Exoesqueleto Julian
Jefe de proyecto
| Maker | Image | Profile |
|---|---|---|
| Castillo Angela |

Presentacion


Julian Castillo es un niño de 11 años y habita en la ciudad de Bogota, en el pasado ha sido beneficiario de la fundación con una protesis mecanica personalizada con motivo del superheroe Batman, ha utilizado tambien un exoesqueleto desarrollado por su tía Angela en compañía de la fundación M3D.
En este proyecto se desarrollará una prótesis mioeléctrica para su brazo derecho, la cual le servirá para mejorar su movilidad y será la plataforma de entrenamiento para futuras prótesis mas avanzadas.
Objetivo
Este proyecto es un proyecto de vida para Julian. Vamos a documentar aquí todos los modelos de prótesis que va a recibir a lo largo de su vida, tratando de tener para él siempre los mejores avances de la tecnología, para que el uso de la prótesis pueda ser cada vez más útil para él.
Calibración y Entrega
El sabado 26 de Octubre de 2019 se ha tenido un encuentro con Angela y su sobrino Julián con motivo de revisar el ajuste de la prótesis y verificar que las medidas sean correctas, durante las pruebas de agarre ha fallado un sensor de posición en los motores el cual sera reemplazado el dia Lunes 28 de Octubre, asi la prótesis será lista para entregar.

Prueba de prótesis




El Sabado 2 de Noviembre de 2019 se ha realizado la entrega final de la prótesis de Julian, el ajuste de la prótesis es firme aunque es necesario utilizar una media o material suplementario que evite que la protesis se deslice y pierda su posición, se ha programado el sensor de activación para ejecutar un agarre tipo pinza, el cual es muy util para tomar objetos pequeños, se ha instalado una batería con autonomía de 2 horas de trabajo contínuo, se espera que esta protesis tenga un tiempo de uso no mayor a un año, cuando el beneficiario ya haya crecido y sea necesario fabricar otra.

Pruebas de agarre







Desarrolladores
| Maker | Foto |
|---|---|
| Daniela Arboleda |

| Maker | Foto |
|---|---|
| Bustos Fabian |

Etapas
Evaluación Psicológica
- Julian es un chico muy inteligente y apasionado por los videojuegos, su favorito es Halo y ha elegido al personaje principal del videojuego como inspiración para su nueva prótesis, se espera que la protesis ademas de ser una solución funcional para mejorar la movilidad, sea tambien una herramienta que le de una identidad en el ambiente escolar, personal y familiar.

Personaje de Videojuego Halo

Vista previa de la protesis


Evaluación Antropométrica
El caso de Julian se trata de una simbraquidactilia leve la cual es una malformación congénita, donde los dedos de la mano se desarrollan poco aunque presentan movilidad, esta prótesis sera una extensión de la extremidad, se habilitará una mano flexible con un movimiento de pinza basico inicialmente.

Vista Lateral

Vista Frontal
Medidas Tomadas



Diseño de Extremidad
El modelo tridimensional de la extremidad se realizó en el software FUSION 360 utilizando imagenes de fondo como referencia de la vista frontal y lateral de la extremidad, de este modo se obtuvo una version digitalizada del muñon, con este modelo de base se construye la estructura de la prótesis teniendo en cuenta los volumenes que ocupan los componentes mecánicos y el circuito electrónico dentro de la misma,

Imagen 1. Diseño de la prótesis vista lateral

Imagen 2. Diseño de la prótesis vista lateral


Diseño 3D
Se ha descargado de la pagina Thingiverse un modelo completo del personaje de videojuego Halo escojido por el beneficiario, de este modelo se ha tomado la parte que va desde el codo hasta la muñeca para hacer un bosquejo del resultado final, ya que esta malla basica posee bajo nivel de poligonos y debido a varias modificaciones ha perdido su forma, se ha construido un brazo nuevo con curvas mejor definidas, con los espacios y divisiones pensados para alojar los mecanismos y circuitos funcionales.
- Link Descarga de Modelos 3D: https://www.thingiverse.com/thing:3836088

