Difference between revisions of "Protesis Erika Garcia"
(→Evaluación Antropométrica) |
(→Evaluación Antropométrica) |
||
| Line 29: | Line 29: | ||
</gallery> | </gallery> | ||
| − | Molde extremidad frontal.jpg| Molde extremidad frontal | + | Molde extremidad frontal.jpg|Molde extremidad frontal |
| − | Molde extremidad bilateral.jpg |Molde extremidad bilateral | + | Molde extremidad bilateral.jpg|Molde extremidad bilateral |
</gallery> | </gallery> | ||
Revision as of 00:32, 11 September 2021
Contents
Jefe de proyecto
| Maker | Image | Profile |
|---|---|---|
| Erika García |

Objetivos

- El presente proyecto se enfoca en realizar una prótesis de miembro superior trans-radial (a nivel medio del antebrazo)para la beneficiaria Erika García Bolivar de 23 años, habita en la ciudad de Medellín, en la entrevista ella expresa su necesidad de una mano fuerte y que le genere confianza a la hora de tomar objetos de peso mediano, entre los usos cotidianos que podría tener la prótesis se contempla el uso de la bicicleta por lo que un análisis y una elección de los materiales apropiados debe hacerse.
- Se deben utilizar motores DC con caja reductora, que no superen un voltaje de trabajo de 24v, que proporcionen una respuesta rápida para ejecutar tareas de manera mas natural en las partes móviles, se utilizara una tarjeta electrónica programable que recibirá señales del usuario y controlara los motores de manera proporcional al estimulo recibido por el sensor muscular y un botón selector que se activará con un movimiento específico del usuario.
Evaluación Antropométrica
10/09/2021
Con la ayuda de un dispositivo scanner 3D (Kinect) se ha digitalizado la muestra de la extremidad tomada en yeso, se editó la malla resultante del scan con el software ZBrush y fotografías de referencia, para lograr una representación tridimensional aproximada de la extremidad, este será la parte principal sobre la que se construye la prótesis propuesta.
</gallery>
Molde extremidad frontal.jpg|Molde extremidad frontal Molde extremidad bilateral.jpg|Molde extremidad bilateral
</gallery>
Diseño de Prótesis e Impresión 3D
10/09/2021
Se ha iniciado el proceso de diseño de la mano mecánica teniendo en cuenta los requerimientos del usuario. Los materiales de la mano mecánica deben soportar esfuerzos considerables debido a la actividad relacionada con el uso de la bicicleta, por lo cual se ha decidido construir un prototipo de una mano con piezas metálicas y polímeros de alta resistencia para mantener un agarre fuerte y seguro de los objetos. En esta parte de la prótesis se utiliza la impresión 3D solamente como método de prototipado mas no como el producto final.
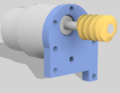
Con respecto al actuador a cargo del movimiento de la muñeca, se ha encontrado una compatibilidad entre un motor DC de alto torque (37GB) y el prototipo de la mano existente, se logra esto por medio de una transmisión tipo worm gear que toma la fuerza torsional del motor y lo transmite directamente al mecanismo.

Diseño Inicial de Mano Mecánica

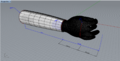
Ensamble Motor Mano

Render con Simulación de Texturas

Transmisión Tipo Worm Gear
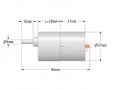
Motor con Caja Reductora 12V

Motor 37GB

Ensamble Motor-Transmisión





_37mm_Low_RPM_DC_Geared_Motor_with_gearbox_12VDC_200RPM_37GB.png)

10/09/2021
Para el modelado 3D se utilizaron los programas Fusion 360, Rhinoceros 6 y ZBrush 4R8 para la modificación de piezas existentes y la generación de nuevos complementos para el prototipo. El mecanismo original se compone de los dedos pulgar, índice y medio, los cuales se utilizan para hacer el movimiento de agarre necesario para montar en bicicleta, este modelo se modifico para que tuviera un mejor agarre colocándole un motor al mecanismo. Este prototipo va cubierto por un diseño de una mano elástica como se evidencia en las imágenes, es importante mencionar que esta mano tiene los dedos anular y meñique rígidos para un mejor movimiento de agarre.

Guante estético


Modelo 3D

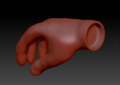

Modelo de la mano con el diseño mecánico

Modelo de la mano







10/09/2021
Se ha realizado una representación tridimensional de las medidas reales del caso en software de modelado 3D (Rhinoceros 5), con este archivo podemos realizar los ensambles y simulaciones necesarias para lograr unas dimensiones y volúmenes en las piezas finales que concuerden con la constitución real del usuario, esta etapa es la mas importante y vital para la planeación y la obtención de modelos de producción en las máquinas.

Visualización de medidas

Análisis Mecánico
10/09/2021
Después de realizar el montaje de la mano con el motor se han realizando las pruebas de de desempeño del ensamble, con respecto a la fuerza de agarre se evidencia una presión considerable en la pinza. Se encuentra un problema en cuanto al tamaño del piñon , ya que afecta la velocidad de ejecución y por ende el carácter mecánico/eléctrico del prototipo, por lo cual, se decidió reducir el piñón de 45 mm a 30 mm de diámetro y de esta forma disminuir la velocidad de ejecución con el fin de tener un mejor agarre, es importante tener en cuenta que esta modificación requiere un mayor voltaje el mecanismo.
Debido a este ajuste se realizaron diferentes modificaciones en el prototipo, por ejemplo, la pieza soporte se tuvo que reducir y además posicionar de una manera diferente algunos huecos de los tornillos como se evidencia en las imágenes, de esta forma el motor se acomodo a una altura más baja ocupando menos espacio en el guante elástico.
Ensamble Motor-Transmisión

Mecanismo ottobock diseñado en Fusion 360 y Rhinoceros
Prototipo del soporte de la muñeca



Mecanismo ottobock

Mecanismo ottobock de ejemplo


Soporte muñeca

Diferentes soportes de muñeca

Anillo de unión entre el mecanismo y el brazo






Analisis Electrónico
10/09/2021
La prótesis utiliza dos motores DC reductores, asignados a las funciones de flexión / extensión de codo y apertura /cierre de la mano, cada motor va controlado por un puente h y un sensor de posición, los mecanismos de entrada para control de usuario se componen de un botón selector de diferentes modos o actuadores y de un sensor de actividad muscular, en un primer modo de selección, el motor seleccionado será el del codo y ejecutará un movimiento proporcional a la actividad muscular de la extremidad, en el rango que va desde la posición de brazo extendido hasta una flexión de 90 grados, al presionar de nuevo el botón selector el control apuntará hacia el motor de la mano, de igual manera proporcional a la actividad muscular de la extremidad.