de la mano | 7 Horas | 21 TS |
| Valentina Osorio | Revisión del desarrollo de la prótesis de Matias, acople de medidas acordadas según la wiki(previas) | 7 Horas | 21 TS |
| Lunes 16 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Documentación en la wiki “segunda prótesis para Matías” | 4 Horas | 12 TS |
| Valentina Osorio | Documentación en la wiki “segunda prótesis para Matías | 4 Horas | 12 TS |
| Viernes 13 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Caracteristicas y modelado del motor sg90 | 4 Horas | 12 TS |
| Jueves 12 | Descripción | Tiempo | TS |
|---|---|---|---|
| Valentina Osorio | Caracteristicas del motor daiichi y modelado del motor | 3 Horas | 9 TS |
| Miercoles 11 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Modelado del socket y ajuste del antebrazo para acople de motores | 4 Horas | 12 TS |
| Martes 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Modelado del antebrazo y acople con el diseño del codo | 3 Horas 40 min | 11 TS |
| Valentina Osorio | Modelado antebrazo, organizar plataforma y subir diseños | 3 Horas 40 min | 11 TS |
| Lunes 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Modelado del codo para acople con el motor | 4 Horas | 12 TS |
| Valentina Osorio | Busqueda y caracterizaciòn del posible motor a usar para acople con el motor | 4 Horas | 12 TS |
| Viernes 06 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Modelado del antebrazo para acople de motores y ajuste de la muñeca, actualización de datos con respecto a la prótesis y modelos | 4 Horas | 12 TS |
| Miercoles 04 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Modelado del codo para acople de motor. | 4 Horas | 12 TS |
| Martes 3 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Modelado de la extremidad, acople hombre y placa | 5 Horas | 15 TS |
| Valentina Osorio | Modelado de la extremidad y acople motores | 4 Horas | 12 TS |
| Maria Jose | Modelado de la extremidad | 3 Horas | 9 TS |
| Lunes 2 | Descripción | Tiempo | TS |
|---|---|---|---|
| Julián Medina | Modelado de la extremidad y el ajuste del codo | 4 Horas | 12 TS |
| Valentina Osorio | Modelado de la extremidad y el ajuste del codo | 4 Horas | 12 TS |
Febrero 2020
Reportes y TS
| Miercoles 26 | Descripción | Tiempo | TS |
|---|---|---|---|
| Manuela Mora | Modelado de la extremidad y el ajuste del codo | 4 Horas | 12 TS |
| Julián Medina | Modelado de la extremidad y el ajuste del codo | 4 Horas | 12 TS |
Diciembre 2019
Reportes y TS
| Martes 3 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Ajustes finales prótesis | 3 Horas | 9 TS |
| Juan Manuel Vargas | Ajustes finales prótesis | 3 Horas | 9 TS |
Noviembre 2019
Reportes y TS
| Martes 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Re impresión pieza de la mano | 3 Horas | 9 TS |
| Viernes 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Arreglo estético de la mano | 6 Horas | 18 TS |
| Jefersson Hernandez | Adecuación electrónica (regulador voltaje) | 6 Horas | 18 TS |
| Miercoles 13 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Union de piezas mano mediante cañamo | 6 Horas | 18 TS |
| Jefersson Hernandez | Adecuacion electronica (regulador voltaje) | 6 Horas | 18 TS |
| Martes 12 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Pulir y lijar piezas de la mano dedos | 6 Horas | 18 TS |
| Jefersson Hernandez | Pulir y lijar la muñeca, adecuación de baterías | 6 Horas | 18 TS |
| Jueves 7 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión de dedos y uniones dedos | 4 Horas | 12 TS |
| Miercoles 6 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jefersson Hernandez | Modificación muñeca e impresión muñeca | 7 Horas | 21 TS |
| Luna León | Modificaciones de mano | 7 Horas | 21 TS |
| Mario | Clasificación de señales y redes neuronales | 2 horas | 6 TS |
| martes 5 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión piezas de la mano | 5 Horas | 15 TS |
| Viernes 01 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jefersson Hernandez | Modificaciones diseño de muñeca, ya que la realizada presentaba complicaciones | 5 Horas | 15 TS |
Octubre 2019
Reportes y TS
| Miercoles 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jefersson Hernandez | Modificaciones en piñones y parte mecánica del antebrazo e impresión piezas de la mano | 8 Horas | 24 TS |
| Luna León | Impresión piezas de la mano | 6 Horas | 18 TS |
| Lunes 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión piezas de la mano | 5 Horas | 15 TS |
| Miércoles 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión dedos de la mano | 4 Horas | 12 TS |
| Jefersson Hernandez | Adecuación piñones y reimpresión de pieza centro de antebrazo | 6 Horas | 18 TS |