Imagen 3. Modelo Spartan de videojuego Halo

Imagen 4. Brazo modelo original

Imagen 5. Brazo modelo original

Imagen 6. Palma anterior y nueva prótesis

Imagen 7.Detalles de la mano

Detalle de tapa

Tapa de motor







Diseño Mecánico
Esta protesis sera de algun modo una extensión articulada del brazo, tendra 5 dedos como una mano normal. El movimiento de los dedos se ejecutara por medio de un actuador lineal que se compone de un tornillo impulsado por un micromotor DC de alto torque, este tornillo hace desplazar una pieza metálica que sostiene los hilos hasta los dedos, este mecanismo se ha elegido por su rapida ejecución de movimientos y la fuerza que puede ejercer en los dedos de la mano, lo que puede presentar un agarre y desempeño mejorados, comparado con los servos convencionales que por su diseño y limitaciones mecánicas han sido descartados de este modelo de prótesis.

Brazo Actuador

Brazo Actuador

Diferentes agarres de la mano



En la imagen anterior se pueden observar los diferentes agarres que realiza la mano humana, que son necesarios para desarrollar distintas tareas cotidianas. La prótesis permitirá que el paciente pueda desarrollar estos diferentes movimientos para una mayor comodidad e independencia, estos agarres se ejecutarán mediante diferentes circuitos que se activan en el momento que el beneficiario lo desee.
14/10/2019 Se ha probado el mecanismo mencionado anteriormente para el movimiento de los dedos, presentando como resultado bajo desempeño en fuerza y velocidad de ejecución, debido a esto se utilizaran dos micromotores de alto torque en una posición lineal para ejecutar acciones basicas independientes, el primer motor ejecutara un movimiento entre los dedos indice y pulgar, el segundo motor se encargará de los tres dedos restantes, con esta configuración se pueden obtener posiciones tipo pinza que se utiliza comunmente para tomar pequeños objetos y la posición cylindrical-spherical que se ejecuta con los dos motores y se utiliza para tomar objetos cilíndricos y esféricos como pelotas, se utilizan sensores de corriente para tener en cuenta los limites de torque del motor y asi alargar su vida util.

Nuevo Mecanismo

Micromotor N20










Diseño Electrónico
Teniendo en cuenta que el beneficiario posee movimiento en la muñeca se seleccionó como dispositivo de control de la protesis un sensor resistivo de fuerza que nos da una resolución de 1023 niveles de sensibilidad, utilizando filtros estos niveles se pueden utilizar para multiples movimientos dependiendo de los actuadores y la configuración de estos, inicialmente la prótesis debe abrir y cerrar la mano al poner o quitar la presión del sensor tal como se ha implementado en el proyecto Creating_Protesis_con_rotacion_de_muneca de Miguel Durán.
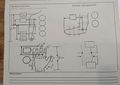
En las siguientes imágenes se puede observar circuito final esquemático y en pcb del prototipo de la mano, esta compuesto por diferentes componentes tales como una galga, Arduino nano, L293D, resistencia de 10k, endsstop que funcionan como un switch, adicionalmente se hace uso de un motor dc.
A lo largo del proceso se decidió realizar el circuito en una pcb ya que de esta forma las conexiones entre los elementos electrónicos es mas segura, ademas de que su tamaño disminuyen gran medida y es de mayor facilidad para adecuarla a la pieza de la prótesis.
Inicialmente se ha probado el control del movimiento del actuador lineal utilizando 2 microswitch como finales de carrera, los cuales en el firmware activan o desactivan el movimiento del motor hasta que sean activados por la pieza movil, la dirección se define por la presión que existe en el sensor, si la señal del control manual supera un umbral definido dentro de los 800 niveles de señal, se conservaran las primeras 200 unidades como zona de seguridad donde el sensor no generara acción alguna, este valor puede variar y puede ser ajustable manualmente desde un trimmer conectado a un pin analogo.
Se utilizara una resistencia conectada como sensor de consumo de corriente en el circuito de control de motores, con la señal de este sensor de corriente sabremos con precision el esfuerzo que hace el motor y los picos de corriente maximos que el motor puede manejar, asi el programa tiene definidos los puntos donde el mecanismo presenta un problema de movimiento y la decisión de seguridad es no permitir movimiento del motor hasta el proximo reset.
La secuencia de inicio del programa toma una evaluación rapida del estado de los sensores y del desempeño del motor, si existe alguna falla se genera un reporte por el puerto serial.

