Difference between revisions of "Prótesis mano Andres Felipe"
(→Diseño y planos) |
(→Febrero 2020) |
||
| Line 137: | Line 137: | ||
|- | |- | ||
| [https://es.utopiamaker.com/m3duto/user:162755 Felipe Gomez Jasbon] || Modelado antebrazo || 4 Horas || 12 TS | | [https://es.utopiamaker.com/m3duto/user:162755 Felipe Gomez Jasbon] || Modelado antebrazo || 4 Horas || 12 TS | ||
| + | |- | ||
| + | |[https://es.utopiamaker.com/m3duto/user:929604 Sergio Quintero] || Modelado antebrazo || 2 Horas || 6 TS | ||
|} | |} | ||
| − | |||
=== Enero 2020 === | === Enero 2020 === | ||
Revision as of 23:01, 8 February 2020
Contents
Jefe de proyecto
| Profile | Photo |
|---|---|
| Andres Felipe fuentes |

Presentacion
Este proyecto tiene como objetivo principal, diseñar y construir una prótesis mioeléctrica para el joven Andrés Felipe de 22 años quien presenta una anomalía congénita en su brazo derecho, lo cual limita algunos de los movimientos generados por la cadena muscular anterior del brazo. En particular, se ve limitado el movimiento de pronación y supinación del antebrazo, así como el rango de movilidad del dedo pulgar y la muñeca. Es importante resaltar que el dedo pulgar es el único dedo presente en la mano, sin embargo, junto con Andrés Felipe se decidió diseñar una prótesis que tenga todos los dedos de la mano.
Desarrolladores
| Maker | Foto |
|---|---|
| Sergio Quintero |

| Maker | Foto |
|---|---|
| Felipe Gomez Jasbon |
| Maker | Foto |
|---|---|
| Alex |
Recursos
Los recursos humanos y materiales necesarios para el diseño y construcción de la prótesis son:
- Estudiante de Ingeniería Mecatrónica 4 horas x semana
- Estudiante de Ingeniería Mecánica 4 horas x semana
- Estudiante de Ingeniería Electrónica 4 horas x semana
Materiales:
- TPU
- PLA
- Software de diseño "Inventor"
- Cañamo
- Servomotores
- Sensor mioeléctrico
- Componentes electrónicos básicos
- Baterías de litio
Diseño y planos
- El primer prototipo se basó en el diseño presentado a continuación: https://www.thingiverse.com/thing:3866684
- El segundo prototipo es un diseño nuevo el cual se puede encontrar en:
Equipo
| Profile | Photo |
|---|---|
| Serguio Quintero |
Etapas
Evaluación Antropométrica
Se llevó a cabo la toma de medidas del beneficiario; en este procedimiento se tomaron tanto medidas directas (Por medio del formato) como indirectas (Por medio de fotografías y scanner 3D).

medidas fisicas

Vista frontal

Vista Superior

Escaneo 3D

Escaneo en STL

formato






Diseño de la prótesis
Inicialmente se había planteado realizar un prótesis mecánica; pero un compañero de la fundación nos indicó que la movilidad de la muñeca era muy reducida como para poder utilizar correctamente éste tipo de prótesis; el tema se trató con 3 fisioterapeutas de la Universidad Nacional, las cuales dieron su concepto y estuvieron de acuerdo con que era mejor el desarrollo de una prótesis mecánica.
Para el diseño de la prótesis, se utilizó el software Autodesk Inventor y empleando el archivo del scanner 3d, logramos verificar que las dimensiones de la prótesis con correctas, ya que la extremidad del beneficiario alcanza a entrar en su prótesis.

Vista previa de protesis

Simulación para ajuste ergonómico


Sistema Mecánico
13/11/2019
Esta prótesis utilizara actuadores tipo servo de los utilizados en autos de RC, estos motores flexionaran los dedos por medio de hilos que se enrollan sobre poleas cuando los motores se activan, el movimiento de los dedos se reduce a un desplazamiento lineal menor a 4cm de longitud en los hilos, que es el rango entre dedos extendidos y completamente contraidos, al utilizar motores de este tipo se debe diseñar una polea compatible con el mismo teniendo en cuenta que la mitad de la circunferencia sea igual al desplazamiento del dedo, esto se debe a que el servo tiene un giro controlable de 0 a 180 grados como se muestra en la siguiente imagen.
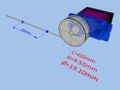
Diseño de polea