| Martes 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión dedos de la mano | 4 Horas | 12 TS |
| Jefersson Hernandez | Adecuación piñones y reimpresión de pieza centro de antebrazo | 5 Horas | 15 TS |
| Viernes 18 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión dedos de la mano | 4 Horas | 12 TS |
| Jueves 17 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jefersson Hernandez | Impresión pieza centro del antebrazo, mejoramiento piezas impresas y adecuacion de motores y piñones | 6 Horas | 18 TS |
| Miercoles 16 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión piezas mano | 4 Horas | 12 TS |
| Jefersson Hernandez | Impresión segunda parte antebrazo, mantenimiento y mejoramiento de la impresion | 6 Horas | 18 TS |
| Martes 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión piezas mano (falanges) | 4 Horas | 12 TS |
| Viernes 11 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión piezas mano | 4 Horas | 12 TS |
| Jueves 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión piezas mano | 4 Horas | 12 TS |
| Lunes 07 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión piezas mano | 4 Horas | 12 TS |
| Viernes 04 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión piezas antebrazo | 4 Horas | 12 TS |
| Jueves 03 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jefersson Hernandez | Modificaciones y ajustes finales del antebrazo | 6 Horas | 18 TS |
| Luna León | Modificación final de la mano | 6 Horas | 18 TS |
| Miércoles 02 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jefersson Hernandez | Modificación y ajuste de antebrazo | 6 Horas | 18 TS |
| Luna León | Modificación de la mano | 6 Horas | 18 TS |
| Martes 01 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jefersson Hernandez | Finalizacion de modificacion y ajuste de muñeca a la prótesis e impresión del antebrazo | 6 Horas | 18 TS |
| Luna León | Modificación de la mano | 6 Horas | 18 TS |
Septiembre 2019
Reportes y TS
| Lunes 30 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jefersson Hernandez | Finalizacion de modificacion y ajuste de muñeca a la prótesis e intento de impresión del antebrazo | 6 Horas | 18 TS |
| Luna León | Modificación de la mano e intento de impresión del antebrazo | 6 Horas | 18 TS |
| Viernes 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jefersson Hernandez | Finalizacion de modificacion y ajuste de muñeca a la protesis te antebrazo e integracion de tematica a la protesis | 5 Horas | 15 TS |
comentarios: marcar a Julian pa definir un dia entre semana, proxima semana para una primera entrega el 3 de octubre si se puede.
| Miércoles 25 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión del socket | 3 Horas | 9 TS |
| Martes 24 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Modificación de socket e impresión de piezas del mismo | 6 Horas | 18 TS |
| Jeff | Modificación de muñeca para acople con antebrazo, modificación de antebrazo para ubicacion de segunda bateria | 6 Horas | 18 TS |
| Lunes 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Modificación de socket e impresión de piezas del mismo | 6 Horas | 18 TS |
| Viernes 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff | Intento de impresión del socket, no se pudo ya que no se logró arreglar un problema de impresión | 3 Horas | 9 TS |
| Jueves 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Modificaciones del diseño de la mano | 6 Horas | 18 TS |
| Jeff | Diseño de piezas para el posicionamiento de actuadores y diseño de muñeca | 6 Horas | 18 TS |
| Miércoles 18 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Definición de actuadores. Rediseño y ajuste del socket para una mejor funcionalidad | 6 Horas | 18 TS |
| Jeff | Impresión de pieza del antebrazo. Diseño de piezas para el posicionamiento de actuadores | 6 Horas | 18 TS |
| Martes 17 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Rediseño y ajuste del socket para una mejor funcionalidad | 6 Horas | 18 TS |
| Jeff | Últimos arreglos del diseño del antebrazo y diseño de piezas para el posicionamiento de actuadores | 6 Horas | 18 TS |
| Lunes 16 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Impresión de pieza preeliminar del socket | 6 Horas | 18 TS |
| Jeff | Últimos arreglos del diseño del antebrazo | 6 Horas | 18 TS |
| Sábado 14 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Esperando la cita con Julian al lab para escanear a Matias | 2 Horas | 6 TS |
| DIego Chacón | Escaner de Matias Días después | 2 Horas | 6 TS |
Comentarios: marcar a Julian pa definir un dia entre semana, hasta tarde para una primera entrega antes el 28 de septiembre. Julian propone el jueves 26 en la noche.