Imagen 11. Circuito esquematico de la protesis de la mano

Imagen 12. Circuito pcb de la protesis de la mano

Imagen 9. Sensor de Fuerza

Imagen 10.Prototipo de Circuito Electrónico




Impresión 3D
En las partes estructurales y funcionales de este modelo de protesis se utilizaran materiales rigidos y flexibles impresos en 3D, para la seccion del brazo y la palma se utilzará plastico PLA impreso con densidad de 40% a una resolución de 0.2mm, en el caso de los dedos se utilizara polimero flexible Ninja Flex que le da a los dedos su propiedad elástica y mejora el agarre de objetos.
La impresión de los polimeros flexibles como TPU, TPE, eFlex, NinjaFlex entre otros requiere un ajuste de la velocidad de impresión, normalmente la velocidad segura de impresión es de 5 a 20 mm/s o la cuarta parte de la velocidad normal con plásticos rígidos como PLA (30-60 mm/s), la temperatura de impresión promedio es de 210 grados, puede variar dependiendo del fabricante.

Imagen 13. Impresión de los dedos

Imagen 14. Impresión de los dedos

Dedos de la mano

Piezas del brazo

Bisagra para tapa

Software de impresion 3D






PostProceso y Ensamble
22/09/2019
Se ha rediseñado el brazo para hacer el ensamble de manera modular, estas piezas se unieron utilizando adhesivo de plastico PLA diluido en Cloruro de Metileno, este brazo se imprime en 4 partes que terminan en dos piezas, la primera es el armazon que sostiene la mano y la segunda es una tapa de cierre lateral con broche para asegurar el brazo. El volumen de relleno que se ha utilizado en estas piezas es de 20%, gracias a esto las partes plasticas no representan un peso importante para la prótesis.

Prototipo de palma

Impresión de piezas

Ensamble modular de brazo

Ensamble modular de brazo

Prototipo de Tapa para Palma

Ensamble de la parte lateral






Se ha diseñado una tapa de material flexible que se ubicará en la palma de la mano protésica protegiendo la extremidad, en esta tapa se instala también el sensor electrónico de presión que controla el movimiento de la prótesis.
Se imprime el mecanismo móvil de la prótesis con su tapa y el protector de la batería