Sistema Electrónico
13/11/2019
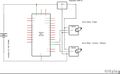
Esta prótesis es mioeléctrica esto significa que utiliza los biopotenciales generados por la actividad muscular de la extremidad para activar motores que ejecutan movimientos en la prótesis, se utiliza un sensor electromiografico Myoware que amplifica y entrega filtrada la señal electromiografica del musculo donde este se posiciona, esta señal puede ser muestreada analogamente por un microcontrolador Arduino Nano con resolucion de 8 bit (1023 muestras), con este rango de sensibilidad podemos utilizar filtros de nivel de señal para controlar y posicionar los servos SG90.
En la primera imagen de esta etapa se pueden apreciar los componentes necesarios para construir el circuito electrónico (segunda imagen), en la tercera encontramos el pinout del sensor que se conecta al pin A0 del arduino como se muestra en la imagen 4, Se debe tener en cuenta que la posicion del sensor sobre el musculo puede cambiar la señal por lo que se recomienda al beneficiario conservar siempre la misma posición (imagen 5) para que la prótesis trabaje de manera normal. En la imagen 5 se muestra el diagrama de flujo del programa utilizado en el Arduino Nano, el programa basicamente toma datos de un pin análogo y ejecuta diferentes movimientos en los motores dependiendo del nivel de señal de entrada, en el siguiente link se encuentra el codigo base para que el circuito controle dos servos con la señal de un sensor.
Codigo para Arduino Nano: Código Protesis Andres Felipe

Componentes Electrónicos
Circuito Electrónico

Pinout Sensor Myoware

Conexión Myoware-Arduino

Posicion de Electrodos

Diagrama de Flujo programa






Impresión 3D
PostProceso y Ensamble
Reportes y TS
Febrero 2020
| Sábado 8 de Febrero | Descripción | Tiempo | TS |
|---|---|---|---|
| Felipe Gomez Jasbon | Modelado antebrazo | 4 Horas | 12 TS |
| Sergio Quintero | Modelado antebrazo | 2 Horas | 6 TS |
Enero 2020
| Martes 28 de Enero | Descripción | Tiempo | TS |
|---|---|---|---|
| Sergio Quintero | Presentación primer prototipo, segunda toma de medidas y escaneo 3D | 1 Horas | 3 TS |
| Sabado 25 de Enero | Descripción | Tiempo | TS |
|---|---|---|---|
| Sergio Quintero | Presentación proyecto nuevos miembros y finalización ensamble primer prototipo | 4 Horas | 12 TS |
| Felipe Gomez Jasbon | Finalización ensamble primer prototipo | 3 Horas | 9 TS |
| Alex | Finalización ensamble primer prototipo | 3 Horas | 9 TS |
Diciembre 2019
| Miércoles 18 de Diciembre | Descripción | Tiempo | TS |
|---|---|---|---|
| Sergio Quintero | Electrónica y ensamble | 4 Horas | 12 TS |
| Miércoles 11 de Diciembre | Descripción | Tiempo | TS |
|---|---|---|---|
| Sergio Quintero | Modelado, impresión electrónica | 4 Horas | 12 TS |
| Martes 10 de Diciembre | Descripción | Tiempo | TS |
|---|---|---|---|
| Sergio Quintero | Modelado, impresión electrónica | 4 Horas | 12 TS |
Noviembre 2019
| Jueves 14 de Noviembre | Descripción | Tiempo | TS |
|---|---|---|---|
| Sergio Quintero | Impresión y ensamble prótesis - Evento city | 7 Horas | 21 TS |
| Miercoles 13 de Noviembre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Documentación Sistema Mecánico y Sistema Electrónico | 6 Horas | 18TS |
| Sergio Quintero | Impresión y ensamble prótesis | 8 Horas | 24 TS |
| Viernes 8 de Noviembre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Taller de construcción de protesis con estudiantes de la U Católica | 2 Horas | 6 TS |
Septiembre 2019
| lunes 9 de septiembre | Descripción | Tiempo | TS |
|---|---|---|---|
| defigueredor | xxxxxxxxxxxxxxxxxxxxxxx | x Horas | x TS |
Agosto 2019
| viernes 30 de agosto | Descripción | Tiempo | TS |
|---|---|---|---|
| miguel duran | ayudar a las tomas de medidas | 3 Horas | 9 TS |
| luna | ayudar a las tomas de medidas | x Horas | x TS |
| jeff | ayudar a las tomas de medidas | x Horas | x TS |