| Jueves 12 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff | Modificacion preeliminar de mano | 6 Horas | 18 TS |
| Luna León | Modificacion preeliminar de mano | 6 Horas | 18 TS |
| Martes 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff | Realización de Perforaciones para adecuación de la pieza de soporte para el servomotor | 3 Horas | 9 TS |
| Luna León | Rediseño de las piezas de unión del socket al antebrazo | 3 Horas | 9 TS |
| Lunes 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff | Realización de Perforaciones para adecuación de la pieza de soporte para el servomotor | 6 Horas | 18 TS |
| Luna León | Rediseño de las piezas de unión del socket al antebrazo | 6 Horas | 18 TS |
| Jueves 5 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff | Realización de Perforaciones para adecuación de servomotor, junto con sus tornillos y tuercas; se realiza la adecuación del eje de movimiento de la prótesis | 6 Horas | 18 TS |
| Miercoles 4 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff y Luna León | Modificacion de socket para unirlo con el antebrazo | 6 Horas | 18 TS |
| Martes 3 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff y Luna León | Adecuación servomotor y batería prótesis antebrazo en modelo de fussion 360 | 6 Horas | 18 TS |
| Lunes 2 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff | Pruebas adquisición de la señal mediante circuito propuesto en ("Real-Time Pattern Recognition for prosthetic hand") por mabloc | 4 Horas | 12 TS |
| Luna León | Pruebas adquisición de la señal mediante circuito propuesto en ( "Real-Time Pattern Recognition for prosthetic hand") por mabloc | 6 Horas | 18 TS |
| mabloc | Pruebas adquisición de la señal mediante circuito propuesto en ("Real-Time Pattern Recognition for prosthetic hand") por mabloc | 6 Horas | 18 TS |

Pruebas circuito de adquisición utilizado en ("Real-Time Pattern Recognition for prosthetic hand") por mabloc

Agosto 2019
Reportes y TS
| Jueves 29 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff | Modelamiento antebrazo prótesis | 6 Horas | 18 TS |
| Luna León | Modelamiento socket | 3 Horas | 9 TS |
| Miércoles 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff y Luna León | Modelamiento socket y antebrazo prótesis | 3 Horas | 9 TS |
| Luna León mabloc | Investigación y charla sobre el trabajo de Mario a cerca de la caracterización de señales EMG para una posible implementación en la prótesis | 3 Horas | 9 TS |
| Martes 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| Jeff y Luna León | Comienzo del modelamiento de prótesis | 3 Horas | 9 TS |
| viernes 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Investigación sobre el tipo de socket adecuado para Matias | 3h | 9 TS |
TODO: Se realizo investigación acerca del modelo de socket mas apropiado para Matias dependiendo su tipo de amputación; todo esto con el fin de dar inicio a el modelado de la protesis
| jueves 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| Luna León | Lectura articulo de clasificación de señales de EMG de Matias, identificación de parámetros y metodología utilizada | 3h | 9 TS |
| Jefferson Hernández | Lectura articulo de clasificación de señales de EMG de Matias, identificación de paramatros y metodologia utilizada | 3h | 9 TS |
TODO: Se realizo la lectura del articulo "Real-Time Pattern Recognition for prosthetic hand" de Mario A. Benitez (mabloc), para identificar metodologías parámetros, características, tipos de movimiento y red neuronal utilizada para la calificación de movimientos a partir de señales de EMG
| miercoles 21 | Descripción | Tiempo | TS
|
|---|---|---|---|
| Jefferson Hernández | Contacto con Mario A. Benitez- (mabloc) (autor articulo "Real-Time Pattern Recognition for prosthetic hand") | 3h | 9 TS |
TODO: Se realizo el contacto con Mario A. Benitez, para obtencion de informacion acerca de la calsificacion se señales de EMG de matias
| Sabado 10 | Descripción | Tiempo | TS
|
|---|---|---|---|
| Fabian Bustos | Asistencia a evaluación de Matías | 3h | 9 TS |
| PI RAT | Asistencia a evaluación de Matías | 3h | 9 TS |
| Diego Chacon | Asistencia a evaluación de Matías | 3h | 9 TS |
TODO: Se empezara el proceso de diseño de la protesis
abril 2019
Fisioterapia:
- Lorena13
- Horas: dos
- Fecha: 13 de abril 2019
- validado el ? abril 2019
Psycologia:
- Andres?
- Horas: dos
- Fecha: 13 de abril 2019
- validado el ? abril 2019
Ingeneria:
- Juan Manuel Vargas
- Horas: 3
- Fecha: 13 de abril 2019
- validado el ? abril 2019