Protesis pintura











Actividades
Reportes y TS Noviembre 2019
| Sabado 2 de Noviembre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Entrega final de prótesis al beneficiario | 4 Horas | 12 TS |
| Viernes 1 de Noviembre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Posicionamiento de sensor de presión de acuerdo a las medidas tomadas el sabado 26 | 4 Horas | 12 TS |
Reportes y TS Octubre 2019
| Jueves 31 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Adecuación de puerto para carga de la batería en la tapa previamente impresa | 4 Horas | 12 TS |
| Miercoles 30 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Adecuación de la superficie del socket | 4 Horas | 12 TS |
| Martes 29 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Calibración y pruebas basicas de agarre | 4 Horas | 12 TS |
| Lunes 28 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Cambio de sensor y continuación de calibración de posiciones de los motores | 4 Horas | 12 TS |
| Sabado 26 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Entrega de prótesis | 4 Horas | 12 TS |
| Viernes 25 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Detalles finales para la entrega | 3 Horas | 9 TS |
| Jueves 24 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Arreglo de detalles de pintura | 3 Horas | 9 TS |
| Miercoles 23 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Arreglo de detalles de pintura | 3 Horas | 9 TS |
| Martes 22 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Pruebas del programa de la protesis | 3 Horas | 9 TS |
| Lunes 21 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Pruebas del programa de la protesis | 4 Horas | 12 TS |
| Sabado 19 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Retoque de detalles finales para la entrega | 7 Horas | 21 TS |
| Thereduck | Retoque de detalles finales para la entrega | 7 Horas | 21 TS |
| Viernes 18 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Conexión de sensores de posición de los motores | 7 Horas | 21 TS |
| Jueves 17 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Cambio de hilos de tracción de los dedos | 7 Horas | 21 TS |
| Miercoles 16 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Ensamble de mecanismo nuevo de tracción de los dedos | 7 Horas | 21 TS |
| Martes 15 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Diseño de soportes para nuevos motores | 7 Horas | 21 TS |
| Lunes 14 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Prueba de nuevo mecanismo de accionamiento de los dedos | 7 Horas | 21 TS |
TODO: Se deben diseñar el soporte de los resortes, comprar resortes, rediseñar tarjeta pcb, rediseñar tapa de bateria
| Sabado 12 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Se ha probado el mecanismo de actuador lineal | 7 Horas | 21 TS |
| thereduck | junto a Fabian Bustos se observaron el funcionamiento y accionar del movento de los dedos y su mecanismo y fabian diseño un mecanismo mas eficaz para el accionar de los mismo | 2 Horas | 6 TS |
Comentarios: Se ha encontrado una falla en el actuador lineal que mueve los dedos de la prótesis, se diseñara e implementara un mecanismo mas sencillo
| Viernes 11 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Ensamble de actuador lineal | 4 Horas | 12 TS |
| Jueves 10 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Rediseño de partes mecánicas del actuador | 4 Horas | 12 TS |
| Miercoles 9 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Rediseño de partes mecánicas del actuador | 4 Horas | 12 TS |
| Martes 8 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Pruebas de fuerza de agarre | 4 Horas | 12 TS |
| Lunes 7 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Arreglo de detalles de pintura | 4 Horas | 12 TS |
| Sabado 5 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Ajuste y pintura de tapa de motor | 4 Horas | 12 TS |
| Viernes 4 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Ajuste y pintura de tapa de batería | 5 Horas | 15 TS |
| Jueves 3 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Impresión y cambio de dedos meñique y pulgar | 5 Horas | 15 TS |
| Miercoles 2 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Pruebas de circuito electrónico | 3 Horas | 9 TS |
| Daniela Arboleda | Ensamblar algunas partes de la prótesis | 5 Horas | 15 TS |
| Martes 1 de Octubre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Diseño, Impresión y Ensamble de la prótesis | 5 Horas | 15 TS |
| Daniela Arboleda | Ajustes en el interior de la prótesis | 3 Horas | 12 TS |
Reportes y TS Septiembre 2019
| Lunes 30 de Septiembre | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Diseño, Impresión y Ensamble de la protesis | 4 Horas | 12 TS |
| Daniela Arboleda | Reposicion del dedo meñique | 3 Horas | 9 TS |
| Sabado 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Diseño, Impresión y Ensamble de la prótesis | 9 Horas | 27 TS
|
| Viernes 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Diseño, Impresión y Ensamble de la protesis | 6 Horas | 18 TS |
| Daniela Arboleda | Impresion de algunas partes de las protesis | 2 Horas | 9 TS |
| Jueves 26 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Diseño, Impresión y Ensamble de la protesis | 6 Horas | 18 TS |
| Daniela Arboleda | Diseño de la tapa donde se ubica el motor e impresión | 5 Horas | 15 TS |
| Miercoles 25 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Diseño, Impresión y Ensamble del Brazo | 4 Horas | 12 TS |
| Daniela Arboleda | Modificación del Diseño, impresión y ensamble | 7 Horas | 21 TS |
Comentarios: Se debe buscar neopreno y las pinturas para el acabado final de la prótesis.
| Martes 24 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Diseño, Impresión y Ensamble del Brazo | 3 Horas | 9 TS |
| Daniela Arboleda | Diseño, Impresión y Ensamble del Brazo | 6 Horas | 18 TS |
Comentarios: Se debe buscar neopreno y las pinturas para el acabado final de la prótesis.
| Lunes 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Diseño, Impresión y Ensamble del Brazo | 6 Horas | 18 TS |
| Daniela Arboleda | Diseño, Impresión y Ensamble del Brazo | 5 Horas | 15 TS |
Comentarios: Se debe buscar neopreno y las pinturas para el acabado final de la prótesis.
| Sabado 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Ensamble del brazo | 6 Horas | 18 TS |
| Daniela Arboleda | Ensamble del brazo | 3 Horas | 9 TS |
Comentarios: Se debe buscar neopreno y las pinturas para el acabado final de la prótesis.
| Viernes 20 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Impresion de piezas | 7 Horas | 21 TS |
| Daniela Arboleda | Impresion de piezas | 3 Hora | 9 TS |
TODO: Queda pendiente la compra de los fingertips para los dedos de la mano
| Jueves 19 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Ensamble de la mano | 6 Horas | 18 TS |
| Daniela Arboleda | Ensamble de los dedos | 4 Horas y 20 min | 13 TS |
TODO: Queda pendiente la compra de los fingertips para los dedos de la mano
| Miercoles 18 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Impresión y ensamble de la mano | 6 Horas | 18 TS |
| Daniela Arboleda | Ensamble de los dedos | 7 Horas | 21 TS |
TODO: Queda pendiente la compra de los fingertips para los dedos de la mano
| Martes 17 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Impresión y ensamble de la mano | 6 Horas | 18 TS |
| Daniela Arboleda | Impresión y ensamble de la mano | 6 Horas | 18 TS |
TODO: Queda pendiente la compra de los fingertips para los dedos de la mano
| Lunes 16 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Impresión de Prótesis | 7 Horas | 21 TS |
| Daniela Arboleda | Diseño de circuito electrónico en PCB | 6 Horas | 18 TS |
TODO: Queda pendiente la compra de los fingertips para los dedos de la mano
| Sabado 14 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Impresión de dedos de la mano | 4 Horas | 12 TS |
TODO: Queda pendiente la compra de los fingertips para los dedos de la mano
| Viernes 13 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Impresión de dedos de la mano | 4 Horas | 12 TS |
| Pi rat | Impresión de dedos de la mano | 2 Horas | 6 TS |
TODO: Queda pendiente la compra de los fingertips para los dedos de la mano
| Jueves 12 | Descripción | Tiempo | TS |
|---|---|---|---|
| Fabian Bustos | Impresión de dedos de la mano | 4 Horas | 12 TS |
TODO: Queda pendiente la compra de los fingertips para los dedos de la mano
| Miércoles 11 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | Impresión final del dedo corazón. Se volvió a realizar la impresión de mano y se actualizó de la wiki | 6 Horas | 18 TS |
| Fabian Bustos | Impresión final del dedo corazón. Se volvió a realizar la impresión de mano | 2 Horas | 6 TS |
TODO: Queda pendiente la compra de los fingertips para los dedos de la mano
| Martes 10 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | Se realizó el circuito esquematico y circuito en pcb | 4 Horas | 12 TS |
| Fabian Bustos | Impresión final del dedo meñique | 4 Horas | 12 TS |
TODO: Queda pendiente la compra de los fingertips para los dedos de la mano
| Lunes 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | impresión de dedos | 3 Horas | 9 TS |
| Miguel Duran | impresión de dedos | 3 Horas | 9 TS |
| Fabian Bustos | Impresión de dedos | 4 Horas | 12 TS |
| Sabado 7 | Descripción | Tiempo | TS
|
|---|---|---|---|
| Fabian Bustos | Impresión de dedos y ajuste de medidas al modelo 3D | 6 Horas | 18 TS |
TODO: Queda pendiente la compra de los fingertips para los dedos de la mano [1].
| Viernes 6 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | Impresión de dedos y decoración | 7 Horas | 21 TS |
| Fabian Bustos | Impresión de dedos y decoración | 4 Horas | 12 TS |
TODO: Queda pendiente la compra de los fingertips para los dedos de la mano [2].
| Jueves 5 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | Impresión de dedos, palma de la mano y decoraciones | 6 Horas | 18 TS |
| Fabian Bustos | Impresión de dedos y palma de la mano | 6 Horas | 18 TS |
TODO: Queda pendiente la compra de los fingertips para los dedos de la mano [3].
| Miercoles 4 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | Impresión de dedos, palma de la mano y decoraciones, se realizaron algunas modificacones | 6 Horas | 18 TS |
| Fabian Bustos | Impresión de dedos y palma de la mano | 6 Horas | 18 TS |
TODO: Queda pendiente la compra de los fingertips para los dedos de la mano [4].
| Martes 3 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | Prueba de impresión de dedos | 6 Horas | 18 TS |
| Fabian Bustos | Prueba impresión de dedos | 6 Horas | 18 TS |
TODO: Retoque de detalles en la palma y dedos, impresión de la mano
| Lunes 2 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | Pruebas de impresión del dedo meñique | 3 Horas | 9 TS |
| Fabian Bustos | Pruebas de impresión del dedo meñique | 3 Horas | 12 TS |
TODO: Retoque de detalles en la palma y dedos, impresión de la mano
Reportes y TS Agosto 2019
| Sabado 31 | Descripción | Tiempo | TS
|
|---|---|---|---|
| Fabian Bustos | Integración de los elementos mecánicos en el modelo de la prótesis | 4 Horas | 12 TS |
| Viernes 30 | Descripción | Tiempo | TS
|
|---|---|---|---|
| Fabian Bustos | Integración de los elementos mecánicos en el modelo de la prótesis | 4 Horas | 12 TS |
| Jueves 29 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | En el día de hoy se hicieron las pruebas de impresión de dos dedos de la mano | 6 Horas | 18 TS |
Comentarios: Se imprimieron dos dedos de prueba con problemas de baja calidad en la textura. TODO: Probar diferentes configuraciones de impresión para lograr el mejor resultado posible.
| Miércoles 28 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | Se empezó a trabajar en el nuevo modelo de la mano, se desarrollaron algunas modificaciones | 6 Horas | 18 TS |
| Fabian Bustos | Se empezó a trabajar en el nuevo modelo de la mano, se desarrollaron algunas modificaciones | 4 Horas | 12 TS |
| Pirat | Se empezó a trabajar en el nuevo modelo de la mano, se desarrollaron algunas modificaciones | 2 Horas | 6 TS |
| Martes 27 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | Se considera el cambio del modelo de la mano por problemas de incompatibilidad entre las mallas. | 3 Horas | 9 TS |
| Fabian Bustos | Se considera el cambio del modelo de la mano por problemas de incompatibilidad entre las mallas. | 4 Horas | 12 TS |
| Lunes 26 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | Construcción de los conductos internos para los hilos de la mano protésica | 3 Horas | 9 TS |
| Fabian Bustos | Construcción de los conductos internos para los hilos de la mano protésica | 4 Horas | 12 TS |
| Pirat | Construcción de los conductos internos para los hilos de la mano protésica | 2 Horas | 6 TS |
| viernes 23 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | Modificaciones a la unión entre la mano y el brazo de la prótesis | 5 Horas | 15 TS |
| Fabian Bustos | Modificaciones a la unión entre la mano y el brazo de la prótesis | 4 Horas | 12 TS |
| jueves 22 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | Análisis de uso de la prótesis | 2 Horas | 6 TS |
| Fabian Bustos | Análisis de uso de la prótesis | 4 Horas | 12 TS |
| Pirat | Análisis de uso de la prótesis | 2 Horas | 6 TS |
| Miércoles 21 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | Se termino de realizar las decoraciones y algunas reestructuraciones de la mano del prototipo de Halo | 5 Horas | 15 TS |
| Fabian Bustos | Investigación sobre materiales para el Socket de la prótesis | 4 Horas | 12 TS |
| Viernes 16 | Descripción | Tiempo | TS |
|---|---|---|---|
| Pirat | impresion | 2 Horas | 6 TS |
| Fabian Bustos | Programación del firmware de la prótesis | 4 Horas | 12 TS |
| Jueves 15 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | Se llevaron acabo algunas correcciones a los elementos realizados el día anterior, ya que presentaron errores al unir todos los cuerpos del objeto. | 5 Horas | 15 TS |
| Fabian Bustos | Programación del firmware de la prótesis | 4 Horas | 12 TS |
| Miércoles 14 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | Se desarrollaron las decoraciones que se ubican en la mano acorde a las peticiones del beneficiario. . | 6 Horas | 18 TS |
| Fabian Bustos | Programación del firmware de la prótesis | 4 Horas | 12 TS |
Comentario: Solo se pudo terminar un dedo, ya que se presentaron diferentes complicaciones con el diseño.
| Martes 13 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | En esta parte del proceso se realizó diferentes modificaciones a los diseños establecidos anteriormente con el fin de brindar una mayor comodidad al beneficiario. | 3 Horas | 9 TS |
| Fabian Bustos | Modelado de la tapa que cubre la extremidad sobre la palma | 5 Horas | 15 TS |
| Lunes 12 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | Para la segunda parte de este proceso, se uso como guía un archivo descargado de Thingiverse al cual se le realizaron algunas modificaciones a la estructura de Halo, tales como la eliminación de algunas partes sobrantes del modelo, ajustar las medidas según el socket diseñado, convertirlo a un modelo solido y volver a estructurar el área de la mano para adaptarla a la del paciente. | 3 Horas | 9 TS |
| Fabian Bustos | Modificación de la palma de la protesis para que se acople a la forma de la extremidad | 4 Horas | 12 TS |
| Viernes 9 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | Se ha hecho el modelo 3D de la palma de la mano en Rhinoceros | 6 Horas | 18 TS |
| Fabian Bustos | Montaje del prototipo del actuador mecánico que moverá los dedos en la prótesis | 5 horas | 15 TS |
TODO: Modelado de los dedos de la mano protésica
| Jueves 8 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | Se ha hecho el modelo 3D de la palma de la mano en Rhinoceros | 6 Horas | 18 TS |
| Fabian Bustos | Montaje del prototipo del actuador mecánico que moverá los dedos en la prótesis | 5 horas | 15 TS |
TODO: Modelado de los dedos de la mano protésica
| Miercoles 7 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | Se han utilizado las medidas tomadas en la evaluación antropométrica para escalar la extremidad al tamaño real y asi trabajar sobre ella el diseño de la protesis | 3 Horas | 9 TS |
| Fabian Bustos | Modelado básico de la prótesis teniendo en cuenta los componentes mecánicos y electrónicos | 3 horas | 9 TS |
TODO:Modelado basico de la mano protésica
| Martes 6 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | Diseño de los dedos de la extremidad | 8 Horas | 24 TS |
| Fabian Bustos | Modelado basico de la prótesis teniendo en cuenta los componentes mecánicos y electrónicos | 4 horas | 12 TS |
TODO: Escalado de la extremidad a tamaño real Commentarios: Hemos seleccionado el software Rhinoceros para continuar el diseño ya que Fusion 360 no funciona muy bien a causa de la conexion a internet
| Lunes 5 | Descripción | Tiempo | TS |
|---|---|---|---|
| Daniela Arboleda | Se ha hecho el modelo tridimensional de la extremidad en el sofware FUSION 360 | 6 Horas | 18 TS |
| Fabian Bustos | Modelado basico de la prótesis teniendo en cuenta las medidas del brazo izquierdo | 4 horas | 12 TS |
TODO: Diseño de los dedos de la extremidad. Comentarios: Hemos tenido dificultad con el software Fusion 360 funciona online y la conexión a internet es de mala calidad.